Область техники, к которой относится изобретение, и уровень техники
[0001] Настоящее изобретение относится к дифференциальному датчику, системе контроля и способу выявления отклонений от нормы в электропроводных материалах.
[0002] Неразрушающее выявление отклонений от нормы в материалах имеет сегодня большое значение. К отклонениям от нормы относятся такие, например, дефекты, как трещины, вкрапления примесей или иные неоднородности материала, к примеру, местные неоднородности электропроводности. Большой спрос на материалы с высоким коэффициентом удельной нагрузки требует материалов особо высокого качества. Для снижения стоимости и обеспечения качества каждого изготавливаемого изделия все больше применяются неразрушающие способы выявления и локализации дефектов, а также определения параметров материалов. Особую роль в промышленности играют металлические материалы, поэтому неразрушающие исследования электропроводных материалов являются объектом изучения, разработок и внедрения.
[0003] В настоящее время имеется много разнообразных способов неразрушающего контроля (NDT - от англ. «non-destructive testing») материалов, применяемых в зависимости от вида испытуемого образца и искомых свойств исследуемого материала. Согласно докладу Т. Aastroem'a «From Fifteen to Two Hundred NDT-Methods in Fifty Years» («От четырнадцати к двумстам способам неразрушающего контроля за пятьдесят лет»), опубликованному в: 17th World Conference on Nondestructive Testing (Трудах 17-й Международной конференции по неразрушающему контролю), 2008, из уровня техники известно более 200 способов неразрушающего контроля.
[0004] В части выявления отклонений от нормы в электропроводных материалах особенно хорошо зарекомендовали себя электромагнитные методы. Однако существующие методы несколько ограниченны в плане разрешения, глубины проникновения и времени прохода или скорости контроля. Кроме того, есть потребность и в повышении вероятности идентификации дефекта как такового.
[0005] Расположение датчиков в виде более или менее многосоставной матрицы датчиков дает возможность реконструировать дефекты с помощью соответствующих алгоритмов. Но такое расположение предполагает компактную конструкцию датчиков.
[0006] Индукционная дефектоскопия (ECT - от англ. «eddy current testing») хорошо зарекомендовала себя при контроле электропроводных материалов во многих областях применения, например, при автоматизированном неразрушающем контроле заготовок в металлообрабатывающей промышленности и производстве металлоизделий, при контроле обеспечивающих безопасность и функционально критических деталей наземных и воздушных транспортных средств, а также в производстве контактных элементов.
[0007] Обычный, оснащенный катушками индукционный датчик содержит одну или более полюсных катушек (или катушек возбуждения), которые для проведения контроля подключаются к источнику переменного напряжения, после чего могут создавать переменное электромагнитное поле (первичное поле), проникающее при контроле в проверяемый материал и индуцирующее, в основном, в приповерхностном слое проверяемого материала вихревые токи, а последние, в результате взаимоиндукции, оказывают реактивное воздействие на одну или более измерительных катушек (или приемных катушек) индукционного зонда. Дефект в проверяемой зоне, например, трещина, вкрапление примеси или иная неоднородность материала, мешает распространению вихревых токов в проверяемом материале и, таким образом, изменяет их интенсивность, а тем самым и интенсивность оказывающего реактивное воздействие вторичного магнитного поля. Вызванные этим изменения электрических свойств измерительной катушки, например полного сопротивления, создают электрические измерительные сигналы в виде изменений электрических напряжений, и эти сигналы могут быть оценены устройством оценки для идентификации и описания дефекта. Индукционные датчики могут использоваться и для контроля или промера бездефектных материалов, например, для измерений электропроводности или магнитной проницаемости.
[0008] Индукционный контроль позволяет осуществлять дефектоскопию приповерхностных слоев на высоком уровне чувствительности и разрешения локализации. В особенности высокое разрешение локализации при высокой скорости контроля показала, так называемая, «динамическая промышленная дистанционная индукционная дефектоскопия» (motion induced remote field eddy current testing), описанная в статье Sun, Y., Udpa, S., Lord, W., Udpa, L. и Ouyang, T. «Application of Motion Induced Remote-Field Eddy Current Effect to Online Inspection and Quality Examination of Rolling Metallic Strips» (Применение динамической промышленной дистанционной индукционной дефектоскопии при проверке и контроле качества полосового металлопроката в режиме реального времени), опубликованной в Трудах конференции AIP Conf. Proc. 557 (2001), с. 1541-1548.
[0009] Также высокую чувствительность выявления отклонений от нормы в исследуемом материале демонстрируют методы визуализации, например, описанные в статье Mook, G., Michel, F. и Simonin, J. «Elektromagnetic Imaging Using Probe Arrays» (Электромагнитное формирование изображений с применением детекторных матриц), опубликованной в журнале Strojnioki vestnik - Journal of Mecanical Engineering 57 (2011) 3, c. 227-236.
[0010] Использование переменных магнитных полей для создания проникающего в материал испытуемого образца первичного магнитного поля имеет недостаток частотно-ограниченной глубины проникновения в исследуемый материал. Поэтому, как правило, глубоколежащие аномалии и глубинные части аномалий типа надрезов определяются недостаточно хорошо, когда их глубина превышает утроенную глубину проникновения (см. статью Mook, G., Hesse, О. и Uchanin, V. «Deep Penetrating eddy currents and Probes» (Вихревые токи и зонды глубокого проникновения) в Трудах 9-й Европейской конференции по неразрушающему контролю, 9th European Conference on Non-Destructive-Testing, 2006). Наблюдения показали, однако, что такие системы датчиков могут создавать проблемы даже при определении аномалий на глубине, примерно равной глубине проникновения. Зависящей от частоты глубине проникновения соответствует и разрешение локализации применяемой системы датчиков. Для выявления глубинных аномалий необходима пониженная частота. Соответственно, тогда возможны лишь пониженные скорости контроля, вследствие чего возрастает время прохода исследуемого объекта через систему датчиков.
[0011] Существует множество документов, описывающих способы и датчики для выявления дефектов, при котором реализуется относительное движение датчика и исследуемого материала.
[0012] В статье Sun, Y., Kang, Y. и Quio, С. «А new NDT method based on permanent magnetic field pertubation» (Новый способ неразрушающего контроля на основе возмущения постоянного магнитного поля), опубликованной в журнале NDT & Е International 44 (2011) с. 1-7, описан способ неразрушающего контроля ферромагнитных материалов с использованием потока рассеяния. Постоянный магнит, ориентированный перпендикулярно поверхности проверяемого элемента, обмотан приемной катушкой. При этом можно наблюдать, так называемый, PMFP-эффект (эффект возмущения постоянного магнитного поля), когда магнит в такой перпендикулярной ориентации проводят вдоль поверхности испытуемого образца на определенном расстоянии от этой поверхности. Способ должен обеспечивать возможность с достаточной чувствительностью выявлять дефекты различных ориентаций в ферромагнитных материалах.
[0013] В патенте US 7023205 В1 раскрыт индукционный датчик, способный обнаруживать электропроводные детали сквозь электропроводящие экраны. Этот датчик содержит постоянный магнит, обмотанный катушкой. Индукционный датчик можно установить на наружной стороне кожуха турбины или другой установки с вращающимися элементами для замера сквозь кожух свойств движущихся вдоль кожуха с его внутренней стороны электропроводных элементов, например, турбинных лопаток.
[0014] В документе WO 00/58695 раскрыт способ измерения параметров металлических объектов, в котором определяется действующая на металлический объект сила. При этом под металлическим объектом подразумевается как расплавленный металл, так и твердое металлическое тело конечных размеров.
[0015] В патенте US 6002251 раскрыто сенсорное устройство для «дистанционных» измерений с применением индукционных датчиков, причем реализуется местное разделение катушек возбуждения и приемных катушек, а также магнитное экранирование системы возбуждения.
[0016] В документе WO 2007/053519 А2 раскрыто выявление дефектов с использованием силы торможения, действующей на магнит, движущийся относительно испытуемого объекта.
[0017] В последние годы в Техническом университете Ильменау был разработан способ нового типа бесконтактного неразрушающего контроля материалов, известный под названием «Индукционная дефектоскопия с использованием силы Лоренца» (Lorentz Force Eddy Current Testing, LET). Основные принципы способа раскрыты, например, в статье Brauer, Н., Ziolkowski, М. «Eddy Current Testing of Metallic Sheets with Defects Using Force Measurements» (Индукционная дефектоскопия металлических листов с дефектами, использующая измерение силы), опубликованной в журнале Serbian Journal of Electrical Engineering 2008, 5, с. 11-20. При относительном движении металлического испытуемого образца и постоянного магнита, в испытуемом образце индуцируются вихревые токи, в свою очередь вызывающие возникновение силы Лоренца, которая оказывает соответствующее реактивное воздействие на магнитную систему. При этом неоднородность электропроводности материала испытуемого образца, вызванная, например, трещиной или другим дефектом, проявляет себя в изменении силы Лоренца, которое может быть обнаружено датчиком силы на магнитной системе. Индукционная дефектоскопия с использованием силы Лоренца позволяет выявлять более глубоко залегающие дефекты на основе замеров сил Лоренца, действующих на магнитную систему.
[0018] В документе DE 102011056650 А1 раскрыты способ и устройство для определения электропроводности материала на основе индукционной дефектоскопии с использованием силы Лоренца. При этом используется тот факт, что сила Лоренца включает несколько силовых воздействий в различных направлениях. Замеряется первое силовое воздействие и действующее в другом направлении второе силовое воздействие - и соответствующие показатели рассчитываются совместно посредством составления отношений. Этот способ может использоваться и для локализации неоднородностей в материале.
[0019] Несмотря на большое разнообразие существующих систем датчиков для неразрушающего контроля материалов, тем не менее сохраняется потребность в датчиках и системах датчиков, позволяющих надежно и с высокой чувствительностью выявлять аномалии. В особенности, выявление глубоколежащих аномалий в исследуемом материале с высокой скоростью контроля по-прежнему представляет проблему, не нашедшую удовлетворительного решения.
Техническая задача и техническое решение
[0020] Задача настоящего изобретения заключается в том, чтобы предложить дифференциальный датчик, систему контроля и способ выявления отклонений от нормы в электропроводных материалах, позволяющие с высокой чувствительностью и малым процентом ошибок обнаружения выявлять отклонения от нормы даже при высоких скоростях контроля, причем с возможностью выявления и глубоколежащих отклонений от нормы в исследуемом материале.
[0021] Решение этой и других задач достигается предложением дифференциального датчика с признаками по пункту 1 формулы изобретения. Далее, предлагается система контроля с признаками по пункту 6 формулы изобретения. Далее, решение задачи достигается способом выявления отклонений от нормы в электропроводных материалах, - способом с признаками по пункту 13 формулы изобретения, который может быть реализован с применением указанного датчика и/или указанной системы контроля.
[0022] Дальнейшие предпочтительные разработки раскрыты в зависимых пунктах формулы изобретения. Точный текст всей формулы изобретения дается со ссылкой на содержание настоящего описания.
[0023] Согласно одному аспекту настоящего изобретения обеспечивается дифференциальный датчик для выявления отклонений от нормы в электропроводных материалах. В целях создания вихревых токов в проверяемом материале датчик содержит (по меньшей мере) один постоянный магнит. Применяя постоянный магнит вместо питаемой переменным током катушки возбуждения, можно увеличить глубину проникновения (первичного) магнитного поля в материал. Это позволяет выявлять и аномалии, лежащие глубоко под поверхностью материала.
[0024] Для выработки сигналов датчик содержит первую катушку с одной или более первыми обмотками, навитыми вокруг постоянного магнита и определяющими первую ось катушек, и вторую катушку с одной или более вторыми обмотками, навитыми вокруг постоянного магнита и определяющими вторую ось катушек, причем вторая ось катушек поперечна первой оси катушек. Таким образом, оси катушек не параллельны, а расположены под некоторым конечным углом друг к другу. При этом понятие «ось катушек» обозначает направление, идущее, по существу, перпендикулярно плоскости обмотки, определяемой расположением витков. Ориентации катушек могут также быть определены перпендикулярными к соответственным осям катушек плоскостями катушек, которые также перпендикулярны друг к другу.
[0025] Созданное индуцированными вихревыми токами вторичное магнитное поле взаимодействует с первичным магнитным полем постоянного магнита. И когда при указанном относительном движении аномалия проходит сквозь зону, на которую оказывает влияние первичное магнитное поле, эта аномалия возмущает вторичное магнитное поле, и, вследствие связанного с этим изменения магнитного потока, в каждой из (по меньшей мере) двух катушек индуцируется электрическое напряжение.
[0026] В связи с этим понятие «дифференциальный датчик» описывает способность датчика регистрировать временные изменения магнитного потока Ф по индуцированным в обмотках или в катушках электрическим напряжениям. Это изменение со временем t можно описать дифференциальным выражением dФ/dt, поэтому датчик называется «дифференциальным датчиком». «Дифференциальный» датчик отличается от известных дифференциальных индукционных зондов, помимо прочего, тем, что в дифференциальном индукционном зонде катушки с параллельными осями включаются попарно дифференциально относительно друг друга (например, посредством намотки навстречу друг другу) для получения разностного сигнала, тогда как катушки «дифференциального датчика» включаются не дифференциально, а вырабатывают независимые друг от друга сигналы, которые и оценены могут быть независимо друг от друга.
[0027] Предусматриваются, по меньшей мере, две различные катушки (первая катушка и вторая катушка), оси которых идут не параллельно друг другу, а поперечно, поэтому временные изменения магнитного потока могут быть определены раздельно для нескольких пространственных направлений. Наличие двух (или большего числа) катушек с непараллельными осями позволяет независимо определять компоненты изменения магнитного потока по нескольким пространственным направлениям. С учетом этой функциональности предлагаемый датчик может быть назван и «многокомпонентным датчиком», при этом понятие «компоненты» здесь относится к компонентам изменения магнитного потока в различных пространственных направлениях.
[0028] Было обнаружено, что такой многокомпонентный датчик может снизить вероятность ошибочных сигналов, по сравнению с соответствующими датчиками, содержащими только одну катушку, поскольку появляется возможность регистрировать изменения магнитного потока одновременно по нескольким пространственным направлениям. Благодаря этому можно по сигналам датчика отличать «истинные дефекты» - такие, например, как трещины или раковины, - от псевдодефектов, например, вызывающих значимые изменения магнитного потока только в одной из катушек.
[0029] Для многомерной регистрации изменений магнитного потока может быть достаточно двух катушек, однако в одном из предпочтительных вариантов осуществления предусмотрена третья катушка с одной или более третьими обмотками, навитыми вокруг постоянного магнита и определяющими третью ось катушек, идущую поперек первой оси катушек и второй оси катушек. Это позволяет еще точнее разложить временные изменения магнитного потока по различным пространственным направлениям, или компонентам. Предпочтительно датчик содержит ровно три несоосные катушки.
[0030] В предпочтительном варианте осуществления оси катушек ориентированы перпендикулярно друг другу, благодаря чему возможно разделение общего изменения магнитного потока на компоненты по трем осям декартовой системы координат. Возможно также сориентировать относительно друг друга первую катушку, вторую катушку и, при необходимости, третью катушку так, чтобы оси катушек составляли друг с другом другой угол, например 60° или 30° и т.п.
[0031] Предпочтительны, как правило, такие варианты осуществления, в которых первая катушка, вторая катушка и/или третья катушка закреплена (закреплены) на постоянном магните. Механически неподвижное соединение постоянного магнита с катушками исключает смещение относительно друг друга постоянного магнита и катушек, так что первичное магнитное поле постоянного магнита не может в процессе работы индуцировать в катушках напряжений, и поэтому все наведенные в катушках напряжения вызваны исключительно вторичным магнитным полем, созданным индуцированными в материале вихревыми токами. Возможно, однако, неподвижное крепление одной или нескольких катушек не прямо на постоянном магните, а на другом элементе датчика, предпочтительно жестко механически соединенном с постоянным магнитом.
[0032] Фиксация катушек на постоянном магните позволяет к тому же создать конструкцию особо малых размеров с компактными датчиками; такая конструкция требует соответственно малого рабочего пространства. Кроме того, такая конструкция дешева, поскольку, помимо постоянного магнита и катушек, никаких дополнительных электрически/магнитных элементов не требуется. Компактная конструкция делает такие датчики особенно удобными для использования в матрицах датчиков, то есть в системах датчиков с набором из нескольких датчиков, размещенных сравнительно тесно в одномерной или двумерной группировке, например, для того, чтобы можно было одновременного исследовать увеличенные зоны поверхности проверяемого материала. Во многих вариантах осуществления несколько дифференциальных датчиков сводят в одномерную или двумерную матрицу датчиков.
[0033] Если сравнивать дифференциальные датчики согласно настоящему изобретению с датчиками для вышеописанной индукционной дефектоскопии с использованием силы Лоренца, то следует заметить, что дифференциальные датчики согласно настоящему изобретению выявляют изменение магнитного потока, в то время как при индукционной дефектоскопии с использованием силы Лоренца регистрируют и оценивают с помощью соответствующих датчиков силы абсолютные значения силы, действующей на магнитную систему. Но если механические системы измерения сил, в силу условий измерения, обладают лишь сравнительно ограниченной динамикой, так как для измерения силы в системе должны быть произведены механические изменения, то при использовании индукционных датчиков согласно настоящему изобретению такого ограничения динамики измерений нет. Поэтому, в сравнении с индукционной дефектоскопией с использованием силы Лоренца, возможны измерения при более высокой скорости контроля.
[0034] Можно теоретически показать, что при индукционной дефектоскопии с использованием силы Лоренца регистрируемое изменение сил Лоренца прямо коррелирует с изменениями магнитного потока, так что результаты, полученные в связи с оценкой сигналов индукционной дефектоскопии с использованием силы Лоренца, при определенных условиях могут быть приложены и к контролю с дифференциальными датчиками согласно настоящему изобретению.
[0035] Во многих вариантах осуществления в дополнение к дифференциальному датчику предусматривают датчик силы, механически соединенный с дифференциальным датчиком таким образом, что действующие на дифференциальный датчик силы Лоренца с помощью датчика силы можно измерять по нескольким пространственным направлениям. Таким образом создают комбинированный датчик, или комбинацию датчиков. Такое соединение с датчиком силы позволяет одновременно проводить контроль двумя разными способами, при этом в одном способе контроля с помощью дифференциального датчика могут выявляться дефекты на основании зарегистрированного по нескольким пространственным направлениям изменения магнитного потока (dФ/dt) - и в то же время, в том же проверяемом объеме, на основе целесообразной корреляции компонентов силы Лоренца по нескольким пространственным направлениям может некоторым способом замеряться электропроводность.
[0036] Дифференциальный датчик раскрытого здесь типа может, например, применяться в способе и устройстве для определения электропроводности материала согласно вышеупомянутому документу DE 102011056650 А1, объем раскрытия которого включен в содержание настоящего описания посредством ссылки.
[0037] Настоящее изобретение относится также к системе контроля для выявления отклонений от нормы в электропроводных материалах, причем эта система контроля содержит, по меньшей мере, один дифференциальный датчик раскрытого выше типа. Этот датчик в процессе работы подключается к устройству оценки, выполненному для регистрации индуцированных в обмотках, по меньшей мере, двух катушек электрических напряжений или производных от них сигналов отдельно для каждой катушки и для установления корреляции этих сигналов посредством применения, по меньшей мере, одного способа оценки.
[0038] К примеру, устройство оценки может быть выполнено так, чтобы только тогда выдавать сигнал дефекта или основанное на нем предупреждение, указывающие на наличие дефекта, когда характерное для дефекта изменение напряжения индуцируется как в первой, так и во второй катушке. Таким образом можно снизить процент ошибочных сигналов обнаружения.
[0039] Если еще предусмотрен механически соединенный с дифференциальным датчиком многомерно действующий датчик силы вышеупомянутого типа, то следует предусмотреть устройство оценки сигналов датчика силы по нескольким пространственным направлениям.
[0040] Настоящее изобретение относится также к способу выявления отклонений от нормы в электропроводных материалах, в котором используется дифференциальный датчик или система контроля с таким датчиком. При этом (по меньшей мере) один дифференциальный датчик располагают вблизи поверхности испытуемого объекта из электропроводного материала таким образом, чтобы созданное постоянным магнитом магнитное поле могло проникнуть в испытуемый объект на некоторую глубину проникновения. Осуществляют относительное движение дифференциального датчика и исследуемого объекта параллельно некоторому направлению движения. Это может быть реализовано движением исследуемого объекта при неподвижном датчике, или движением датчика при неподвижном исследуемом объекте, или комбинацией движений исследуемого объекта и датчика. При этом расстояние между датчиком и поверхностью испытуемого образца должно оставаться, по возможности, постоянным. Благодаря такому относительному движению в зоне воздействия магнитного поля в материале создаются вихревые токи, вторичное магнитное поле которых воздействует на катушки дифференциального датчика. Индуцированные в обмотках катушек дифференциального датчика электрические напряжения или производные от них сигналы регистрируют отдельно для каждой катушки и оценивают с использованием, по меньшей мере, одного способа оценки, что позволяет выявлять отклонения от нормы в электропроводных материалах.
[0041] Эти и дальнейшие особенности вытекают не только из формулы изобретения, но также из настоящего описания и чертежей, причем отдельные особенности в различных вариантах осуществления настоящего изобретения могут быть реализованы по отдельности или совместно, в виде частичных сочетаний, также и в иных областях применения и могут давать обеспечивающие преимущества и независимо охраноспособные исполнения. Примеры осуществления настоящего изобретения представлены на чертежах и более подробно объясняются ниже.
Краткое описание графических материалов
На фиг. 1 показан в процессе контроля вариант осуществления системы контроля с дифференциальным датчиком согласно одному из вариантов осуществления настоящего изобретения;
на фиг. 2 схематически показан вариант осуществления дифференциального датчика трехмерного действия;
на фиг. 3 схематически показан вариант осуществления дифференциального датчика двухмерного действия;
на фиг. 4 схематически показан измерительный сигнал традиционной индукционной дефектоскопии с использованием силы Лоренца при отсутствии (-) и при наличии (---) дефекта, причем на фиг. 4А показан силовой сигнал в направлении движения материала, а на фиг. 4В - силовой сигнал в направлении высоты над поверхностью;
на фиг. 5 показан индуцированный сигнал напряжения дифференциального датчика согласно одному из вариантов осуществления настоящего изобретения, при этом на фиг. 5А показан сигнал катушки с осью в направлении оси x (направлении движения), а на фиг. 5В - сигнал катушки с осью в направлении оси z (направлении высоты над поверхностью);
на фиг. 6 схематически показана система контроля, выполненная для комбинированного контроля способом индукционной дефектоскопии с использованием силы Лоренца и способом дифференциальной индукционной дефектоскопии;
на фиг. 7 показана двумерная матрица датчиков с набором идентичных дифференциальных датчиков и
на фиг. 8 показана система контроля с системой датчиков, содержащей два дифференциальных датчика, расположенных на разных контрольных расстояниях от испытуемого объекта с целью компенсации зависимости от расстояния.
Подробное раскрытие предпочтительных вариантов осуществления изобретения
[0042] Схематическое изображение на фиг. 1 показывает вариант осуществления системы контроля с дифференциальным датчиком согласно одному из вариантов осуществления настоящего изобретения в процессе контроля, осуществляемого одним из способов выявления отклонений от нормы в испытуемом объекте OBJ, который, по меньшей мере, в зоне поверхности OB, а возможно и целиком, состоит из электропроводного материала.
[0043] В этой схеме контроля или измерения система контроля покоится относительно неподвижной декартовой системы координат KS, в то время как испытуемый объект движется относительно нее со скоростью v в направлении R движения, т.е. в направлении оси х. Испытуемый объект, например, пластина или полоса из стали, алюминия или иного ферромагнитного или неферромагнитного материала содержит, например, скрытый дефект D1, который не достигает поверхности OB испытуемого объекта и залегает на некоторой определенной глубине, а также поверхностный дефект D2 в виде раковины, которая достигает поверхности OB.
[0044] Система SYS контроля содержит дифференциальный датчик SENS1, подключенный к устройству А оценки. Датчик SENS1 содержит постоянный магнит PM, например, редкоземельный магнит в форме прямоугольного параллелепипеда. Для осуществления контроля постоянный магнит приближают к испытуемому объекту и ориентируют так, чтобы магнитная ось магнита, то есть магнитная силовая линия, соединяющая северный магнитный полюс N и южный магнитный полюс S, как можно меньше отклонялась от перпендикуляра к поверхности OB испытуемого объекта.
[0045] Датчик содержит первую катушку S1 с одной или более первыми обмотками, навитыми вокруг постоянного магнита и определяющими первую (ориентированную перпендикулярно обмоткам) ось катушек, идущую, например, параллельно магнитной оси постоянного магнита, или параллельно оси z. Далее, предусматривают вторую катушку S2 с одной или более вторыми обмотками, навитыми вокруг постоянного магнита и определяющими вторую ось катушек, которая идет перпендикулярно первой оси катушек, именно в направлении оси х, в процессе работы ориентированном, по возможности, параллельно направлению R движения. Дополнительно предусматривают третью катушку S3, также с одной или более обмотками, навитыми вокруг постоянного магнита и определяющими третью ось катушек, которая идет перпендикулярно первой и второй осям катушек, то есть параллельно направлению оси y.
[0046] Таким образом, эти три оси катушек - или перпендикулярные соответствующим осям катушек плоскости катушек - расположены взаимно перпендикулярно друг другу. Катушки навиты, например, изолированным проводом и электрически изолированы друг от друга. Катушки закреплены на постоянном магните, например, с помощью клея, так что их движение относительно магнита невозможно. Этот узел постоянного магнита и катушек может быть залит электрически не проводящей немагнитной полимерной массой, которая для простоты не показана. Каждая из катушек отдельно подключена к устройству А оценки, при этом для каждой катушки выделен свой входной канал.
[0047] Система контроля способна выявлять временные изменения магнитного потока Ф в промеренной катушками зоне, при этом индуцированные в обмотках отдельных катушек электрические напряжения регистрируются и оцениваются устройством оценки. Временные изменения магнитного потока могут регистрироваться раздельно по трем пространственным осям декартовой системы координат. Компоненты изменения магнитного потока в направлении оси z регистрируются первой катушкой S1 и индуцируют в ней соответствующее электрическое напряжение Uz. Компоненты изменения магнитного потока в направлении оси х, то есть более или менее параллельном направлению R движения испытуемого объекта, создают во второй катушке S2 соответствующее электрическое напряжение Ux. Компоненты, перпендикулярные названным компонентам, параллельны направлению оси y, то есть направлению поперек движения, создают в третьей катушке S3 соответствующее напряжение Uy. Отдельные напряжения раздельно регистрируются устройством оценки, и затем с помощью различных способов оценки могут быть установлены корреляции между этими напряжениями.
[0048] Поскольку датчик SENS1 способен регистрировать временные изменения магнитного потока, то есть дифференциальную величину dФ/dt, по многим пространственным направлениям раздельно, он называется также «дифференциальным многокомпонентным датчиком».
[0049] На фиг. 2 схематически показан возможный вариант осуществления датчика трехмерного действия SENS1, изображенного на фиг. 1. Обмотки первой катушки S1 и второй катушки S2 навиты во взаимно перпендикулярных направлениях, каждая - непосредственно на внешнюю периферию постоянного магнита, тогда как обмотка третьей катушки S3 навита перпендикулярно обмоткам обеих, первой и второй, катушек, вокруг них. Возможно также расположить катушки наоборот.
[0050] На фиг. 3 показан упрощенный вариант датчика SENS2, содержащий только первую катушку S1 и вторую катушку S2, так что могут регистрироваться лишь две компоненты изменения магнитного потока по двум взаимно перпендикулярных пространственным направлениям. Для многих задач измерения и контроля этого может быть достаточно.
[0051] Принцип действия этого датчика или этой системы контроля может быть описан следующим образом. Вследствие относительного движения обмотанного катушками постоянного магнита РМ и испытуемого объекта, выполненного из электропроводного материала, магнитное поле постоянного магнита индуцирует в испытуемом объекте вихревые токи. Последние, в свою очередь, создают вторичное магнитное поле, которое взаимодействует с первичным магнитным полем постоянного магнита и накладывается на это поле. При этом катушки «видят» образованное суперпозицией (первичного и вторичного полей) полное поле, но в катушках регистрируются в виде индуцированных напряжений только изменения вторичного поля. Аномалии в испытуемом объекте вызывают изменения магнитного потока в зоне катушек и поэтому могут быть зарегистрированы дифференциальным датчиком.
[0052] Предлагаемые способ контроля, система контроля и датчик обеспечивают ряд преимуществ перед традиционной индукционной дефектоскопией (возбуждением первичного поля с помощью токопроводящих катушек возбуждения); эти преимущества, в частности увеличенная глубина проникновения, могут быть получены и в описанной выше индукционной дефектоскопии с использованием силы Лоренца. Однако в сравнении с индукционной дефектоскопией с использованием силы Лоренца предлагаемое изобретение обеспечивает дальнейшие преимущества, и прежде всего, в плане возможности более динамичного контроля (увеличения скоростей контроля) и исключения ошибок обнаружения. Для лучшего понимания изобретения ниже будут объяснены некоторые общие черты и существенные различия обоих способов и соответственных систем датчиков.
[0053] Как уже было отмечено, при индукционной дефектоскопии с использованием силы Лоренца вихревые токи в проверяемом материале создаются постоянным магнитным полем, например, постоянного магнита или катушки, запитываемой постоянным током. Временное изменение магнитного поля при взаимодействии с материалом создается относительным движением испытуемого объекта и источника постоянного поля.
[0054] По закону Ома для подвижного носителя заряда, при магнитной индукции В и скорости v относительного движения, в испытуемом объекте индуцируются вихревые токи с плотностью j:
[0055] Вихревые токи, в свою очередь, взаимодействуют с первичным постоянным полем. Это взаимодействие в некотором объеме V материала приводит к силовому воздействию на проверяемый материал, обозначаемому как сила Лоренца FLF:

[0056] Согласно третьему закону Ньютона «действие = противодействию» должна существовать вторая сила, реактивно воздействующая на источник силы Лоренца, то есть на источник первичного магнитного поля, а именно на постоянный магнит PM. Эта сила является векторной величиной и имеет составляющие по трем пространственным направлениям. На фиг. 1 показаны соответствующие силовые составляющие Fx, Fy и Fz по направлениям осей х y и z. Если в проверяемом материале нет дефектов, то на путях вихревых токов нет помех и сила Лоренца постоянна. Если же есть дефект, создающий помеху на путях вихревых токов, то возникают изменения этой силы, которые могут быть измерены.
[0057] На фиг. 4 показан для наглядности типовой измерительный сигнал индукционной дефектоскопии с использованием силы Лоренца при отсутствии (сплошная линия) и при наличии (пунктир) дефекта, причем на фиг. 4А показан силовой сигнал в направлении движения материала (по оси х), а на фиг. 4В - силовой сигнал в направлении высоты над поверхностью (по оси z).
[0058] Первичное магнитное поле является постоянным полем, поэтому глубина проникновения вихревых токов в материал определяется относительной скоростью, а не, преимущественно, частотой возбуждения, как в классической индукционной дефектоскопии. Благодаря этому при тех же условиях измерений потенциально можно проводить более глубокую дефектоскопию.
[0059] Силы могут быть измерены только по их действию. Обычно при этом используют механически деформируемые тела, по растяжению и сжатию которых могут быть рассчитаны действующие силы. Эти деформируемые тела с точки зрения структурной механики - скорее, тела малой жесткости. По этой причине их собственные частоты нередко лежат в нижнем герцовом диапазоне. Но высокие скорости измерений требуют измерительных систем с высокими динамическими свойствами, поэтому системы с низкими собственными частотами не подходят. Такая система просто не заметит возмущения, если его временная протяженность будет слишком короткой (виброизоляция).
[0060] Также нежелательно может воздействовать на систему контроля длительно действующая сила Лоренца. Соответственно, система датчиков должна покрывать широкий диапазон измерений. Возмущение, указывающее на наличие дефекта, мало по сравнению с действующей силой Лоренца. Поэтому должно быть обеспечено соответственно высокое разрешение. Два эти требования (диапазон измерений и разрешение) противоречивы и создают конфликт целей, который обычно преодолевается только компромиссным техническим решением.
[0061] В отличие от классической индукционной дефектоскопии, индукционная дефектоскопия с использованием силы Лоренца лишь ограниченно применима для контроля ферромагнитных материалов. Здесь приходится уравновешивать большие силы притяжения между магнитом и проверяемым материалом. В противном случае сила Лоренца и, в частности, помехи от сил притяжения наложатся и не позволят удовлетворительным образом провести дефектоскопию.
[0062] Индукционная дефектоскопия с использованием силы Лоренца ограничена в применении не частотно-зависимой, а зависящей от скорости глубиной проникновения. Эта зависимость от скорости проявляется, начиная с 1 м/с, в нелинейности графика силового воздействия. Способ потенциально подходит для выявления выходящих на поверхность или приповерхностных дефектов в неферромагнитных материалах. Удельная электропроводность проверяемого материала может быть определена по двум замеренным силовым компонентам (ср. документ DE 102011056650 А1).
[0063] Для преодоления описанного конфликта целей в индукционной дефектоскопии с использованием силы Лоренца можно было бы регистрировать только временное изменение силового сигнала. С одной стороны, изменение сигнала можно определять с помощью дифференциальной схемы, требующей двух однотипных измерительных систем, из которых одна исследует дефектную часть проверяемого материала, в то время как другая проходит мимо дефекта; с другой стороны, изменение можно определять по временной производной сигнала (дифференцированием по времени).
[0064] Как оказалось, определять временную производную силового сигнала затруднительно, так как при этом усиливается шум. Лучше замерять физическую величину, связанную с силой Лоренца через временное изменение.
[0065] Силовой сигнал создается полным магнитным полем, возникающим в результате взаимодействия первичного и вторичного магнитных полей. Временное изменение вторичного магнитного поля влечет за собой и временное изменение полного магнитного поля. Постоянная первичная составляющая не влияет на временную производную. Вторичное магнитное поле изменяется, реагируя на помеху на путях вихревых токов. Это временное изменение магнитного поля может быть замерено различными датчиками, например, катушками индуктивности. В катушке с числом витков N и осью катушки А временное изменение магнитного потока индуцирует электрическое напряжение U:

[0066] Можно показать, что это напряжение пропорционально соответствующей компоненте силы Лоренца.
[0067] Полученное таким образом выражение для напряжения содержит изменения магнитного потока, вызываемые кромками тела или аномалиями свойств материала. Аномалии свойств материала могут, помимо прочего, представлять собой отклонения электропроводности и магнитной проницаемости, воздушные включения и трещины. Поскольку способ использует временную производную, он называется «дифференциальным» способом. В частности, он может называться так: «Индукционная дефектоскопия с использованием индуцированного движением вторичного поля» (Motion Induced Secondary Field Eddy Current Testing, MISFECT).
[0068] При неизменном по времени сигнале (нет материала в зоне контроля; материал в зоне контроля есть, но дефектов нет) напряжение равно нулю, и только при изменениях замеряется какое-то напряжение, поэтому для выявления дефектов достаточно перекрытия небольшой зоны измерения. Возможное при этом высокое разрешение измерительной системы обеспечивает повышение вероятности выявления дефектов. Такой датчик пассивен, так как не требует подвода энергии, и устойчив к перегрузкам, так как индуцируются лишь небольшие электрические напряжения, неспособные разрушить датчик.
[0069] Для наглядности на фиг. 5 показан индуцированный сигнал напряжения в различно ориентированных катушках, причем на фиг. 5А показан сигнал второй катушки с осью в направлении оси х (направлении движения), а на фиг. 5В - сигнал первой катушки с осью в направлении оси z (направлении высоты над поверхностью).
[0070] Временная корреляция двух или нескольких сигналов напряжения может быть использована для снижения количества кажущегося брака (плохо проверенных хороших деталей). Так как изменение магнитного поля должно одновременно происходить в нескольких катушках, можно игнорировать сигналы ошибок, возникшие только в одном компоненте датчика.
[0071] В отличие от индукционной дефектоскопии с использованием силы Лоренца, силы магнитного притяжения измерительной системы уже не мешают. Соответственно, в представленной здесь индукционной дефектоскопии с использованием индуцированного движением вторичного поля можно на высокой скорости контроля с высокой чувствительностью исследовать также и ферромагнитные материалы.
[0072] Дифференциальные индукционные датчики раскрытого выше типа могут обеспечить преимущество при использовании в сочетании с многокомпонентным индукционным датчиком силы Лоренца, выполненным для регистрации компонент абсолютной величины индуцированной силы Лоренца в соответствующих пространственных направлениях. В силу родственности двух этих способов можно, помимо прочего, одновременно с неразрушающей дефектоскопией проводить, например, измерение удельной электропроводности проверяемого материала.
[0073] Для наглядности на фиг. 6 схематически показаны существенные компоненты системы SYS1 контроля, выполненной для таких комбинированных испытаний. Комбинированный датчик SS или комбинация SS датчиков этой системы контроля содержит один дифференциальный датчик SENS3 для регистрации изменения магнитного потока в трех измерениях; конструкция и работа этого датчика могут быть такими же, как у датчика SENS1 с фиг. 1 или 2. Соответствующие компоненты обозначены так же, как на фиг. 1 и 2 (см. относящиеся к ним описания). Три ортогональные друг другу катушки, навитые на постоянный магнит PM, отдельно друг от друга подключены к первому устройству А1 оценки.
[0074] Датчик SENS3 с помощью держателя Н из электрически непроводящего немагнитного материала закреплен на нижней стороне датчика силы F-SENS и таким образом механически неподвижно с ним связан. Этот держатель может быть образован, например, полимерной оболочкой датчика SENS3, приклеенной или привинченной к подходящей для соединения плоскости датчика силы. Датчик F-SENS силы механически жестко соединен с пространственно неподвижно установленным элементом К системы SYS1 контроля, позиции и пространственную ориентацию которого можно описать в пространственно неподвижной системе координат KS.
[0075] Датчик силы схематически представлен деформируемым телом малой механической жесткости, растяжение - или сжатие, или перекос - которого под действием внешних сил может быть зарегистрировано тензометром или другим электромеханическим преобразователем, и по электрическому сигналу преобразователя можно вычислить силы, вызвавшие эту деформацию. Датчик силы подключен ко второму устройству А2 оценки достаточной мощности, для того чтобы можно было рассчитать силовое воздействие по трем пространственным направлениям.
[0076] Комбинированный датчик SS в данном примере расположен на малом контрольном расстоянии PA над поверхностью OB металлического электропроводящего испытуемого объекта OBJ, движущегося со скоростью v параллельно оси х относительно неподвижного комбинированного датчика SS.
[0077] Испытуемый объект может, например, представлять собой металлическую пластину с передней и задней (если смотреть по направлению движения) кромками и поверхностным дефектом D3. На фиг. 4 и 5 схематически показаны возможные сигналы датчиков при отсутствии (сплошная линия) и при наличии (пунктир) дефекта, причем в двух измерениях, а именно: одно, на фиг. 4А и 5А, - параллельно направлению прохода материала (по оси х), другое, на фиг. 4В и 5В, - в направлении оси z, то есть в направлении подъема перпендикулярно поверхности испытуемого образца.
[0078] Силовой сигнал Fx (в направлении движения) при входе передней кромки вырастает на некоторую конечную величину и затем остается на постоянном, по существу, уровне, пока задняя кромка не пройдет датчик, после чего сигнал падает вновь до нуля. Этот соответствующий силе торможения сигнал при наличии дефекта незначительно снижается в зоне плато, так как дефект мешает распространению вихревых токов в материале и, таким образом, возмущает вторичное поле. Кромки видны на графике силы подъема (фиг. 4В) по большим противонаправленным пикам, тогда как оказавшийся между ними дефект дает, в сравнении с ними, маленькое, приблизительно синусоидальное возмущение сигнала.
[0079] Возникающие в дифференциальном датчике SENS3 сигналы напряжения имеют иной вид. Согласно фиг. 5А, кромки объекта на сигнале напряжения второй катушки S2 с осью в направлении оси х видны по большим противонаправленным пикам, при этом между ними, в случае прохода неповрежденного материала, сигнал напряжения пропадает. Если же в зоне датчика проходит дефект, то возникает приблизительно синусоидальный сигнал дефекта. Первая катушка S1, плоскость которой параллельна поверхности испытуемого образца, регистрирует компоненту изменений магнитного потока, действующую перпендикулярную поверхности испытуемого образца, то есть в направлении высоты над поверхностью. При этом передняя и задняя кромки дают большие противонаправленные искаженно-синусоидальные пики. В бездефектной промежуточной области напряжение падает до нуля. Появившийся дефект дает о себе знать искаженно-синусоидальным пиком сигнала напряжения.
[0080] Сигналы обоих типов, а именно вызванный силовыми воздействиями сигнал датчика F-SENS силы и индуцированные электрические напряжения дифференциального датчика SENS3, оцениваются системой SYS1 контроля для вывода заключения о проверенном материале. Наличие или отсутствие дефектов с высокой чувствительностью и высокодинамично определяется первым устройством А1 оценки по сигналам дифференциального датчика SENS3. В то же время и для того же проверяемого объема по сигналам датчика силы определяется удельная электропроводность материала испытуемого образца. При этом формируют соотношение Fz/Fx, делимое которого включает меру силового воздействия (Fz) в направлении высоты над поверхностью, а делитель - меру силового воздействия, параллельного направлению движения, то есть меру силы торможения (Fx). На основе этих результатов измерений можно способом, раскрытым в документе DE 102011056650 А1, определить электропроводность материала испытуемого образца. При этом образованием упомянутого отношения можно минимизировать влияния магнитной индукции магнита и расстояния от постоянного магнита до материала на результаты измерений, так что возможно бесконтактное определение электропроводности с высокой точностью. Соответствующий объем раскрытия документа DE 102011056650 А1 включен, таким образом, в настоящее описание посредством ссылки.
[0081] Система SYS1 комбинированного контроля или комбинированный датчик SS имеют механически и электрически сравнительно простую и прочную конструкцию и могут применяться, например, в сертификации электропроводных материалов непосредственно при их производстве, чтобы, наряду с проведением высокодинамичной и чувствительной дефектоскопии, еще и получать точные количественные данные по электропроводности. Такие комбинированные датчики могут с большой выгодой применяться, например, в производстве алюминия, заменив применяющиеся до настоящего времени раздельные способы контроля.
[0081] Во многих вариантах осуществления система контроля содержит систему датчиков с двумя или более дифференциальными датчиками, конструкции которых могут быть сходны или идентичны.
[0083] На фиг. 7 показана система датчиков в виде матрицы AR датчиков с набором из нескольких, например из девяти, идентичных дифференциальных датчиков, сравнительно тесно размещенных рядом друг с другом в двухмерной плоской группировке прямоугольной матрицы; система предназначена, например, для того, чтобы можно было одновременно промерять увеличенные области поверхности исследуемого материала. В матрице датчиков может быть и меньше, и больше датчиков, например, от 4 до 20 датчиков и более.
[0084] У отдельного дифференциального датчика имеется по каждой компоненте (изменения магнитного потока) характеристическая функция отображения (функция точечной развертки). Так что если в матрице датчиков работает несколько датчиков и корреляция сигналов отдельных датчиков с позициями этих датчиков устанавливается с использованием, по меньшей мере, одного алгоритма оценки, то в результате испытания можно получить, по меньшей мере, двумерное (2D), а предпочтительно - трехмерное (3D) изображение проверяемого материала. Использование дальнейших алгоритмов оценки может позволить выполнить 3D-реконструкцию дефектов. Благодаря своей компактной конструкции дифференциальные датчики хорошо подходят и для применения в визуализирующих способах контроля или измерения.
[0085] По меньшей мере, два отдельных дифференциальных датчика могут использоваться для компенсации влияния помех, например, для компенсации изменений контрольного расстояния. Для этого должна быть, по возможности, хорошо известна дистанционная характеристика (зависимость амплитуды сигнала от контрольного расстояния) отдельного датчика. Если же работают два отдельных датчика на двух разных контрольных расстояниях, то можно определить, на какую величину меняется контрольное расстояние, и внести соответственную поправку в измерительный сигнал (компенсация влияния расстояния).
[0086] Раскрытая возможность использования нескольких дифференциальных датчиков в системе SYS3 контроля объясняется со ссылкой на фиг. 8. Система SABS датчиков содержит два датчика идентичной конструкции: первый дифференциальный датчик SENS4-1 и второй дифференциальный датчик SENS4-2. Кроме того, могут быть предусмотрены дополнительные дифференциальные датчики, которые не показаны. Оба указанных датчика могут быть, например, интегрированы в матрицу датчиков. Сигналы каждой из трех катушек каждого из датчиков по отдельности регистрируют в соответственных устройствах Aij оценки, где i=1, 2, 3 и j=1, 2, 3, и затем устанавливают корреляцию между сигналами. Два указанных датчика смещены один относительно другого в направлении оси z, так что, когда система датчиков располагается вблизи от поверхности OB испытуемого образца, датчики находятся на разных высотах над исследуемым объектом OBJ. Первое контрольное расстояние PA1 больше второго контрольного расстояния PA2. Совместная оценка сигналов датчиков позволяет создать систему контроля с компенсацией влияния расстояния.
[0087] В показанных вариантах осуществления постоянный магнит представляет собой магнит, состоящий, по меньшей мере, из одного куска магнитного материала, который имеет свое статическое магнитное поле и не требует, как в случае электромагнитов, электропитания для создания магнитного поля. Постоянный магнит - это работающий без тока источник постоянного магнитного поля. При определенных условиях многие преимущества предлагаемого изобретения могут быть достигнуты и применением источника постоянного магнитного поля, который содержит, по меньшей мере, одну катушку, запитываемую постоянным током, при этом последняя для создания постоянного магнитного поля должна подключаться к источнику тока, по возможности, неизменной силы. Поскольку при этом описанные в настоящем документе преимущества, по существу, сохраняются, понятие «постоянный магнит» обозначает в широком смысле источник постоянного магнитного поля.
[0088] Вообще говоря, не обязательно, чтобы магнитная ось постоянного магнита или источника постоянного магнитного поля была как можно ближе к перпендикуляру к поверхности испытуемого объекта. Возможна и наклонная ориентация или ориентация параллельно поверхности испытуемого образца. Однако из всех ориентаций ортогональная особенно благоприятна в силу возможности достижения более высоких напряженностей поля.
[0089] В показанных вариантах осуществления катушки различных ориентаций работают как датчики магнитного поля, выдающие при изменении действующего на эти катушки магнитного поля сигнал датчика в виде индуцированного напряжения. Таким образом, в широком смысле понятие «катушка» распространяется на чувствительный к изменениям магнитного поля датчик, то есть на датчик, вырабатывающий при изменении действующего на него магнитного поля пропорциональный этому изменению сигнал датчика, например, в виде сигнала электрического напряжения. Одна, несколько или все катушки могут быть при необходимости заменены другими чувствительными к изменениям магнитного поля датчиками, например, датчиками Холла или сквидами (SQUID) - сверхпроводящими квантовыми интерференционными датчиками.
[0090] Согласно другой формулировке, настоящим предлагается дифференциальный датчик для выявления отклонений от нормы в электропроводных материалах, содержащий:
источник постоянного магнитного поля;
первый чувствительный к изменениям магнитного поля датчик, определяющий первую ось датчика, и,
по меньшей мере один второй чувствительный к изменениям магнитного поля датчик, определяющий вторую ось датчика, идущую поперек, в частности перпендикулярно, первой оси датчика,
причем каждая из осей датчика сориентирована в направлении максимальной чувствительности датчика к изменениям магнитного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ПРОТЯЖЁННЫХ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2651618C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2610931C1 |
| УСТРОЙСТВО И СПОСОБ ЭЛЕКТРОМАГНИТНОГО АКУСТИЧЕСКОГО КОНТРОЛЯ МАТЕРИАЛА И/ИЛИ ИЗМЕРЕНИЯ ТОЛЩИНЫ ИСПЫТУЕМОГО ОБЪЕКТА, СОДЕРЖАЩЕГО ПО МЕНЬШЕЙ МЕРЕ ЭЛЕКТРОПРОВОДЯЩИЕ И ФЕРРОМАГНИТНЫЕ КОМПОНЕНТЫ | 2005 |
|
RU2393468C2 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИИ ДЕФЕКТА | 2014 |
|
RU2598777C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ | 2014 |
|
RU2566418C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В СВАРНЫХ ШВАХ | 2015 |
|
RU2587695C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| ИНДУКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2600517C2 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |




Изобретение относится к неразрушающему выявлению отклонений от нормы в электропроводных материалах. Сущность изобретения заключается в том, что дифференциальный датчик для выявления отклонений от нормы в электропроводных материалах содержит постоянный магнит; первую катушку с одной или более первыми обмотками, навитыми вокруг постоянного магнита и определяющими первую ось катушек, и вторую катушку с одной или более вторыми обмотками, навитыми вокруг постоянного магнита и определяющими вторую ось катушек, идущей поперечно первой оси катушек. Технический результат – повышение точности выявления отклонений от нормы в электропроводных материалах. 3 н. и 10 з.п. ф-лы, 8 ил.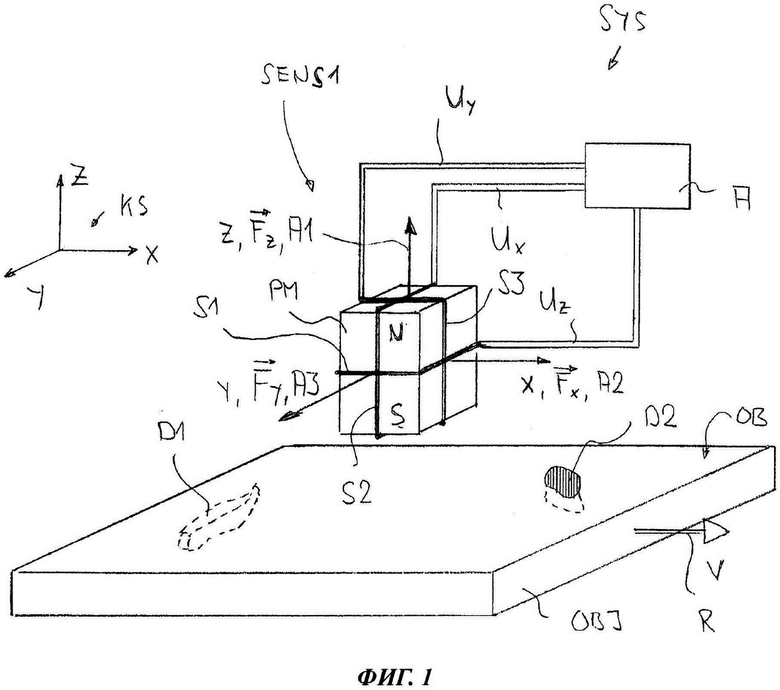
1. Дифференциальный датчик для выявления отклонений от нормы в электропроводных материалах, содержащий:
постоянный магнит (РМ);
первую катушку (S1) с одной или более первыми обмотками, навитыми вокруг постоянного магнита и определяющими первую ось (А1) катушек, и
вторую катушку (S2) с одной или более вторыми обмотками, навитыми вокруг постоянного магнита и определяющими вторую ось (А2) катушек, идущую поперечно первой оси катушек.
2. Дифференциальный датчик по п. 1, отличающийся тем, что содержит третью катушку (S3) с одной или более третьими обмотками, навитыми вокруг постоянного магнита и определяющими третью ось (A3) катушек, идущую поперечно первой оси (А1) и второй оси (А2) катушек.
3. Дифференциальный датчик по п. 1 или 2, отличающийся тем, что оси (А1, А2, A3) катушек ориентированы взаимно перпендикулярно друг другу.
4. Дифференциальный датчик по п. 1 или 2, отличающийся тем, что первая катушка (S1), вторая катушка (S2) и третья катушка (S3) закреплены на постоянном магните.
5. Дифференциальный датчик по п. 1 или 2, отличающийся тем, что дифференциальный датчик (SENS3) механически связан с датчиком (F-SENS) силы таким образом, чтобы силы Лоренца, действующие на дифференциальный датчик, могли быть зарегистрированы датчиком силы по нескольким пространственным направлениям.
6. Система контроля для выявления отклонений от нормы в электропроводных материалах, содержащая:
по меньшей мере, один дифференциальный датчик (SENS1, SENS2, SENS3) по любому из пп. 1-5; и
устройство (А, А1) оценки, выполненное с возможностью регистрации индуцированных в обмотках катушек (S1, S2, S3) дифференциального датчика электрических напряжений или производных от них сигналов отдельно для каждой катушки и установления корреляции этих напряжений или сигналов посредством использования по меньшей мере одного способа оценки.
7. Система контроля по п. 6, отличающаяся тем, что устройство (А, А1) оценки выполнено с возможностью выдавать сигнал дефекта, указывающий на наличие дефекта, только тогда, когда характерное для дефекта изменение индуцированного напряжения происходит в первой катушке и во второй катушке.
8. Система контроля по п. 6 или 7, отличающаяся тем, что содержит датчик (F-SENS) силы, механически связанный с дифференциальным датчиком (SENS3) таким образом, чтобы силы Лоренца, действующие на дифференциальный датчик, могли быть зарегистрированы датчиком силы по нескольким пространственным направлениям, и
устройство оценки (А2) для оценки сигналов датчика силы для нескольких пространственных направлений.
9. Система контроля по п. 6 или 7, отличающаяся тем, что для оценки сигналов датчика силы применено соотношение, делимое которого представляет собой меру силового воздействия, перпендикулярного поверхности испытуемого образца, а делитель - меру силового воздействия, параллельного направлению движения.
10. Система контроля по п. 6 или 7, отличающаяся тем, что система (SYS3) контроля содержит систему (SABS) датчиков, включающую в себя по меньшей мере два дифференциальных датчика (SENS4-1, SENS4-2), расположенных со смещением один относительно другого так, что они находятся на разных контрольных расстояниях (РА1, РА2) над исследуемым объектом, когда система датчиков расположена вблизи от поверхности (ОВ) исследуемого объекта.
11. Система контроля по п. 6 или 7, отличающаяся тем, что устройство оценки выполнено с возможностью компенсации влияния расстояния.
12. Система контроля по п. 6 или 7, отличающаяся тем, что множество дифференциальных датчиков образуют одномерную или двумерную матрицу датчиков.
13. Способ выявления отклонений от нормы в электропроводных материалах с использованием дифференциального датчика по любому из пп. 1-5 и/или с использованием системы контроля по любому из пп. 6-12, содержащий следующие шаги:
размещают дифференциальный датчик вблизи поверхности испытуемого объекта из электропроводного материала таким образом, чтобы создаваемое постоянным магнитом магнитное поле могло проникнуть в испытуемый объект на глубину проникновения;
создают относительное перемещение между дифференциальным датчиком и испытуемым объектом из электропроводного материала параллельно направлению движения;
регистрируют отдельно для каждой катушки индуцированные в обмотках катушек (S1, S2, S3) дифференциального датчика электрические напряжения или производные от них сигналы; и
оценивают индуцированные в катушках электрические напряжения или производные от них сигналы, используя по меньшей мере один способ оценки.
| US 3697867 A, 10.10.1972 | |||
| US 5847563 A1, 08.12.1998 | |||
| UHLIG ROBERT P ET AL: "Lorentz force sigmometry: A contactless method for electrical conductivity measurements", JOURNAL OF APPLIED PHYSICS 111, AMERICAN INSTITUTE OF PHYSICS | |||
| NEW YORK, US, no | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ПОВРЕЖДЕНИЯ НА ТРАССЕ СИЛОВОЙ КАБЕЛЬНОЙ ЛИНИИ | 2001 |
|
RU2188435C1 |
| US 2003132748 A1, 17.07.2003 | |||
| Многошпиндельный двусторонний автомат для нарезания резьбы метчиками | 1985 |
|
SU1315178A1 |

