(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ НЕГАБАРИТНОСТИ ПОДВИЖНОГО ОБЪЕКТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения негабаритности рельсового подвижного объекта | 1989 |
|
SU1794737A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2018 |
|
RU2706079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631783C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗОН И СТЕПЕНЕЙ НЕГАБАРИТНОСТИ ГРУЗОВ НА ОТКРЫТОМ ПОДВИЖНОМ СОСТАВЕ С ПОМОЩЬЮ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2355595C1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 2004 |
|
RU2258600C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ЛЕДНИКА | 2007 |
|
RU2362971C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2008 |
|
RU2385481C1 |
1
Изобретение относится к железнодорожному транспорту, вчастности к определению габаритной проходимости подвижного состава.
Известно устройство для определения негабаритности подвижного объекта, содержащее датчики ветикальных и датчики горизонтальных ускорений, связанные с преобразователями соответственно вертикальных и горизонтальных ускорений в линейные перемещения, первый из которых связан с блоком определения вертикальных перемещений точки подвижного состава, а второй - с блоком определения горизонтальных перемещений точки подвижного состава 1.
Недостатком- этого устройства является отсутствие возможности определения пространственных , перемещений любой точки кузова подвижного состава без обязательной установки датчиков в этой точке, что снижает точность.
Цель изобретения - повышение точности.
Поставленная цель достигается тем, что устройство снабжено соединенным с вь1ходами преобразователей вертикальных ускорений блоком определения угла бокового наклона подвижного объекта, корректирующим, элементом и блоками умножения, которые включены между выходами указанных преобразователей и входами соответственно
5 блока определения вертикальных перемещений и блока определения горизонтальных перемещений, а между выходом датчика горизонтальных ускорений и входом соответствующего преобразователя включен
10 корректирующий элемент, к которому подключен блок определения угла наклона.
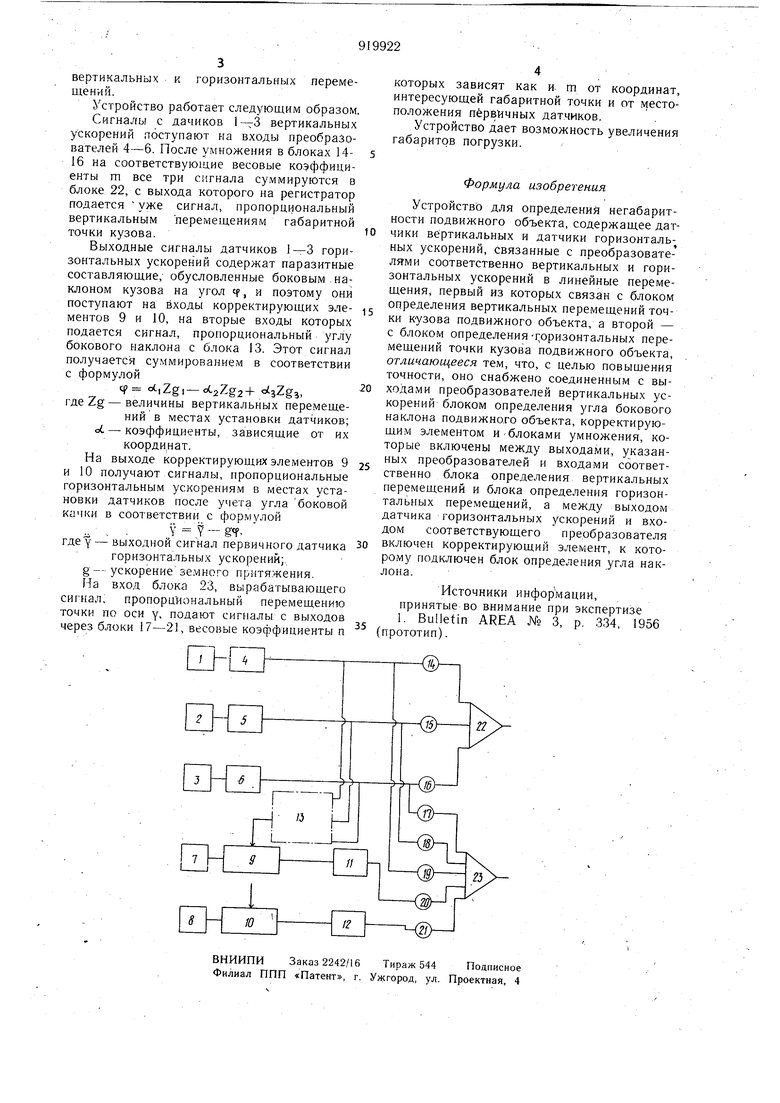
На чертеже показана принципиальная схема устройства.
Устройство содержит датчики 1-3 вертикальных ускорений, подключенные к преобразователям 4-6 вертикальных ускорений в линейные перемещения, датчики 7 и 8 горизонтальных ускорений, подключенные к корректирующим элементам 9 и 10, к которым подключены преобразователи 11 и 12
20 горизонтальных ускорений в линейные перемещения и блок 13 определения угла бокового наклона подвижного объекта, блоками 14-21, умножения, подключенными к блока-м 22 и 23 соответственно определения
