(54) СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА
1
Изобретение относится к транспортному машиностроению и может быть использовано при создании систем управления поворотом как отдельных многоосных транспортных средств, так и прицепов и полуприцепов с поворотными осями или колесами.
Известен способ управления поворотом многоосного транспортного средства, закючающийся в том, что одну, из осей заднего колесного хода поворачивают так, чтобы при круговом установившемся движении транспортного средства ее колеса двигались по заданной траектории движения колес одной из осей Переднего колесного хода, а остальные оси поворачивают так, чтобы центр поворота каждой .оси совпадал с, центром кругового установившегося движения 1 .
Недостатком данного способа управления является то, что при движении по деформируемым грунтам на повороте колеса заднего колесного хода прорезают дополнительную колею, что значительно увеличивает сопротивление движению транспортного средства.
Цель изобретения - уменьшение сопротивления движению по деформируемым грунтам на повороте.
Указанная цель достигается тем; что смещают каждую ось заднего хода относительно рамы в сторону заданной траектории на величину, равную смешению этой оси заданной траектории движения, причем смешение оси производят путем приложения к оси и дополнительной боковой силы,
10 величина которой пропорциональна боковому смешению оси от заданной траектории движения.
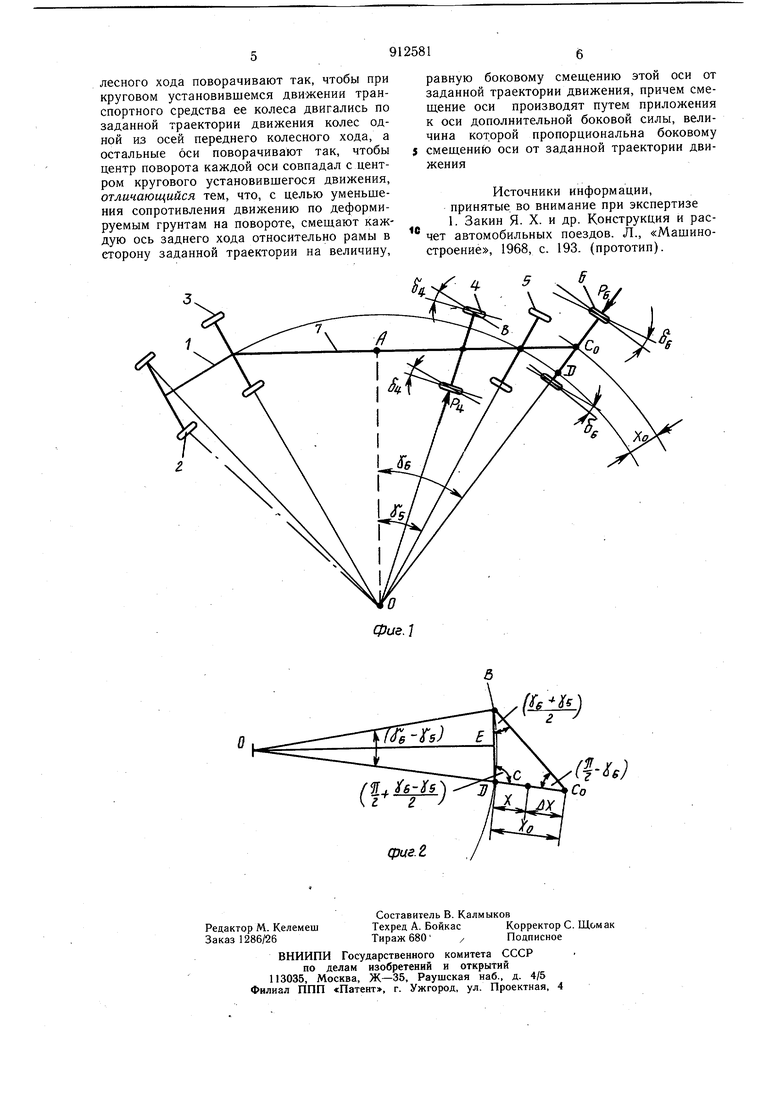
На фиг. 1 показана схема движения на повороте многоосного транспортного средства, в составе двухосного тягача и трехос15ного полуприцепа со всеми поворотными осями; на фиг. 2 - схема движения на повороте второй и третьей оси полуприцепа. Для многоосного транспортного средства (фиг. 1) передним колесным ходом является тягач 1 с передними поворотными колесами 2 и с задней неповоротной осью 3. Задним колесным ходом является колесный ход полуприцепа, который в данном случае состоит из. первой 4, второй 5 и тертьей 6 осей; поворотных относительно рамы 7 полуприцепа. Вторую ось 5 поворачивают относительно рамы 7 на угол, равный углу складывания тягача с полуприепом, что обеспечивает движение колес второй оси 5 по заданной траектории движения колес задней оси переднего колесного хода (тягача). Остальные колесные оси 4 и 6 поворачивают так, чтобы центр поворота каждой оси совпадал с центром О кругового установившегося движения. При этом угол поворота оси относительно рамы определяют из звисимости, полученной, например, для оси 6 из треугольников ОАВ и ОАСо, Полученных путем восстановления перпендикуляра О А tgiB i tg 5 -7rB g 5(l) где АВ равно половине базы полуприцепа (расстояния от оси 3 до оси 6). Одновременно с поворотом осей определяют расстояние от них до заданной траектории, по которой движется ось 5, и перемещают ось 6 к центру поворота пут.ем создания дополнительной боковой силы Pg от рамы 7 к оси 6, а ось 4 перемешают от центра поворота путем создания дополнительной боковой силы В, от рамы 7 к оси 4. При создании дополнительной боковой силы на ось 6 появляется угол бокового увода 6 эластичной шины, в результате чего ось 6, выполненная подвижной относительно рамы 7, перемещается в направлении к заданной траектории. Величину силы регулируют так, чтобы она была пропорциональна расстоянию от смещаемой оси до заданной траектории. Поэтому при равенстве нулю этого расстояния дополнительную боковую силу к оси не прикладывают, и колеса катятся по заданной траектории, чем обеспечивается наименьшее сопротивление движению автопоезда. Для определения расстояния от оси до заданной траектории рассмотрим треугольник OBQ . Если ось не смещалась ни в какую сторону, то ее расстояние до заданной траектории равно начальному расстоянию. Чтобы определить это расстояние соединим дугу окружности хордовой BD и рассмотрим треугольник BCoD (фиг. 2). В этом треугольнике В.СвО - Уб. а CoDB Ч- JL. Восстановим из точки О перпендикуляр ОЕ. Поскольку треугольник DOB равнобедренный, -ibps- и тогда ВОО EDO |, а угол CoDB f + -Ms и тогда DBQ, BCoD- CoDB . Из треугольника BCoD согласно теоремы синусов получаем формулу для ..определения начального расстояния () (2) Хо ВСрcos f яб - у Путем тождественных преобразований формулу (2) можнопредставить в следующих Хо ВСо sing -BCe cosy6tg(-) (3) Хо ВС, sin4+ BGoCosjTs tg () (4) Если ось смещена влево от нейтрального положения на величину GC Ах, то расстояние до заданной траектории равно X ДС XQ- Ах Таким образом, для определения расстояния от оси до заданной траектории замеряют угол поворота какой-либо оси колесного хода, определяют по одной из формул (2), (3) или (4) с учетом зависимости (1) начальное расстояние. Хо и замеряют смещение Ах оси от нейтрального положения относительно рамы полуприцепа. Тогда расстояние от оси до заданной траектории определяют как разность расстояний х Xj -A)f. При этом если принять, что угол поворота оси относительно рамы против часовой стрелки положителен (ось 3), а по часовой стрелке - отрицателен (оси 4, 5 и 6) и за положительное расстояние между смещаемой осью и осью, которая движется по заданной траектории (ось 5), принять расстояние к точке А, а за отрицательное - от точки А, то дополнительная боковая сила, прикладываемая к оси и смещению, вызываемое ею, имеет положительный знак, если направлены влево, и отрицательный знак - если направлены вправо. Тогда величину дополнительной боковой силы, например, на ось 6 необходимо регулировать согласно формулы Рб к (х„ - Лх)(5) где К - коэффициент пропорциональности. Для многоосного транспортного средства с поворотными колесами необходимо управлять аналогичным образом колесами не только каждой оси, но и отдельно левым и правым колесами одной оси, поскольку они поворачиваются на разные углы и на разном расстоянии находятся от заданной траектории. Технико-эконолхиЧеская , эффективность предлагаемого способа заключается в уменьшении сопротивлениядвижению по деформируемым грунтам на повороте многоосных транспортных средств, что улучшает проходимость подобных транспортных средств, снижает потребную мощность двигателя и расход топлива. Формула изобретения Способ управления поворотом многоосного транспортного средства заключающийся в том, что одну из осей заднего ко
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поворотом автотранспортного звена | 1980 |
|
SU979192A1 |
| ПРИЦЕП ДЛЯ АВТОПОЕЗДА | 2001 |
|
RU2282551C2 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| Способ управления задними колесами транспортного звена | 1977 |
|
SU683942A1 |
| АВТОПРИЦЕП С УПРАВЛЯЕМЫМ ВСПОМОГАТЕЛЬНЫМ МОСТОМ | 2013 |
|
RU2616119C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОЛЕСАМИ ПОЛУПРИЦЕПА | 2009 |
|
RU2440265C2 |
| Устройство для управления поворотом двухосной тележки полуприцепа | 1987 |
|
SU1482848A1 |
| Опорно-поворотное устройство двухосного прицепа | 2023 |
|
RU2805576C1 |
| Автопоезд | 1976 |
|
SU640892A1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2791633C1 |
