(54) ЭЛЕКТРОМАГНИТНЫЙ ОРИЕНТАТОР
1
Изобретение относится к средствам неразрушающего контроля и может быть использовано для соосного размещения , измерительных преобразователей, например, акустического теневого дефектоскопа, наложенных по разные стороны крупногабаритного непрозрачного, непроводящего изделия.
Известна система ориентации, содержащая два накладных корпуса, в одном из которых размещен соленоид, во-втором i- система взаимно перпендикулярных преобразователей поля соленоида, генератор переменного тока, нагруженный на соленоид, и схему обработки и представления информации 1.Известен также электромагнитный ориентатор, содержащий дополнительно дизъюиктор и управляемый аттенюатор 2.
Общим недостатком указанных устройств является то, что они обеспечивают совмещение продольных осей преобразователей лишь в случае их параллельности и поэтому Могут быть использованы только на плоских объектах контроля.
Наиболее близким к предлагаемому является электромагнитный ориентатор преобразователей дефектоскопа, содержащий два корпуса и два, размещенных в них и связанных с ними щаровыми щарнирами каркаса, источник аксиального магнитного поля, установленный в одном из корпусрв, систему из двух взаимно перпендикулярных основных радиальных индукционных, преобразователей поля и одного аксиального преобразователя, поля, размещенных во вторых корпусе и каркасе, генератор переменного тока, связанный с источником аксиального маг10нитного поля, и блок измерения с блоком индикации на выходе 3.
Использование гравитационного поля земли позволяет с помощью ориентатора выполнить условия параллельности продольных
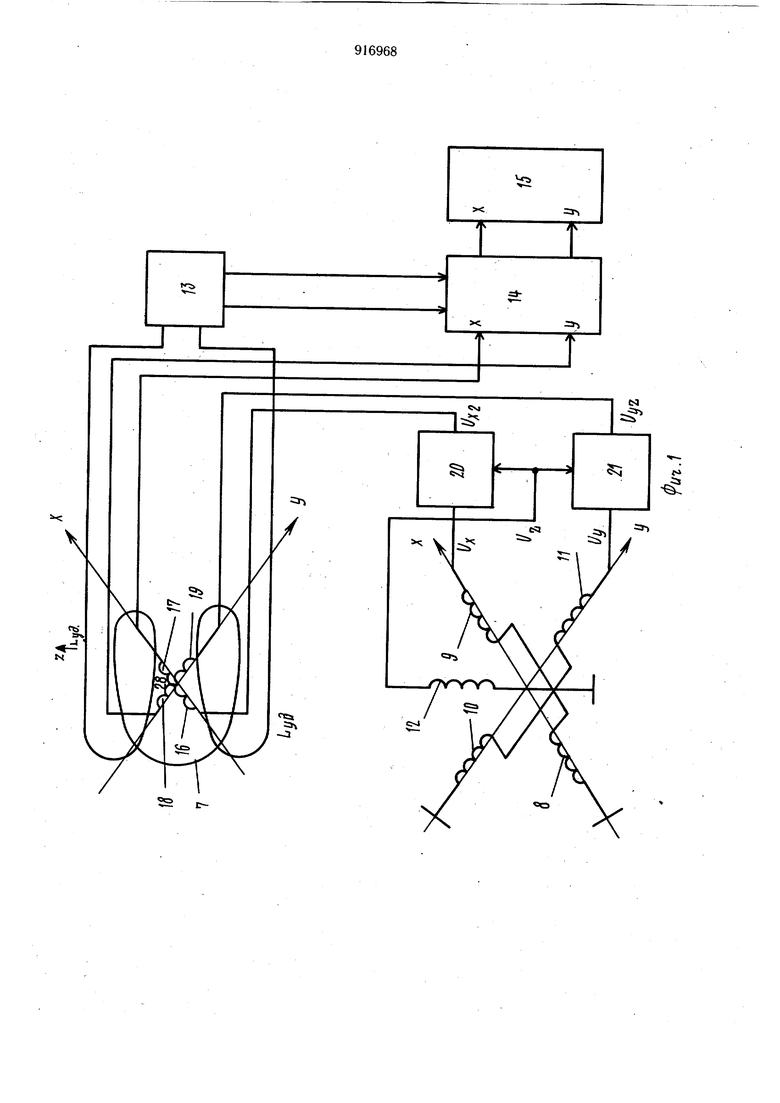
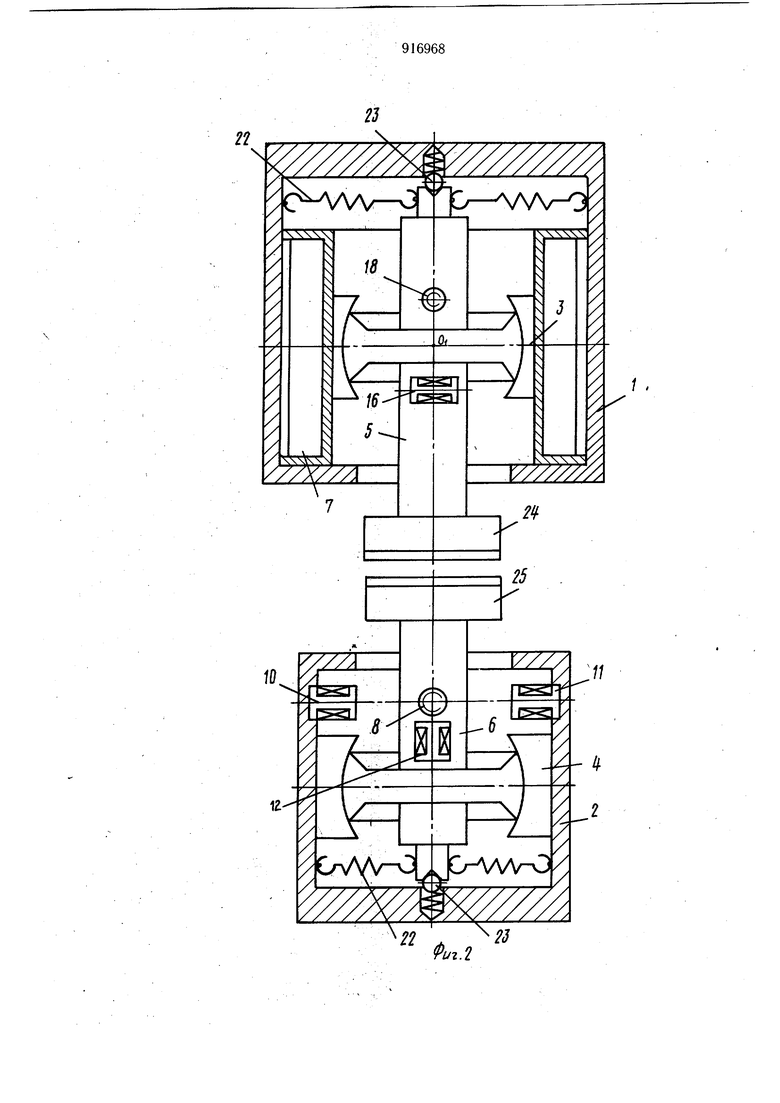
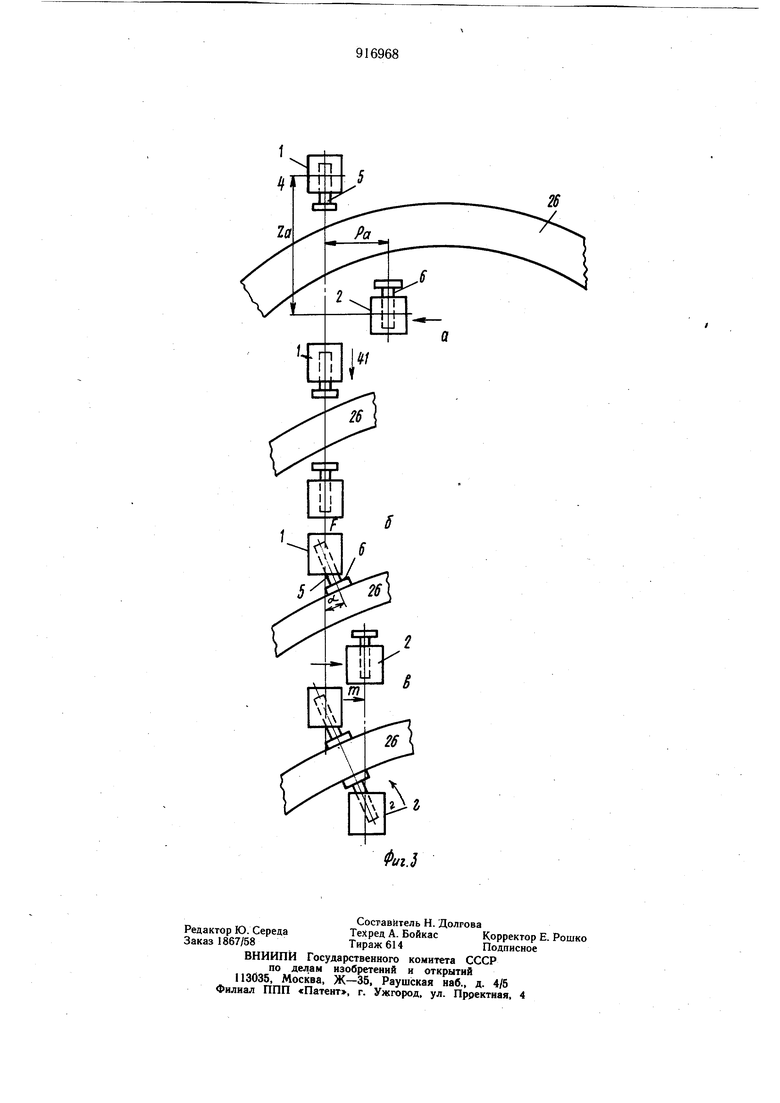
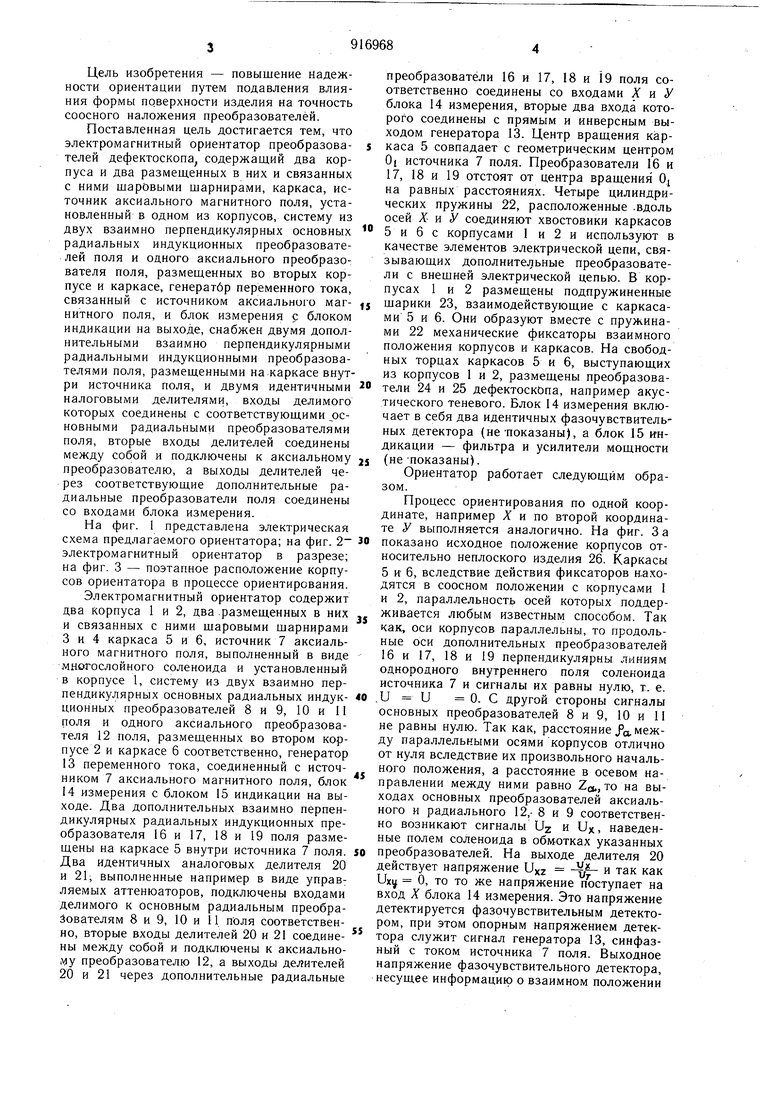
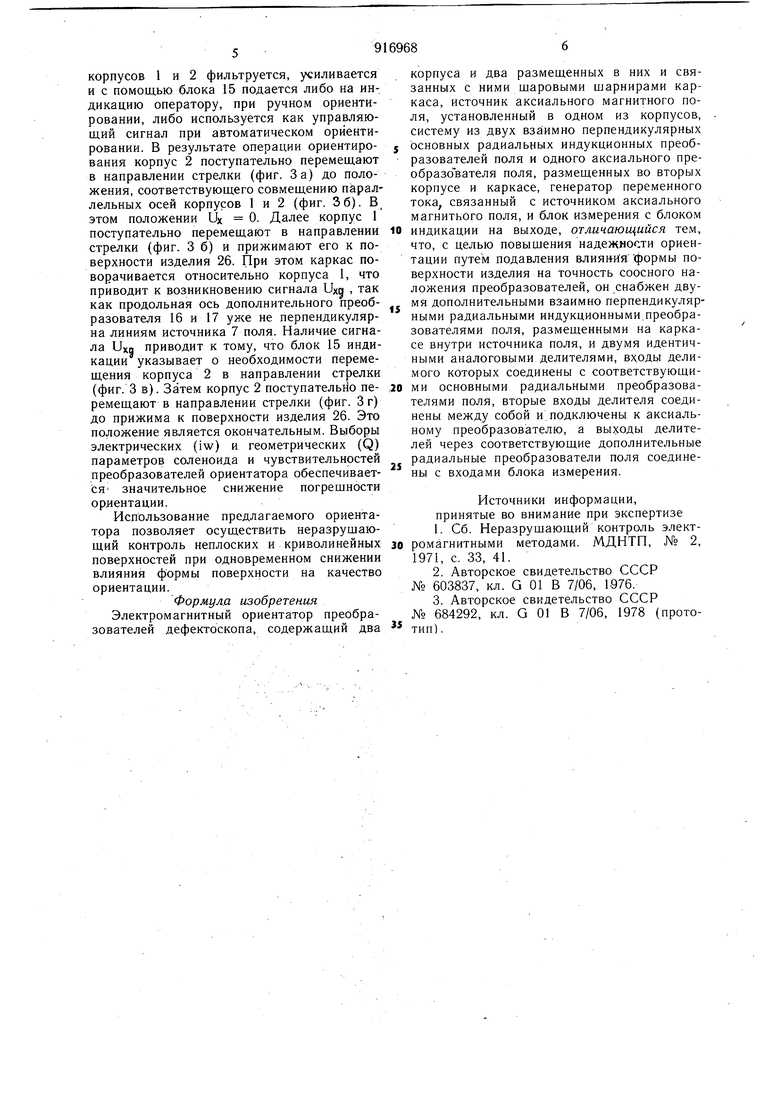
15 осей преобразователей и без контакта с поверхностями объекта контроля, однако положение этих осей в пространстве может быть только вертикальным. Это обстоятельство позволяет производить контроль или размет20ку поверхностей только в вертикальных подожениях, но не позволяет соосно наложить преобразователи средств неразрушающего контроля на криволинейные поверхности контролируемого изделия. Цель изобретения - повышение надежности ориентации путем подавления влияния формы поверхности изделия на точность соосного наложения преобразователей. Поставленная цель достигается тем, что электромагнитный ориентатор преобразователей дефектоскопа, содержащий два корпуса и два размещенных в них и связанных с ними щарОвыми щарнирами, каркаса, источник аксиального магнитного поля, установленный в одном из корпусов, систему из двух взаимно перпендикулярных основных радиальных индукционных преобразователей поля и одного аксиального преобразователя поля, размещенных во вторых корпусе и каркасе, генератбр переменного тока, связанный с источником аксиального магнитного поля, и блок измерения с блоком индикации на выходе, снабжен двумя дополнительными взаимно перпендикулярными радиальными индукционными преобразователями поля, размещенными на каркасе внутри источника поля, и двумя идентичными налоговыми делителями, входы делимого которых соединены с соответствующими основными радиальными преобразователями поля, вторые входы делителей соединены между собой и подключены к аксиальному преобразователю, а выходы делителей через соответствующие дополнительные радиальные преобразователи поля соединены со входами блока измерения. На фиг. 1 представлена электрическая схема предлагаемого ориентатора; на фиг. 2 электромагнитный ориентатор в разрезе; на фиг. 3 - поэтапное расположение корпусов ориентатора в процессе ориентирования. Электромагнитный ориентатор содержит два корпуса 1 и 2, два .размещенных в них и связанных с ними щаровыми щарнирами 3 и 4 каркаса 5 и 6, источник 7 аксиального магнитного поля, выполненный в виде многослойного соленоида и установленный в корпусе 1, систему из двух взаимно перпендикулярных основных радиальных индукционных преобразователей 8 и 9, 10 и 11 поля и одного аксиального преобразователя 12 поля, размещенных во втором корпусе 2 и каркасе 6 соответствен.чо, генератор 13переменного тока, соединенный с источником 7 аксиального магнитного поля, блок 14измерения с блоком 15 индикации на выходе. Два дополнительных взаимно перпендикулярных радиальных индукционных преобразователя 16 и 17, 18 и 19 поля размещены на каркасе 5 внутри источника 7 поля, Два идентичных аналоговых делителя 20 и 21, выполненные например в виде управ: ляемых аттенюаторов, подключены входами делимого к основным радиальным преобразователям 8 и 9, 10 и II поля соответственно, вторые входы делителей 20 и 21 соединены между собой и подключены к аксиальному преобразователю 12, а выходы делителей 20 и 21 через дополнительные радиальные преобразователи 16 и 17, 18 и 19 поля соответственно соединены со входами X и У блока 14 измерения, вторые два входа которого соединены с прямым и инверсным выходом генератора 13. Центр вращения каркаса 5 совпадает с геометрическим центром 0| источника 7 поля. Преобразователи 16 и 17, 18 и 19 отстоят от центра вращения Oj на равных расстояниях. Четыре цилиндрических пружины 22, расположенные .вдоль осей Х- и У соединяют хвостовики каркасов 5 и 6 с корпусами 1 и 2 и используют в качестве элементов электрической цепи, связывающих дополнительные преобразователи с внещней электрической цепью. В корпусах 1 и 2 размещены подпружиненные щарики 23, взаимодействующие с каркасами 5 и 6. Они образуют вместе с пружинами 22 механические фиксаторы взаимного положения корпусов и каркасов. На свободных торцах каркасов 5 и 6, выступающих из корпусов 1 и 2, размещены преобразователи 24 и 25 дефектоскопа, например акустического теневого. Блок 14 измерения включает в себя два идентичных фазочувствительных детектора (непоказаны), а блок 15 индикации - фильтра и усилители мощности (не показаны). Ориентатор работает следующим образом. Процесс ориентирования по одной координате, например X и по второй координате У выполняется аналогично. На фиг. 3 а показано исходное положение корпусов относительно неплоского изделия 26. Каркасы 5 и 6, вследствие действия фиксаторов н.аходятся в соосном положении с корпусами 1 и 2, параллельность осей которых поддерживается любым известным способом. Так как, оси корпусов параллельны, то продольные оси дополнительных преобразователей 16 и 17, 18 и 19 перпендикулярны линиям однородного внутреннего поля соленоида источника 7 и сигналы их равны нулю, т. е. .и - и 0. С другой стороны сигналы основных преобразователей 8 и 9, 10 и II не равны нулю. Так как, расстояние Jo, между параллельными осями корпусов отлично от нуля вследствие их произвольного начального положения, а расстояние в осевом направлении между ними равно ZQ,, то на выходах основных преобразователей аксиального и радиального 12,- 8 и 9 соответственно возникают сигналы Uz и Ux, наведенные полем соленоида в обмотках указанных преобразователей. На выходе делителя 20 действует напряжение Uxz и так как Uxt О, то то же напряжение поступает на вход X блока 14 измерения. Это напряжение детектируется фазочувствительным детектором, при этом опорным напряжением детектора служит сигнал генератора 13, синфазный с током источника 7 поля. Выходное напряжение фазочувствительного детектора, несущее информацию о взаимном положении
корпусов 1 и 2 фильтруется, усиливается и с помощью блока 15 подается либо на индикацию оператору, при ручном ориентировании, либо используется как управляющий сигнал при автоматическом ориентировании. В результате операции ориентирования корпус 2 поступательно перемещают в направлении стрелки (фиг. За) до положения, соответствующего совмещению параллельных осей корпусов 1 и 2 (фиг. 36). В, этом положении Ux 0. Далее корпус 1 поступательно перемещают в направлении стрелки (фиг. 3 б) и прижимают его к поверхности изделия 26. При этом каркас поворачивается относительно корпуса 1, что приводит к возникновению сигнала Uxg , так как продольная ось дополнительного преобразователя 16 и 17 уже не перпендикулярна линиям источника 7 поля. Наличие сигнала UXD приводит к тому, что блок 15 индикации указывает о необходимости перемещения корпуса 2 в направлении стрелки (фиг. 3 в). Затем корпус 2 поступательно перемещают в направлении стрелки (фиг. 3 г) до прижима к поверхности изделия 26. Это положение является окончательным. Выборы электрических (iw) и геометрических (Q) параметров соленоида и чувствительностей преобразователей ориентатора обеспечивается значительное снижение погрешности ориентации.
Использование предлагаемого ориентатора позволяет осуществить неразрушающий контроль неплоских и криволинейных поверхностей при одновременном снижении влияния формы поверхности на качество ориентации.
Формула изобретения
Электромагнитный ориентатор преобразователей дефектоскопа, содержащий два
корпуса и два размещенных в них и связанных с ними шаровыми щарнирами каркаса, источник аксиального магнитного поля, установленный в одном из корпусов, систему из двух взаимно перпендикулярных
5 основных радиальных индукционных преобразователей поля и одного аксиального преобразоТвателя поля, размещенных во вторых корпусе и каркасе, генератор переменного тока, связанный с источником аксиального магнитного поля, и блок измерения с блоком
0 индикации на выходе, отличающийся тем, что, с целью повышения надежности ориентации путем подавления влияния формы поверхности изделия на точность соосного наложения преобразователей, он снабжен двумя дополнительными взаимно перпендикулярными радиальными индукционными.преобразователями поля, размещенными на каркасе внутри источника поля, и двумя идентичными аналоговыми делителями, входы делимого которых соединены с соответствующими основными радиальными преобразователями поля, вторые входы делителя соединены между собой и подключены к аксиальному преобразователю, а выходы делителей через соответствующие дополнительные радиальные преобразователи поля соединены с входами блока измерения.
Источники информации, принятые во внимание при экспертизе
1.Сб. Неразрушающий контроль электромагнитными методами. МДНТП, № 2,
1971, с. 33, 41.
2.Авторское свидетельство СССР № 603837, кл. G 01 В 7/06, 1976.
3.Авторское свидетельство СССР
№ 684292, кл. G 01 В 7/06, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электромагнитный толщиномер | 1986 |
|
SU1379606A1 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1610240A2 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ФЕРРОМАГНИТНЫХ ЧАСТИЦ В ЖИДКОСТИ | 1994 |
|
RU2090860C1 |
| Цифровой электромагнитный толщиномер | 1988 |
|
SU1839228A1 |
| ВИХРЕТОКОВЫЙ ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1995 |
|
RU2090882C1 |
| Цифровой электромагнитный толщиномер | 1984 |
|
SU1252656A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК, СИСТЕМА КОНТРОЛЯ И СПОСОБ ВЫЯВЛЕНИЯ ОТКЛОНЕНИЙ ОТ НОРМЫ В ЭЛЕКТРОПРОВОДНЫХ МАТЕРИАЛАХ | 2013 |
|
RU2606695C2 |
| Устройство для неразрушающего контроля крупногабаритных цилиндрических изделий | 1986 |
|
SU1415162A1 |
| Цифровой электромагнитный толщиномер | 1976 |
|
SU654850A1 |