1
Изобретение относится к сейсмически врспедованиям, в частности к сейсмопр емникам.
Известно устройство, позвсиклошее регулировать жесткость упругой подвески инерционной массы сейсмоприемника, которое, кроме основного упругого элемента подвески, имеет допопнитепьный упругий элемент, выполненный в виде нескольких пар стержней, шарнирно связанных с инерцио ной массой и поджатых пружинами. Иэменяя предварительный натяг пружин (изменяя таким образом отрицательную жесткость),можно регулировать суммарную жесткость упругой подвески инёрц онной массы.
Недостатками данного устройства являются сложность конструкщга н начапьноА настройки системы, обусловленные . большим количеством упругих связей, наложенных на инерционную массу, ограниченные пределы измерения отрицатетьвой жесткости; сложность обеспечения иа евтичностн жесткостных характеристик пружвв
поджатия и упругихшарнцровсочленения стержней и трудность обеспечения стрсго симметричного нагружения пружин по жатия. Кроме того, дополнительный упругий элемент способствует увеличению паразитных крутильных колебаний инерционной массы вокруг оси X.
Наиболее близким по технической сущности к предлагаемому является ч:ейсмоприемник, содержащий устрсЛство для регулирования жесткости упругой подвески инерционней массы сейсмоприемника, состоящее из трех узлов, одним из которь1х является магнитный узел регулировки. Данный узел выполнен в виде двух постоянных магнитов, один из которых закреплен на корпусе с возможностью регулирований, а другсА - на индукционной катушке преобразователя. Регулиро вaниe fрасстояния между ними изменяется жесткость упруг(Л подвескиГ23.
Недостаток известного устройства рложиость регулировки, обусловленная наличием трех регулировочных узлов
(регулировка магнитов, регулирсвка рабочей дпвны цилиндрической пружины, регулировка натяжения последней), причем все три регулировки взаимно зависимы, т.е. регулирование одного узла нарушает регулирсаку двух других и нао-, барот, необходимости взаимной увязки суммаркой характеристики ирисовых и цилиндрической пружин с характеристикой взаимодействия магните с целыо подбора участков с кривизной близкой и обратной по знаку , ограниченные возможное ти регулирования жесткости, т.е. регулирование производится узком диапазоне с целью устранения погрешностей от изменения температуры, наклона оси прибора, усталостных деформаций в пружинах,
11ель изобретения - упрощение конст .рукцик и повышение точности.
Указанная цель достигается тем, что в устройстве для регулирования жесткости упругой подвески инерционной массы сейсмоприемника, содержащ упругую подвеску инерционной массы, состоящей вз постоянногомагнитаиполюсныхнакон&г чниксв, и дополнительный создающий отрицательную жесткость, дополнительный элемент выполнен в виде замкнутого магнитопровода, которого установлены с равными рабочими зазоратии относительно ториов инерционной массы с возможностью регулирования.
На фиг. 1 показана схема устройства, на фиг. 2 - график, поясняющий получ&кие суммарной характеристики упругой подвески инерционной массы в результате сложения собственной характеристики упругого элемента с характеристик магнитной системы,создающей отри
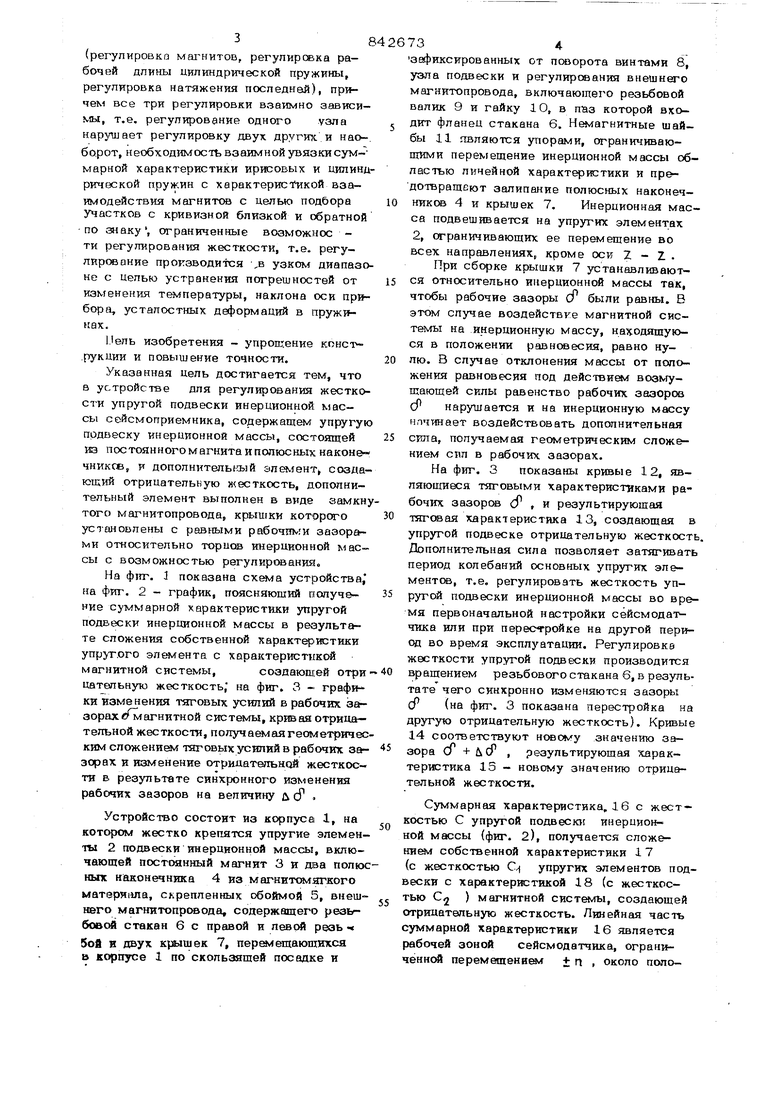
дательную жесткость, на фиг. 3 - графики изменения тягоеых усилий в рабочих зазорах «Магнитной С1ют и1ы крпваяотрвцательной жесткости, получаемая геометрическим сложении тягсеых усилий в рабочих зазорах и изменение отрииательной жесткости в результате синхронного изменения рабочих зазоров на величину tj ,
Устройство состоит из корпуса 1, на котором жестко крепятся упругие элементы 2 подвески инерционной массы, включающей постсанный магннт 3 и два полюсных наконечника 4 из магнятсж(ягкого материала, скрепленных обоймой 5, внешнего магнитопровода, содержащего (леаьбовой стакан 6 с правой и левЫ1 резь« Soft в двух крышек 7, пepav«eщaюпIИxcя ь корпусе 1 по скользящей посадке и
зафиксированных от поворота винтами 8, узла подвески и регулирования внешнего магнитопровода, включающего резьбовой валик 9 и гайку 10, в паз которой входит фланец стакана 6. Немагнитные шайбы 11 являются упорами, ограничивающими перемещение инерционной массы облш:тью линейной характеристики и пр&дотвращеют залипание полюсных наконечников 4 и крышек 7. Инерционная масса подвешивается на упругих элемент;ах 2, ограничивающих ее перемещение во всех направлениях, кроме оси Z - Z. /
При сборке крышки 7 устанавливаются относительно инерционней массы так, чтобы рабочие зазоры сГ были равны. В этсм случае воздействке магнитной системы на .инерционную массу, находящуюся в положении равновесия, равно нулю. В случае отклонения массы от положения равнсжесия под действием возмущающей силы равенство рабочих зазоров сР нарушается и на инерционную массу нпчинает воздействовать дополнительная сила, получаемая геометрическим сложением сил в рабочих зазорах.
На фиг. 3 показаны кривые 12, являющиеся тяговыми характеристиками рабочих зазоров Я , и результирующая тяговая характеристика 13, создающая в упругой по;шеске отрицательную жесткост Дополнительная сила позволяет затягивать период колебаний основных упругих элементов, т.е. регулировать жесткость упругсй подвески инерционной массы во время первоначальной настройки сёйсмодатчика или при п еетройке на другой период во время эксплуатации. Регулировка жесткости упругой подвески производится вращением резьбового стакана 6, в результате чего синхронно изменяются зазоры (Я (на фиг. 3 показана перестройка на другую отрицательную жесткость). Кривые 14 соответствуют новому .значению зазора СГ + Ь сЯ , результирующая характеристика 15 - новому значению отрицательной жесткости.
Суммарная характеристика, 16 с жесткостью С упругой подвески инерционной массы (фиг. 2), получается сложе«ием собственной характар{ютики 17 (с жесткостью С упругт эпементок подвески с характеристикой 18 (с жесткостью С2 ) магнитной системы, создающей отрицательную жесткость. Линейная часть суммарной характеристики 16 является рабочей зоной сейсмодатчшса, ограниченной перемещением + п . около положения равновесия системы, В конструк- щги сейсмоприемника ограничителями, не позволяющими системе перейти в попож&ние неустойчивого равновесия, являются немагнитные шайбы 11, с помощью которых можно устанавливать ход инернционной массы + п
В процессе эксплуатации сейсмоприемиика может произойти изменение жест кости yпfyгoй подвески по различным npfr чинам (старение материала упругих элементов, изменение TeMnepaTyfbi эксплуатации и др). В этом случае положение равновесия может сместиться к краю рабочего диапазона.Для восстановления нарушенной симметрии служит регулировочный узел, содержащий резьбовой вапик 9 и гайку 10.
Регулирование жесткости упругой подвески инерционной массы сейсмоприемн ка с помощью магнитных сил позволяет исключить контакт каких бы то ни было элементов или звеньев с инерционной массой, что упрощает конструкцию, настройку и регулировку системы, а применение замкнутой магнитной системы дает возможность симметричного воздействия на колебания инерционной массы, т.е. не нарушает гармоничность колебаний, позволяет просто соэмешать положвние нулевого воздействия магнитных
сил с положением равновесия инерционной массы и с минимальными потерями использовать энергию магнитного поля постоянного магнита.
Формула язобретеввя
Устройство для регулирования жесткости упругой подвески внершгонной массы сейсмоприемника, содержащее упругую подвеску инерционной массы, состоящЫ из постоянного магнита и по люсных наконечников, и дополнительный , создающий отрицательную жесткость, отличающееся тем, что, с целью упрощения конструкшш и повышения точности регулировки, дополнителный элемент выполнен в виде замкнутого магнитопрсвода, которого уста с равными рабочими зазорами относительно ториов инерционней массы с возможностью регулирования; Источники инфо ташп1,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 286258, кл.й01У 1/16, 1966,.
2.Авторское свидетельство СССР
№ 575592, кл. G01V 1/16, 1974 (прототип).
flo/tOiKCHue / 1)аВно6&сия
.l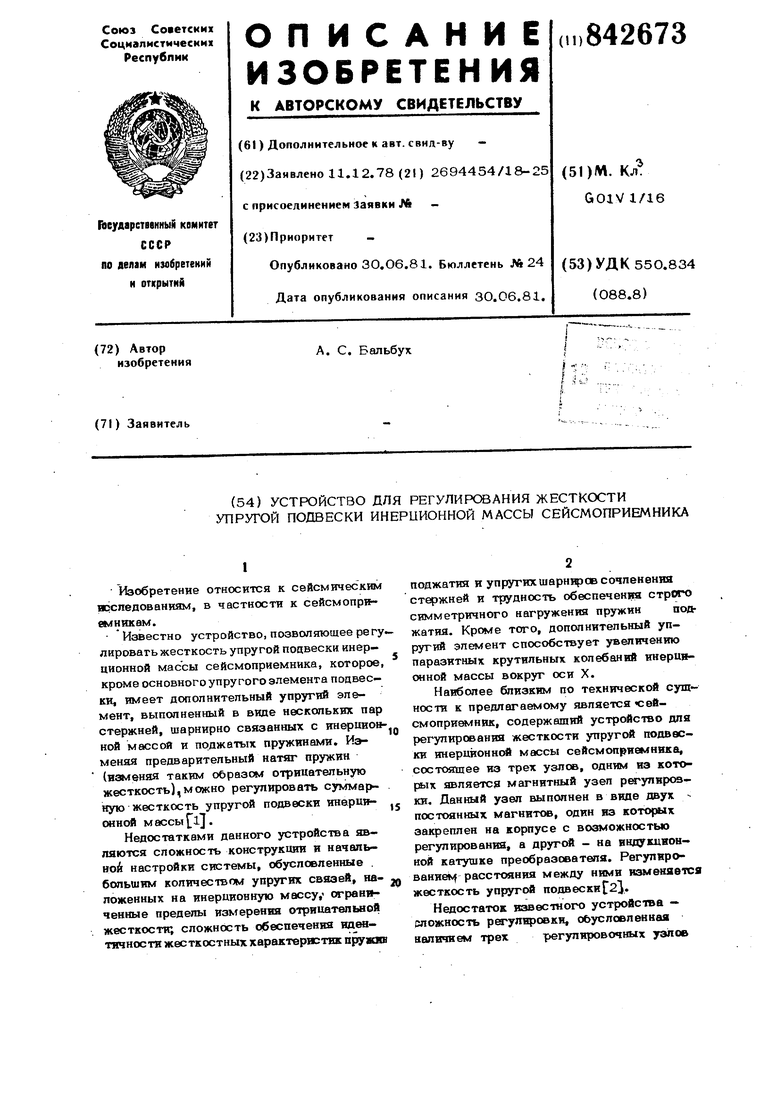

| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический сейсмоприемник | 1979 |
|
SU918915A1 |
| Электродинамический сейсмоприемник | 1982 |
|
SU1056105A1 |
| Электродинамический сейсмоприемник | 1979 |
|
SU855580A1 |
| ВИБРАЦИОННЫЙ ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2010 |
|
RU2439771C1 |
| Акселерометр | 1979 |
|
SU883745A1 |
| Сейсмоприемник | 1987 |
|
SU1509771A1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| Сейсмоприемник | 1982 |
|
SU1056104A1 |
| СЕЙСМОМЕТР | 2008 |
|
RU2386151C1 |
| Сейсмоприемник | 1974 |
|
SU575592A1 |
flo/igsKtHuu равновесия
