(54) СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ АВТОТРАНСПОРТНОГО ЗВЕНА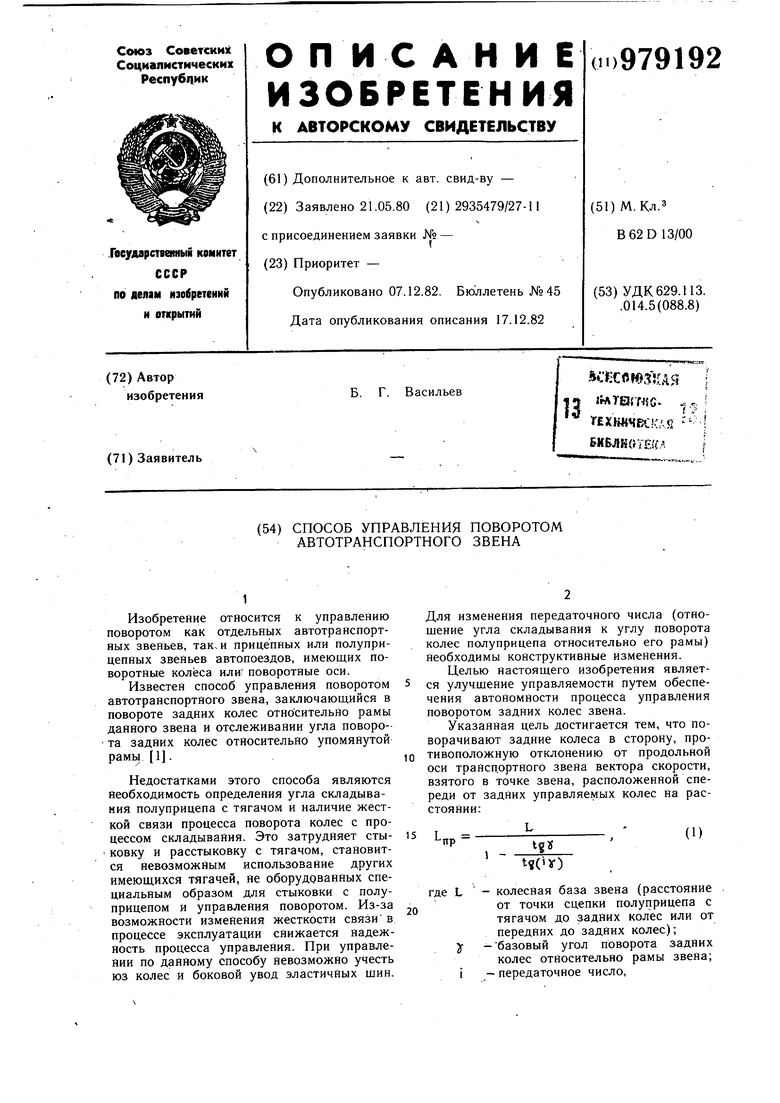
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления поворотом многоосного транспортного средства | 1980 |
|
SU912581A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2613132C2 |
| Устройство для управления колесами звеньев автопоезда | 1977 |
|
SU765083A2 |
| СЕДЕЛЬНО-СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2014 |
|
RU2554717C1 |
| Адаптивная система помощи водителю легкового автомобиля с прицепом при движении задним ходом и способ её использования | 2019 |
|
RU2744641C1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Устройство управления автопоездом | 1988 |
|
SU1655833A1 |
| Устройство для поворота колес полуприцепа транспортного средства | 1978 |
|
SU747764A1 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| Автопоезд | 1988 |
|
SU1676907A1 |
1
Изобретение относится к управлению поворотом как отдельных автотранспортных звеньев, так. и прицепных или полуприцепных звеньев автопоездов, имеющих поворотные колёса или поворотные оси.
Известен способ управления поворотом автотранспортного звена, заключающийся в повороте задних колес относительно рамы данного звена и отслеживании угла поворота задних колес относительно упомянутой рамь 1.
Недостатками этого способа являются необходимость определения угла складывания полуприцепа с тягачом и наличие жесткой связи процесса поворота колес с процессом складывания. Это затрудняет стыковку и расстыковку с тягачом, становится невозможным использование других имеющихся тягачей, не оборудованных специальным образом для стыковки с полуприцепом и управления поворотом. Из-за возможности изменения жесткости связи в процессе эксплуатации снижается надежность процесса управления. При управлении по данному способу невозможно учесть юз колес и боковой увод эластичных щин.
Для изменения передаточного числа (отнощение угла складывания к углу поворота колес полуприцепа относительно его рамы) необходимы конструктивные изменения. Целью Настоящего изобретения является улучщение управляемости путем обеспечения автономности процесса управления поворотом задних колес звена.
Указанная цель достигается тем, что поворачивают задние колеса в сторону, противоположную отклонению от продольной оси транспортного звена вектора скорости, взятого в точке звена, расположенной спереди от задних управляемых колес на расстоянии;
(1)
Lnp
15
tgy
t«(y)
- колесная база звена (расстояние
где L от точки сцепки полуприцепа с
20 тягачом до задних колес или от передних до задних колес);
-базовый угол поворота задних колес относительно рамы звена;
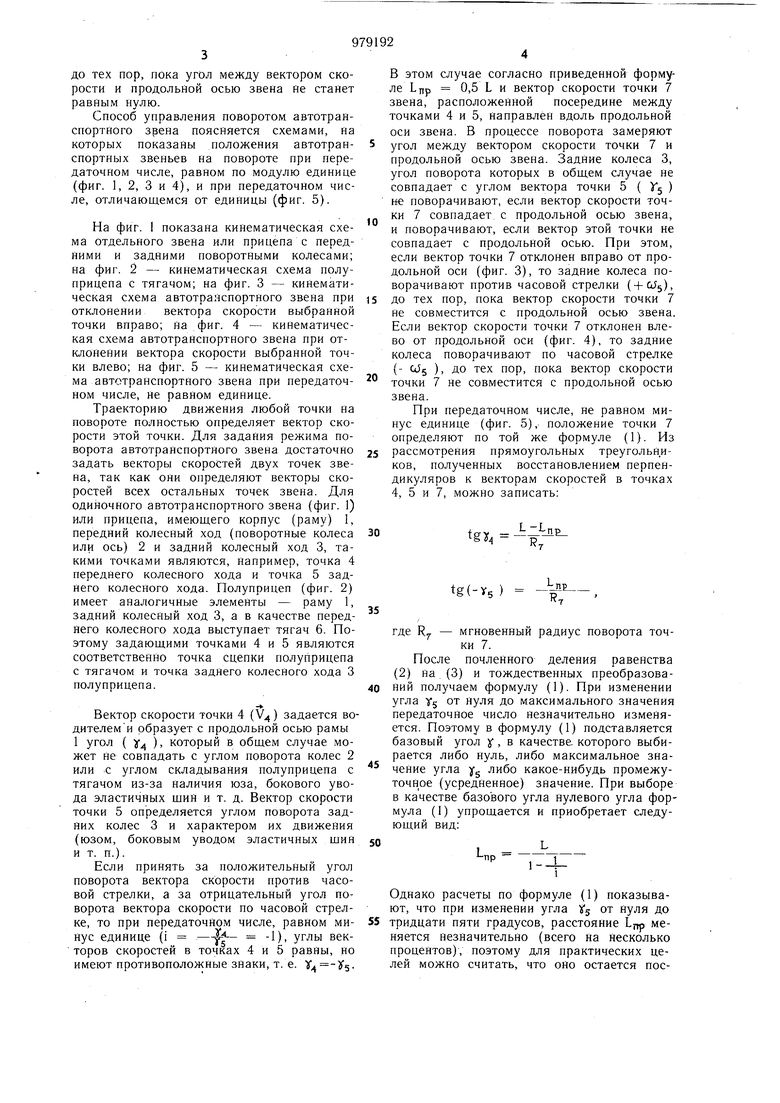
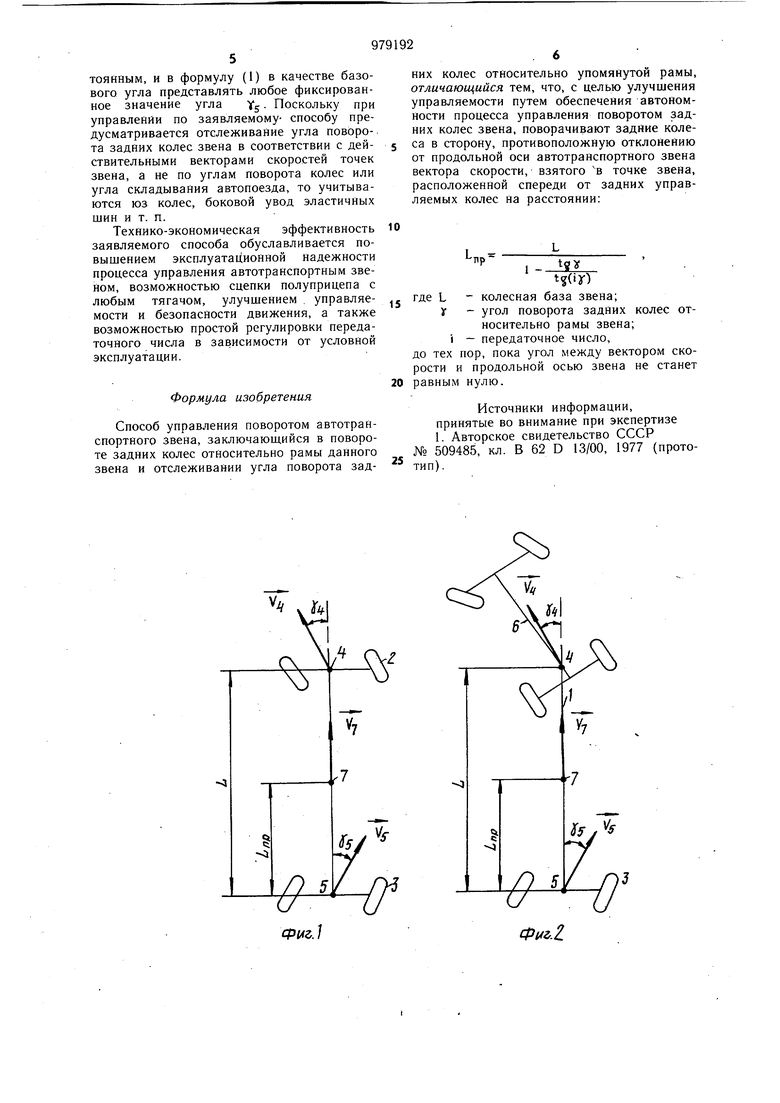
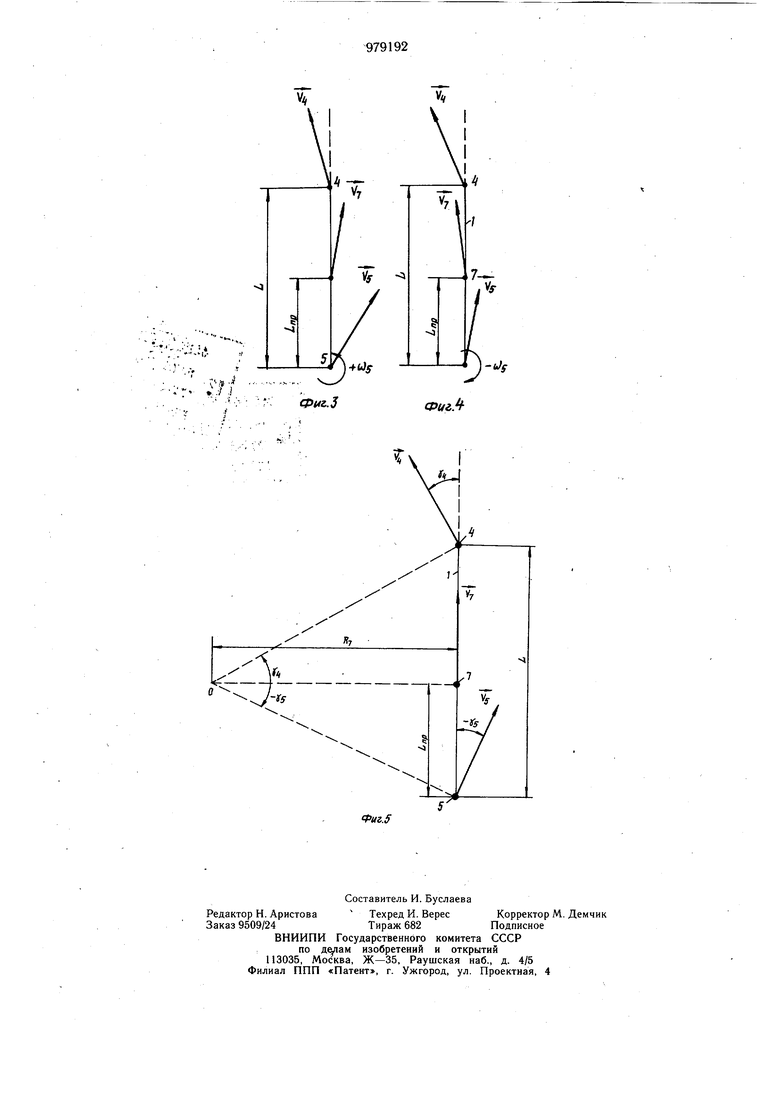
- передаточное число. до тех пор, пока угол между вектором скорости и продольной осью звена не станет равным нулю. Способ управления поворотом автотранспортного арена поясняется схемами, на которых показаны положения автотранспортных звеньев на повороте при передаточном числе, равном по модулю единице (фиг. 1, 2, 3 и 4), и при передаточном числе, отличающемся от единицы (фиг. 5). На фиг. 1 показана кинематическая схема отдельного звена или прицепа с передними и задними поворотными колесами; на фиг. 2 - кинематическая схема полуприцепа с тягачом; на фиг. 3 - кинематическая схема автотранспортного звена при отклонении вектора скорости выбранной точки вправо; на фиг. 4 - кинематическая схема автотранспортного звена при отклонении вектора скорости выбранной точки влево; на фиг. 5 - кинематическая схема автотранспортного звена при передаточном числе, не равном единице. Траекторию движения любой точки на повороте полностью определяет вектор скорости этой точки. Для задания режима поворота автотранспортного звена достаточно задать векторы скоростей двух точек звена, так как они определяют векторы скоростей всех остальных точек звена. Для одиночного автотранспортного звена (фиг. 1) или прицепа, имеющего корпус (раму) 1, передний колесный ход (поворотные колеса или ось) 2 и задний колесный ход 3, такими точками являются, например, точка 4 переднего колесного хода и точка 5 заднего колесного хода. Полуприцеп (фиг. 2) имеет аналогичные элементы - раму 1, задний колесный ход 3, а в качестве переднего колесного хода выступает тягач 6. Поэтому задающими точками 4 и 5 являются соответственно точка сцепки полуприцепа с тягачом и точка заднего колесного хода 3 полуприцепа. Вектор скорости точки 4 (V) задается водителеми образует с продольной осью рамы 1 угол ( Уц ) который в общем случае может не совпадать с углом поворота колес 2 или .с углом складывания полуприцепа с тягачом из-за наличия юза, бокового увода эластичных шин и т. д. Вектор скорости точки 5 определяется углом поворота задних колес 3 и характером их движения (юзом, боковым уводом эластичных щин и т. п.). Если принять за положительный угол поворота вектора скорости против часовой стрелки, а за отрицательный угол поворота вектора скорости по часовой стрелке, то при передаточном числе, равном минус единице (i -1), углы векторов скоростей в точках 4 и 5 равйы, но имеют противоположные знаки, т.е. этом случае согласно приведенной формуле 0,5 L и вектор скорости точки 7 звена, расположенной посередине между точками 4 и 5, направлен вдоль продольной оси звена. В процессе поворота замеряют угол между вектором скорости точки 7 и продольной осью звена. Задние колеса 3, угол поворота которых в общем случае не совпадает с углом вектора точки 5 ( j ) не поворачивают, если вектор скорости точки 7 совпадает с продольной осью звена, и поворачивают, если вектор этой точки не совпадает с продольной осью. При этом, если вектор точки 7 отклонен вправо от продольной оси (фиг. 3), то задние колеса поворачивают против часовой стрелки ( + cj). до тех пор, пока вектор скорости точки 7 не совместится с продольной осью звена. Если вектор скорости точки 7 отклонен влево от продольной оси (фиг. 4), то задние колеса поворачивают по часовой стрелке (- cjj ), до тех пор, пока вектор скорости точки 7 Не совместится с продольной осью звена. При передаточном числе, не равном минус единице (фиг. 5), положение точки 7 определяют по той же формуле (1). Из рассмотрения прямоугольных треугольников, полученных восстановлением перпендикуляров к векторам скоростей в точках 4, 5 и 7, можно записать: „ inp tg(-y5 ) где R - мгновенный радиус поворота точки 7. После почленного деления равенства (2) на (3) и тождественных преобразоваНИИ получаем формулу (1). При изменении угла Yg от нуля до максимального значения передаточное число незначительно изменяется. Поэтому в формулу (1) подставляется базовый угол jj, в качестве которого выбирается либо нуль, либо максимальное значение угла Уд либо какое-нибудь промежуточцое (усредненное) значение. При выборе в качестве базового угла нулевого угла формула (1) упрощается и приобретает следующий вид: Однако расчеты по формуле (1) показывают, что при изменении угла 5 от нуля до тридцати пяти градусов, расстояние Lj,p меняется незначительно (всего на несколько процентов), поэтому для практических можно считать, что оно остается постоянным, и в формулу (1) в качестве базового угла представлять любое фиксированное значение угла YS Поскольку при управлении по заявляемому- способу предусматривается отслеживание угла поворота задних колес звена в соответствии с действительными векторами скоростей точек звена, а не по углам поворота колес или угла складывания автопоезда, то учитываются юз колес, боковой увод эластичных шин и т. п.
Технико-экономическая эффективность заявляемого способа обуславливается повышением эксплуатационной надежности процесса управления автотранспортным звеном, возможностью сцепки полуприцепа с любым тягачом, улучшением . управляемости и безопасности движения, а также возможностью простой регулировки передаточного числа в зависимости от условной эксплуатации.
Формула изобретения
Способ управления поворотом автотранспортного звена, заключающийся в повороте задних колес относительно рамы данного звена и отслеживании угла поворота задНих колес относительно упомянутой рамы, отличающийся тем, что, с целью улучшения управляемости путем обеспечения автономности процесса управления поворотом задних колес звена, поворачивают задние колеса в сторону, противоположную отклонению от продольной оси автотранспортного звена вектора скорости, взятого в точке звена, расположенной спереди от задних управляемых колес на расстоянии:
лр
1 - gy
t(in
-колесная база звена;
где L У
-угол поворота задних колес относительно рамы звена;
i - передаточное число, до тех пор, пока угол между вектором скорости и продольной осью звена не станет равным нулю.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 509485, кл. В 62 D 13/00, 1977 (прототип).
V
С/ Ф1лг. 1
и
,.2.
J7/
Фиг..З
Фиг.
