Устройство относится к электронной технике, а именно к аналоговым моделирующим устройствам, которые могут найти применение при моделиро вании лентопротяжных механизмов аппаратов магнитной записи. Известно устройство для исследования лентопротяжного механизма, со держащее ролики, выполненные с винтоЬбразньади пазгида и соединенные ме ханической передачей, позволягевдее моделировать колебания магнитного носителя 11. Однако данное устройство не позв ляет изменять моделируемые воздейст вия в лентопротяжном механизме. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство содержащее анализатор записываемого сигнала, генератор, блок нелиней него сопротивления, модулятор, исто ник постоянного напряжения, интегра тор, пьезоэлектрический двигатель, датчик силы протягивания носителя и сумматор, первый вход которого соединен с датчиком силы протягивания, второй вход - с выходом блока нелинейного сопротивления, третий вход - с выходом генератора, .aNвыход - с первым входом интегратора, второй вход которого соединен с . источником постоянного напряжения, а третий вход и выход соединены с входом блока нелинейного сопротивле ния и входом модулятора, а выход последнего .подключен к дьезокерамическому двигателю t23. Известное устройст зо позволяет моделировать только структуру и параметры ведущих узлов лентопротяж ных механизмов, которые ,однако, имеют и другие основные узлы, такие как подающие, от качества работы ко торых в основном зависит точность передачи информации в этих механизмах.. Цель изобретения - растление функциональных возможностей за счет воспроизведения режимов работы пода щего узла. Поставленная цель достигается тем, что в устройство для моделиров ния лентопротяжного механизма, соде жащее первый интегратор, первый сум матор, датчик силы протягивания лен ты, блок задания начальных условий, выход задания начального радиуса ле ты, выход которого соединен с первы входом первого интегратора, усилите с управляемым коэффициентом усиления, анализатор сигналов, состоящий из генератора шума, блока измерения условной плотности сигналовJ головки записи и головки воспроизведения, выход генератора шума сое, динен с входом головки записи и первым входом блока измерения услов ной плотности сигналов, второй вход которого подключен к выходу головки воспроизведения, головка записи и головка воспроизведения расположены последовательно по направлению движения ленты, введены два элемента регулирования натяжения ленты,выполненные в виде пьезокерамических прокладок, -датчик скорости протягивания ленты, карман-формирователь свободной петли ленты, два блока умножения, втopoйvсумматор, второй интегратор, блок деления, блок вычитания, причем выходы задания постоянного крутящего элемента и постоянного момента инерции блока задания начальных условий соединены соответственно с первыми входами первого и второго сумматоров, вторые входы которых- подключены соответственно к вы,ходам первого и второго блоков умножения, первые входы которых рбъединены и соединены с выходом первого интегратора, второй-вход первого блока умножения подключен к выходу датчика силы протягивания ленты, выход первого сумматора подключен к первому входу второго интегратора, выход которого соединен с первым входом блока деления, второй вход которого подключен к выходу второго сумматора, выход блока деления соединен с вторым входом второго интегратора и первым входом блока вычитания, второй вход, которого подключен к выходу датчика скорости движения ленты, а выход блока -вычитания через усилитель с управляемым коэффициентом усиления соединен с входами пьезокерамических прокладок, а карман-формирователь свободной петли ленты, пьезокерамические прокладки , устанойленные с обеих сторон ленты, датчик скорости движеНия ленты и датчик силы протяжки ленты установлены последовательно по на- . правлению движения ленты перед головкой записи. На чертеже представлена функциональная схема устройства для моделирования Лентопротяжного механизма. Устройство содержит анализатор 1 записываемых сигналов, состоящий из головок записи 2 и воспроизведения 3, генератор 4 шума и блока 5 измерения условных вероятностей сигналов. В тракте лентопротяжного механизма установлен карман-формирователь б свободной петли ленты, между которым и записывающей головкой -2 установлены последовательно пО направлению движения носителя 7пьезокерамические прокладки 8 с обеих сторон ленты, датчики скорости 9 движения ленты и силы 10 протягивания ленты. Устройство также включает первый интегратор 11, первый 12 и вто рой 13 сумматоры, первый 14 и второй 15 блоки умножений, блок 16 деления, блок 17 вычитания, блок 1 задания начальных условий, усилитель 19 С управляемым коэффициенто усиления и второй интегратор 20. Причем выход сумматора 13 подключе соответственно через блоки деле-, ния 16, вычитания 17 и усилитель 1 к пьезокерамическим прокладкам 8. ,Указанные прокладки, датчики ско рости 9 ленты и силы 10 протягивания лента установлены в тракте лентопротяжного механизма последовательно по направлению движения магнитной ленты, а выходы этих дат чиков соединены соответственно с входами блока 17 вычитания и блока 14 умножения, Подкатушник, катушка с магнитной лентой и подающий двигатель (с мягкой характеристикой) лентопротяжного механизма аппаратов маг нитной записи моделируются следующим образом. Уравнение движения подающего узла лентопротяжного механизма мож но представить в виде л +OK(t) tf (t) , (1) где J - постоянная часть момента инерции подкатушника; ц() момент инерции рулону магнитной ленты, являкщихся функцией времени; В - коэффициент, характеризующий наклон характеристики двигателя подающего узла; М - постоянный крутящий момент - приложенный к двигателю по дающего узла; Т - сила натяжения носителя в рабочем состоянии; R(-t)- радиус ленты в рулоне, являющийся функцией времени. Так как при работе лентопротяжного механизма количество магнитно ленты в катушке изменяется, то изм няется и ее масса, а в связи с эти и момент инерции J. Изменяется та же и радиус R в зависимости от кол чества ленты в катушке, т.е. в зав симости от времени t. Решение уравнения () происходит следующим образом. При помощи датчика 10 измеряется продольное натяжение ленты, т.е на его выходе появляется сигнал, пропорциональный натяжению. Сигнал поступает на вход первого блока 14 умножения, на другой вход которого поступает сигнал с выхода интегратора 11, пропорциональный радиусу катушкис лентой.-Этот сигнал формируется по положительному напряжению, поступающему с первого выхода блока 18. Если указанное напряжение равно и, а начальными уело ВИЯМИ интегратору 11 заданы величины и, то выходной сигнал на его выходе R(t))t , т.е. R, как и в реальных аппаратах магнитной записи, уменьшается с увеличением времени. При этом и ков эффициент, пропорциональный начальному радиусу ленты в катушке, а U - коэффициент, зависящий от скорости протягивания магнитной ленты и от ее толщины. Таким обраэом, на выходе блока 14 умножения формируется сигнал, пропорциональный произведению величины TR , который затем поступает на первый сумматор 12, на другой вход которого подается другой сигнал с выхода блока 18, пропорциональный моменту М. На выходе сумматора 12 формируется сигнал, пропорциональный сумме напряжения M+TR, поступающий на первый вход интегратора 20, выход которого соединен с первым входом блока 16 деления и на выходе которого формируется сигнал, пропорциональный скорости f перемещения двигателя подающего узла. Для форми-;рования такого сигнала выход блока 16 деления соединен с вторым входом интегратора 11. -Таким образом, на его выходе образуется суммарный сигнал, пропорциональный M+TR-B, по уравнению (1) соответствующий величине P+J) интегрируемой интегратором 2, для получения на выходе блока 16 деления сигнала, равного #. Сигнал, равный P + J«)Q, делится при помощи блока 16 деления на сигнал, пропорциональный (3 + 3,,) . Он формируется сигналом, поступаюЕЦим с выхода интегратору И, пропорциональным радиусу Р, который поступает на . блок 15 умножения, где величина сигнала умножается на саму себя и на .- . его выходе формируется сигнал, пропорциональный R2. далее сигнал поступает на вход сумматора 13 с учетом коэффициента, пррпорционального массе m подвижной части моделируемого подающего узла, на другой вход которого подается постоянное напряжение С-- выхода блока 18, прапорциональное моменту инерции J. Таким образом, на другой вход блока 16 деления поступает сигнал, пропорциональный (J +ftiR (J+) . Сигнал с выхода блока 16 деления, пропорциональный скорости вращения ротора двигателя подающего узла лентопротяжного механизма, поступает на вход блока 17 вычитания, на второй вход которого подается сигнал t с выхода датчика 9 скорости перемещения носителя информации. Эту скорость ff задает стационарный ведущий двигатель лентопротяжного мехйнизма.
На выходе блока 17 вычитания, таким образом, фop шpyeтcя разность между упомянутыми скоростями. Сигнал с его выхода через усилитель 19 с управляемым коэффициентом усиле ния поступает на вход пьезокерамических прокладок 8, которые, перемещаясь относительно обеих сторон: магнитной ленты, развивают силу сопротивления перемещению носителя информации, пропорциональную йеличине .входного сигнала, т.е. разности между скоростями носителя X и двигателя подакщего узла t. Таким образом, пьезокерамические прокладки способствуют управлению натяжением Магнитной ленты, которая увеличивается с увелИч-ением силы сжатия прокладками магнитной ленты и наоборот.
В начальный момент моделирования динамических параметров 3 , , В и М подающего узла всегда ,
.т.е. носитель движется без натяжения. Поэтому на выходе блока 17 образуется сигнал, который через усилитель 19 обеспечивает большое сжатие магнитной ленты с обеих сторон при помощи.пьезокерамических прокладок 8. Натяжение магнитной лента в тракте записи-воспроизведения лентопротяжного механизма р.езко увеличивается, но при этом с выхода датчика 10 поступа.зтсигнал, .увеличивающий скорость движения подагадего двигателя V /уравнение (1), Вследствие этого сигнал, поступающий с выхода блока 17 по амплитуде, постепенно уменьшается, ч:т6 непосредственно уменьшает продольное натяжение магнитной ленты. Когда RS будет примерно равно скорости датчика движения магнитной ленты X, работа подающего узла и всего лентопротяжного механизма стабилизируется.
Таким образо, изменяя такие ди. намические параметры подаквде о узла лентопротяжного механизма, как 3/ В, М, можно легко определить оптимальные значения этих параметров по точности передачи информации
в-лентопротяжных механизмах аппаратов магни йой записи. В качестве критериев точности передачи информации можно использовать обобщенные характеристики ка ества воспроизведения сигналов по отношению к записываемым сигналам, т.е. информационные . Для этой цели в предлагаемом устройстве используется анализатор записываекаах и воспроизводиNttix .сигналов. Изменение других пара,метров моделируемого подающего узла (3, О и U) позволяет исследовать различные типы конструкций подкатушника этого узла и определить оптимальные геометрические параметры подающей кассеты или магнитной ленты по точности передачи информации я лентопротяжных механизмах. Таким образом, предлагаемое
устройство для моделирования лентопротяжного механизма позволяет плавно и в широких диапазонах изменять величину динамических и конструктивных параметров подающего узла и устанавливать их оптимальные значения
по точности воспроизведения информации в этих механизмах.
В результате использования изобретения благодаря введению новых бЛоков и взаимосвязей обеспечивается возможность определения оптимальных величин и допусков динамических параметров подающего узла лентопротяжных механизмов относительно точноети передачи информации в аппаратах
магнитной записи, что расширяет функциональные возможности исследования динамики лентопротяжных механизмов в стещии их разработки.
Экономичность и эффективность предлагаемого устройства определяется расширением диапазона моделирующих воздействий параметров лентопротйжного механизма, что экономит время
исследования динамики подающих узлов указанных механизмов и обеспечивает более высокую точность при разработке этих узлов и оценке их параметров по точности воспроизведения информации.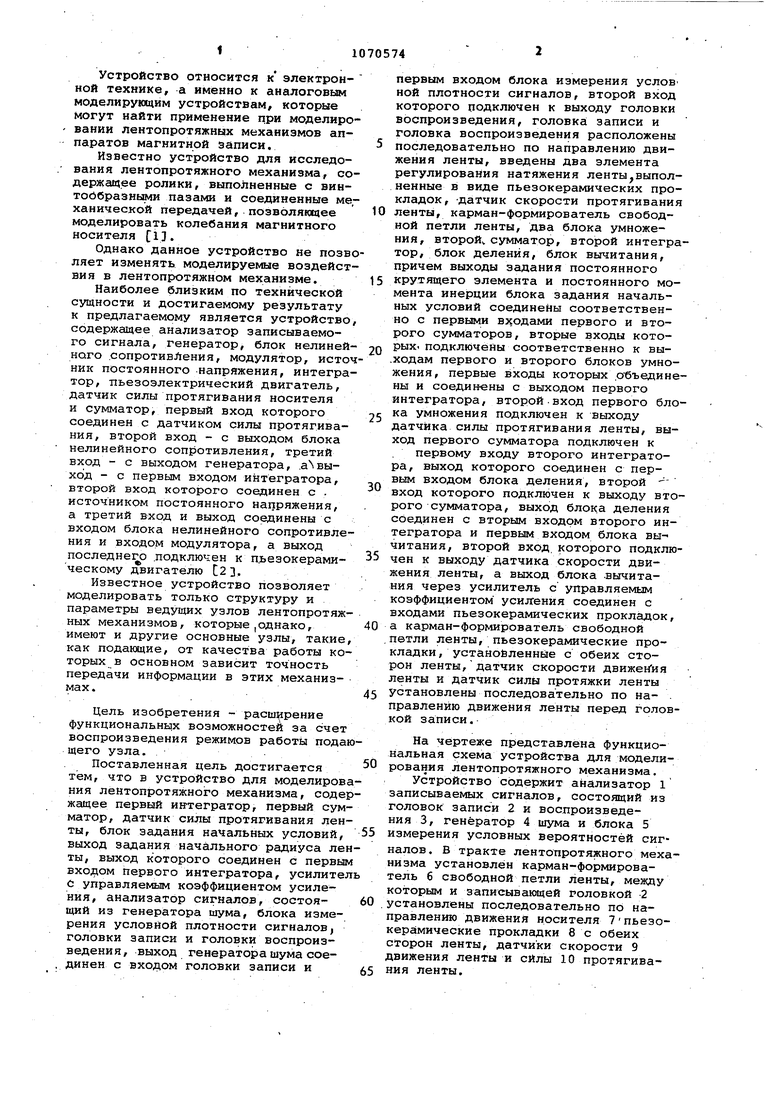
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для создания ориентированных колебаний магнитной ленты | 1980 |
|
SU900311A1 |
| Устройство для управления движением магнитной ленты | 1979 |
|
SU781951A1 |
| Устройство для перемещения магнитной ленты | 1990 |
|
SU1705865A1 |
| Устройство поиска записи в стереофоническом магнитофоне | 1983 |
|
SU1164782A1 |
| Устройство для воспроизведения измерительной информации с носителя магнитной записи | 1982 |
|
SU1048506A1 |
| Многокомпонентные аэродинамические весы с вычислительным устройством | 1961 |
|
SU150301A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2018128C1 |
| Устройство для компенсации искажений при воспроизведении частотно- модулированных сигналов | 1979 |
|
SU788156A1 |
| Устройство для измерения вибраций движущихся объектов | 1978 |
|
SU877348A1 |
| Устройство для магнитной записи-воспроизведения цифровой информации | 1984 |
|
SU1190403A1 |
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЛЕНТОПРОТЯЖНОГО МЕХАНИЗМА, содержащее первый интегратор, пер-вый сумматор, датчик силы протягивания ленты, блок задания начальных условий, выход задания начального радиуса ленты, выход которого соединен с первым входом первого, интегратора, усилитель с управляемым коэффициентов усиления, анализатор сигналов, состоящий из генератора шума, блока измерения условной плотности сигналов, головки записи, головки воспроизведения, выход генератора шума соединен с входом головки записи и первым входом блока измерения условной плотности сигналов, второй вход которого подключен к выходу головки воспроизведения, головка записи и головка воспроизведения расположены последовательно по направле- нию движения ленты, отличайте е с я тем, что, с целью расширения функциональных возможностей за счет воспроизведения режимов работы подающего узла, оно дополнительно содержит датчик скорости протягивания ленты, два элемента регулирования натяжения ленты, выполненные в виде пьезокерамических прокладок, карман-формирователь свободной петли ленты, два блока умножения, второй сумматор, второй интегратор, блок деления, блок вычита- . ния, причем выходы задания постоян-ного .крутящего элемента и постоян- ного момента инерции блока задания начальных условий соединены соответственно с первь1ми входами первого и второго сумматоров, вторые входы которых подключены соответственно к выходам первого и второго блоков умножения, первые входы которых объединены и соединены, с выходом первого интегратора, второй вход первого блока умножения подключен (Л к выходу датчика силы протягивания ленты, выход первого сумматора подключен к первому входу второго интегратора, выход которого соединен с первым входом блока деления, второй вход которого подключен к выходу второго сумматора, выход блока деления соединен с вторым входом второго интегратора и первым входом блока вычитания, второй вход которого подключен к выходу датчика скорости движения ленты, выход блоел ка вычитания через усилитель с уп41 равляемым коэффициентом усиления соединен с входами пьезокерамичесФ . ких прокладок,а карман-Формирователь свободной петли ленты/ пьезокерамические прокладки, установленные с обеих сторон ленты, датчик скорости движения ленты и датчик силы протяжки ленты установлены последовательно по направлению движения ленты перед головкой записи.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для создания ориентированных колебаний магнитной ленты | 1974 |
|
SU491992A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для моделирования лентопротяжного механизма | 1980 |
|
SU877574A1 |
