(54) СПОСОБ УПРАВЛЕНИЯ З.ЛД1111.11 КОЛЕС.Л.М ТРАНСПОРТНОГО ЗВЕНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления задними колесами транспортного звена | 1982 |
|
SU1034939A1 |
| Способ управления поворотом прицеп-НыХ зВЕНьЕВ АВТОпОЕздА | 1979 |
|
SU844443A1 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство для управления колесами звеньев автопоезда | 1980 |
|
SU867756A1 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для управления поворотом ведомого звена автопоезда | 1985 |
|
SU1311989A1 |
| Способ управления поворотом автотранспортного звена | 1980 |
|
SU979192A1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Прицеп | 1986 |
|
SU1397349A1 |
1
Изобретение относится к уиравлению преимущественно длиннобазными одиночными автотранспортны.ми звеньями или звеньями, в.ходящими в состав длиннобазного или мнЪгозвенного автопоезда.
Известен способ управления колесными осями автопоезда, заключающийся в том, что в управляемую- связь вводят сигнал, пропорциональный углу поворота предшествующей колесной оси, и поворачивает управляемую колесную ось на угол, равный алгебраической сумме угла поворота предшествующей колесной оси и угла складывания предществующих вагонов 1.
Недостатком данного способа является то, что на переходных режимах поворота появляются смещения, достигающие больщой величины у длиннобазных и многозвенных автопоездов. Кроме того, этот способ неприменим для управления задними колесами одиночного транспортного звена.
Известен также способ управления задними колесами транснортного звена, поворотами относительно рамы звена, заключающийся в том, что определяют угол поворота очередных колес, задерживают сигнал.
пропорциональный углу попорота на время прохождения ко. есамн пути запаздывания, равного расстоянию до передних колес 2.
Недостатком данного способа является то, что он нрименим для управления только передними колесами прицепов и,1и колесами независимой поворотной тележки, на которую П1арнирно опирается грузонесущая рама прицепа или полуприцепа. Этот способ не обеспечивает движение задних колес прицепа по траектории движении передних колес. Кроме того, этот способ неприемлем для управления задними колесами одиночного транспортного звена или колесами полуприцепа, колеса которых поворачиваются относительно рамы звена, а не объединены в независимую поворотную тележку.
Целью настоящего изобретения является устранение указанных недостатков, а именно - обеспечение возможности повторения задними колесами траектории движения передних колес независимо от рельефа дороги и перемены скоростей звена в процессе поворота.
Указанная цель достигается тем, что, перед задержкой сигнала определяют угол поворота рамы звена и поворачивают задние колеса на угол, полученный сложением угла поворота рамы звена с углом поворота передних колес и вычитанием из полученного значения после задержки сигнала, угла поворота рамы звена.
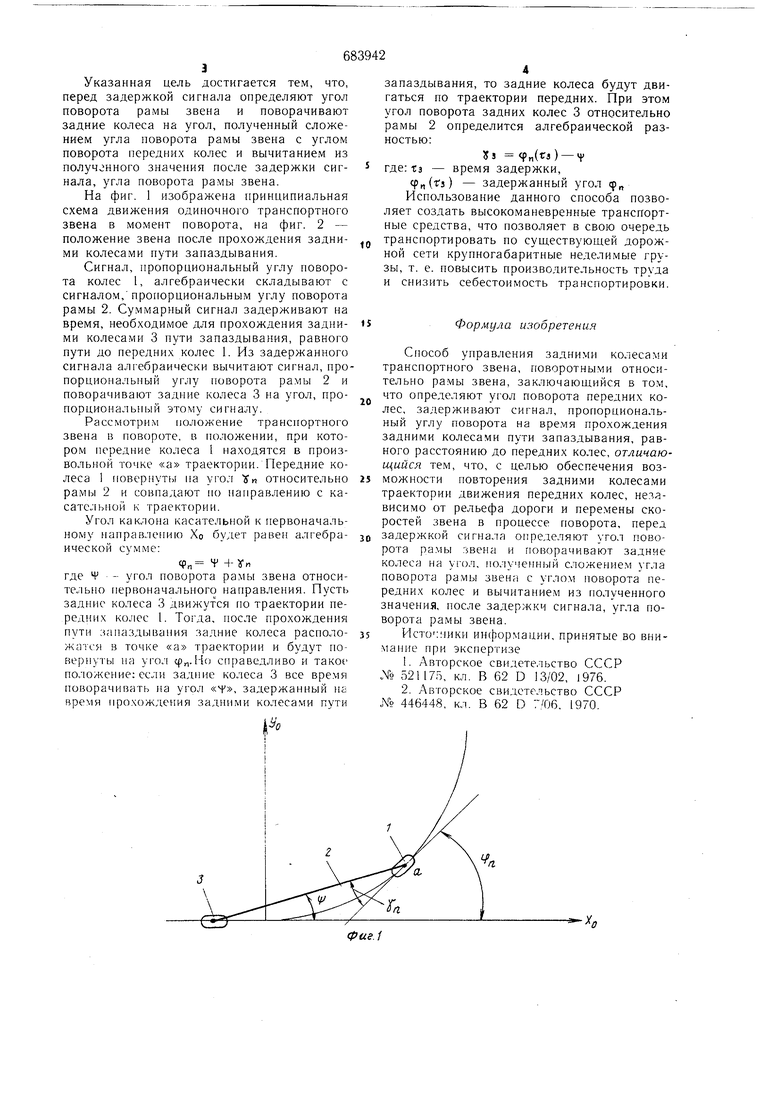
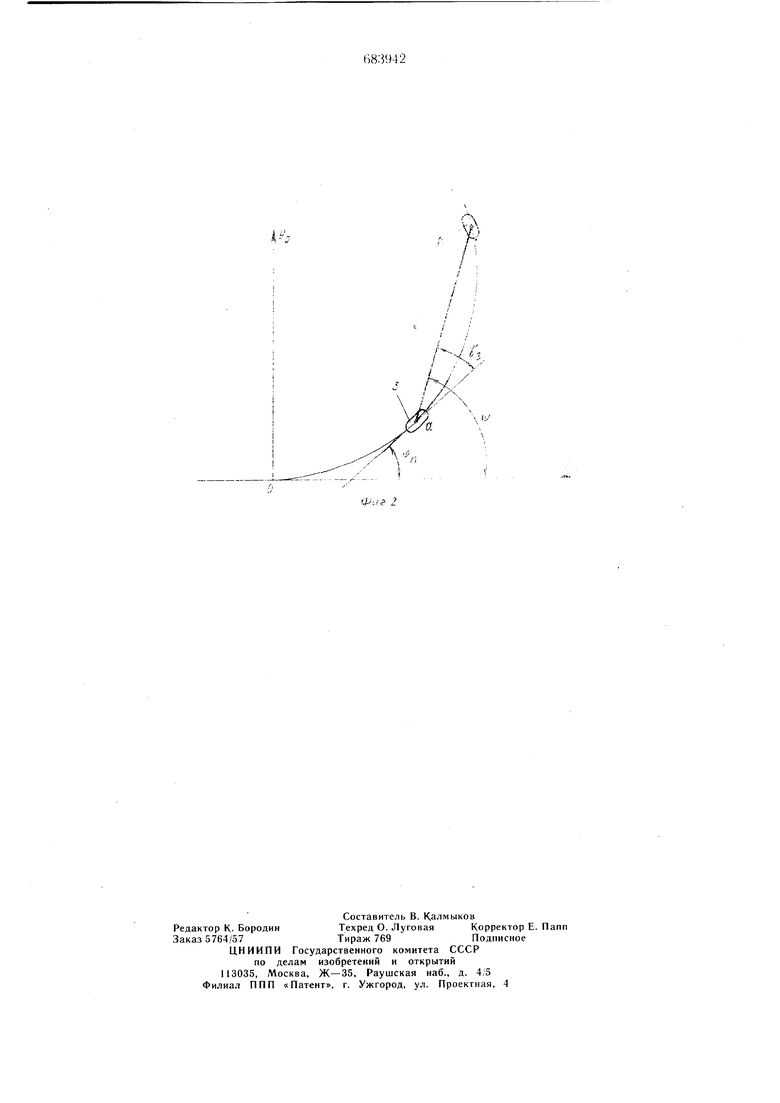
На фиг. 1 изображена принципиальная схема движения одиночного транспортного звена в момент поворота, на фиг. 2 - положение звена после прохождения задними колесами пути запаздывания.
Сигнал, пропорциональный углу поворота колес 1, алгебраически складывают с сигналом,пропорциональным углу поворота рамы 2. Суммарный сигнал задерживают на время, необходимое для прохождения задними колесами 3 пути запаздывания, равного пути до передних колес 1. Из задержанного сигнала алгебраически вычитают сигнал, пропорциональный углу поворота рамы 2 и поворачивают задние колеса 3 на угол, пропорциональпый этому сигналу.
Рассмотрим положение транспортного звена в повороте, в положении, при котором передние колеса 1 наход,ятся в произвольной точке «а траектории. Передние колеса 1 повернуты па угол 5ц относительно рамы 2 и совпадают по паправлению с касательной к траектории.
Угол каклона касательной к первоначальному nanpafkieiiHio Хо будет равен алгебраической сумме:
где Ч - угол поворота рамы звена относительно первоначального направления. Пусть задние колеса 3 движутся по траектории передних колес 1. Тогда, после прохождения пути запаздывания задние колеса расположатся в точке «а траектории и будут повернуты на угол ср„.По справедливо и такое положение; если задние колеса 3 все вре.мя поворачивать на угол «Y, задержанный на время прохождения задними колеса.ми пути
запаздывания, то задние колеса будут двигаться по траектории передних. При этом угол поворота задних колес 3 относительно рамы 2 определится алгебраической разностью:
Jj pn(ti) -Y где: t3 - время задержки,
9п() - задержанный угол ср„ Использование данного способа позволяет создать высокоманевренные транспортные средства, что позволяет в свою очередь транспортировать по существующей дорожной сети крупногабаритные неделимые грузы, т. е. повысить производительность труда и снизить себестоимость транспортировки.
Формула изобретения
Способ управления задними колесами транспортного звена, поворотными относительно рамы звена, заключающийся в том,
что определяют угол поворота передних колес, задерживают сигнал, пропорциональный углу поворота на вре.мя прохождения задними колесами пути запаздывания, равного расстоянию до передних колес, отличающийся тем, что, с целью обеспечения возможности повторения задними колесами траектории движения передних колес, независимо от рельефа дороги и перемены скоростей звена в процессе поворота, перед
задержкой сигнала определяют угол поворота ра.мы звена и поворачивают задние колеса на угол, получепн11 й сложением угла поворота ра.мы звени с углом поворота передних колес и вычитанием из полученного значения, после задержки сигнала, угла поворота рамы звена.
Источники ин(;ормации, принятые во внимание при экспертизе
Х„
