Изобретение относится к области железнодорожного транспорта, в частности к дистанционному контролю габаритов и правильности размещения перевозимого груза на открытом подвижном составе, а также к области определения координат объектов по изображениям, зарегистрированным телевизионными фотоприемными устройствами.
Известен способ для контроля негабаритности грузов на подвижном составе, в котором используют вертикальные стойки с поворотными элементами, образующими контур габарита погрузки и установленными независимо друг от друга, при этом поворотные элементы снабжают датчиками угла поворота, которые электрически соединяют с блоком электронной обработки сигналов и механическими компенсаторами, состоящими из шарнирно закрепленных корпусов (SU 432028 А, В61К 9/02, 02.10.1972).
Недостаток способа связан с тем, что контакт с негабаритным грузом происходит механически, с ударом. Это ограничивает скорость контролируемого поезда и срок эксплуатации контролирующих элементов.
Известен способ дистанционного контроля габаритов грузов, погруженных на подвижной состав, в процессе их движения, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, при этом определяют границы совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава и устанавливают оптоэлектронные датчики на указанных границах (RU 2249523 С1, В61К 9/02, 10.04.2005).
Известен способ коммерческого осмотра поездов и вагонов, реализованный в системе, содержащей П-образную несущую конструкцию, на которой размещены телевизионные камеры, оптоэлектронные датчики начала состава, счета вагонов, счета колесных пар, оптоэлектронные датчики контроля габаритности погрузки вагонов, установленные с возможностью контроля границ совмещенного зонального габарита погрузки и габарита подвижного состава и прожекторы. Выходы датчиков связывают с входами блока индикации и согласования, подключенного управляющим входом к выходу персональной электронно-вычислительной машины (ПЭВМ) автоматизированного рабочего места оператора. Выход блока индикации и согласования связывают с входом ПЭВМ. К выходу последней подключают монитор. Выходы всех телевизионных камер связывают с видеовходами ПЭВМ. Блок индикации и согласования выполняют с возможностью работы в автономном режиме (RU 2252170 С1, В61К 9/02, 20.05.2005).
Недостаток последних двух известных способов заключается в том, что габаритность погрузки определяют только по границе совмещенного зонального габарита погрузки и габарита подвижного состава при очертании бокового габарита погрузки по габариту подвижного состава, без привязки к зонам и степеням негабаритности грузов, принятым при эксплуатации железных дорог.
Известен способ для автоматизированного измерения координат точек внешней среды и построения ее трехмерной модели с использованием стереотелевизионной системы технического зрения. Способ реализуется в человеко-машинном измерительном комплексе, основу которого составляет система технического зрения, включающая телевизионный стереоблок, сопряженный с персональной электронно-вычислительной машиной (ПЭВМ) с дисплеем и пульт управления перемещением курсора. Оператор указывает с помощью курсора интересующую точку наблюдаемой сцены на экране дисплея ПЭВМ, а ее три пространственные координаты вычисляются автоматически с использованием программы на ПЭВМ и визуализируются на экране дисплея для оператора. Благодаря возможности выбора измеряемых точек повышается надежность их отождествления. Объединение измеренных точек в модель внешней среды происходит на основе их принадлежности к наблюдаемому объекту (выявляемой оператором), что повышает достоверность модели (RU 93033305 A, G01C 11/26, 27.10.1995).
Недостаток известного способа состоит в том, что он не позволяет оперативно выявить нарушения габарита в режиме реального времени, не дает указание наблюдающему оператору на нарушение, не акцентируют его внимание, а также не позволяет определить соответствие негабаритности груза зонам и степеням негабаритности грузов, принятым при эксплуатации железных дорог.
Наиболее близким к заявленному является способ дистанционного контроля негабаритности грузов на подвижном составе железнодорожного транспорта, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, заключающийся в проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот и сравнении габаритов погрузки с требуемыми габаритами погрузки подвижного состава, в каждой контролируемой плоскости устанавливают блок из двух пар оптоэлектронных датчиков "излучатель-приемник", измеряют время tп перекрытия оптического канала каждой пары "излучатель - приемник", измеряют скорость поезда Vп и вычисляют длину нарушения габарита по выражению L=Vп*tп, м, устанавливают, по крайней мере, по два приемника излучения в контролируемой плоскости на расстоянии So, а сопряженные с ними излучатели - максимально близко друг от друга, образуя оптические оси, расположенные под углом друг к другу, определяют координаты негабарита по уравнению Hi=Ho*(1-Vп*ti/So), где Hi - расстояние от линии размещения приемников излучения до негабарита в контролируемой плоскости, м, Но - расстояние от линии установки приемников до излучателей, м, ti - промежуток времени между началами процессов перекрытия обоих оптических каналов, мс. Затем по каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране видеомонитора наблюдения, акцентируют внимание оператора на нарушение с указанием места нарушения на телевизионном изображении единицы подвижного состава, полученном от видеокамер наблюдения, подают тревожный сигнал, регистрируют ответную реакцию оператора (RU 2311311 С2, В61К 9/02, 27.11.2007).
Недостаток указанного способа заключается в определении только вертикальной или горизонтальной координаты негабаритного груза в зависимости от плоскости контроля негабаритного груза. Способ не позволяет определить размер негабаритного груза, выходящего за контролируемую зону, установить соответствие негабаритности груза зонам и степеням негабаритности грузов, принятым при эксплуатации железных дорог, что является исключительно важным для обеспечения безопасности движения железнодорожного транспорта.
Задачей изобретения является обеспечение возможности оперативного обнаружения негабаритных грузов в вагонах на открытом подвижном составе, определение зон и степеней негабаритности грузов и установление их соответствия зонам и степеням негабаритности грузов, принятым при эксплуатации железных дорог.
Для решения поставленной задачи в способе определения зон и степеней негабаритности грузов на открытом подвижном составе с помощью телевизионных изображений, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, и заключающийся в проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, сравнении габаритов погрузки подвижного состава с требуемыми габаритами погрузки, определении вертикальной или горизонтальной координаты негабаритного груза в зависимости от плоскости контроля негабаритного груза, видеонаблюдении проходящего состава, передаче по каналам связи информации от оптоэлектронных датчиков о нарушении габаритов, визуализации ее на экране компьютерного монитора и подаче тревожного сигнала для привлечения внимания оператора на нарушение, с указанием зоны нарушения, - устанавливают не менее двух телевизионных камер в заданной области контроля зон и степеней негабаритности грузов, каждую из пар телевизионных камер располагают с возможностью охвата полем зрения всей области определения координат негабаритного груза, указывают с помощью оператора посредством курсора на экране компьютерного монитора персональной электронно-вычислительной машины (ПЭВМ) интересующую точку негабаритного груза, с использованием ПЭВМ, в которой зафиксированы координаты апертур объективов и границ видимых изображений от телевизионных камер, координаты предельных очертаний зон и степеней негабаритности грузов, принятых при эксплуатации железных дорог, автоматически вычисляют вертикальные и горизонтальные координаты негабаритного груза, определяют зоны степеней негабаритности грузов по вертикальной координате, а степени негабаритности грузов - по горизонтальной координате негабаритного груза, визуализируют полученную информацию на экране компьютерного монитора с указанием координат от оси пути и от уровня головки рельса до края негабаритного груза.
При обнаружении в поле зрения пары телевизионных камер негабаритного груза в любой контролируемой зоне габарита погрузки, указывают с помощью оператора посредством курсора на экране компьютерного монитора ПЭВМ интересующую точку негабаритного груза. Автоматически вычисляют вертикальные и горизонтальные координаты негабаритного груза и составляют уравнения прямых, проходящих через апертуру объектива и негабаритный груз для каждой телевизионной камеры

где х и у - координаты негабаритного груза в заданной системе координат, равнозначные для обоих уравнений прямых (х - расстояние от оси пути до негабаритного груза, у - высота негабаритного груза от уровня головки рельса),
x1 и у1 - координаты апертуры объектива первой телевизионной камеры ТК1,
x2 и у2 - координаты проекции негабаритного груза в заданной системе координат от первой телевизионной камеры ТК1,
x3 и у3 - координаты апертуры объектива второй телевизионной камеры ТК2,
x4 и у4 - координаты проекции негабаритного груза в заданной системе координат от второй телевизионной камеры ТК2.
На фиг.1 показан пример расположения координат апертур объективов, негабаритного груза и его проекций в контролируемой зоне.
Координаты x2 и x4 определяются подсчетом количества пикселей телевизионного изображения, содержащихся в промежутке от границы видимого размера изображений для телевизионных камер ТК1 и ТК2 до проекции негабаритного груза от каждой телевизионной камеры. Исходя из общего разрешения, которое приходится на полный размер изображения от каждой ТК, рассчитывается единичный размер, приходящийся на один пиксель, далее определяют координаты х2 и x4.
Путем решения системы уравнений определяют вертикальные и горизонтальные координаты х и у негабаритного груза, определяют зоны степеней негабаритности грузов по вертикальной координате, а степени негабаритности грузов по горизонтальной координате негабаритного груза, визуализируют данную информацию на экране компьютерного монитора с указанием координат от оси пути и от уровня головки рельса до негабаритного груза.
На фиг.2 представлена схема варианта размещения оборудования на П-образной несущей конструкции для осуществления способа определения, например, верхней, совместной верхней и боковой, боковой зон и степеней негабаритности грузов на открытом подвижном составе с одной стороны от оси пути с помощью телевизионных изображений. Цифрами 1-6 обозначены степени негабаритности погрузки, равнозначные для каждой из сторон состава от оси пути.
Реализация способа возможна в системе, содержащей П-образную несущую конструкцию, на которой размещают телевизионные камеры (ТК), оптоэлектронные датчики счета вагонов, оптоэлектронные датчики контроля границ габарита погрузки подвижного состава (Д) в соответствующих плоскостях, выходы всех телекамер связывают с соответствующими видеовходами персональной электронной вычислительной машины (ПЭВМ) оператора автоматизированного рабочего места, выходы всех оптоэлектронных датчиков связывают с приемо-передающим устройством обработки сигналов, выход которого связывают с ПЭВМ оператора, последнюю выполняют с возможностью вывода на экран компьютерного монитора в реальном масштабе времени информации о негабаритностях грузов в вагонах проходящего состава, видеоизображения проходящего состава с телекамер в режиме "ПОЛИЭКРАН", а также полноэкранного просмотра состава с одной выбранной телекамеры. Осуществляют звуковую индикацию зон негабаритности по границам погрузки подвижного состава, маркируют вагон с негабаритным грузом, записывают на жесткий диск сжатое видеоизображение с телевизионных камер и создают видеоархив с возможностью воспроизведения видеозаписи.
Техническим результатом способа является обеспечение безопасности движения подвижного состава за счет своевременного выявления негабаритных грузов в составе в процессе контроля зон и степеней негабаритности грузов на открытом подвижном составе с помощью телевизионных изображений.
Изобретение относится к области железнодорожного транспорта, в частности к дистанционному контролю габаритов и правильности размещения перевозимого груза на открытом подвижном составе (ПС). Способ включает в себя определение зон и степеней негабаритности грузов с помощью телевизионных изображений, контроль соблюдения границ габаритности погрузки при проведении ПС через зону контроля, образованную оптическими границами датчиков габаритных ворот, видеонаблюдение проходящего ПС. Телевизионные камеры размещают попарно в заданной области контроля зон и степеней негабаритности грузов. Оптоэлектронные датчики устанавливают по границам габарита погрузки ПС. По каналам связи передают информацию о нарушении габаритов, визуализируют ее на экране компьютерного монитора персональной электронно-вычислительной машины (ПЭВМ) оператора. Для привлечения внимания оператора на нарушение подают тревожный сигнал с указанием зоны нарушения. С помощью курсора на экране компьютерного монитора указывают интересующую точку негабаритного груза, а координаты негабаритного груза вычисляют автоматически с использованием ПЭВМ. Зоны степеней негабаритности грузов определяют по вертикальной координате, а степени негабаритности грузов - по горизонтальной координате негабаритного груза. Полученную информацию визуализируют на экране компьютерного монитора с указанием координат от оси пути и от уровня головки рельса до края негабаритного груза. Техническим результатом является обеспечение безопасности движения ПС за счет своевременного выявления негабаритных грузов в составе в процессе контроля зон и степеней негабаритности грузов на ПС с помощью телевизионных изображений. 2 ил.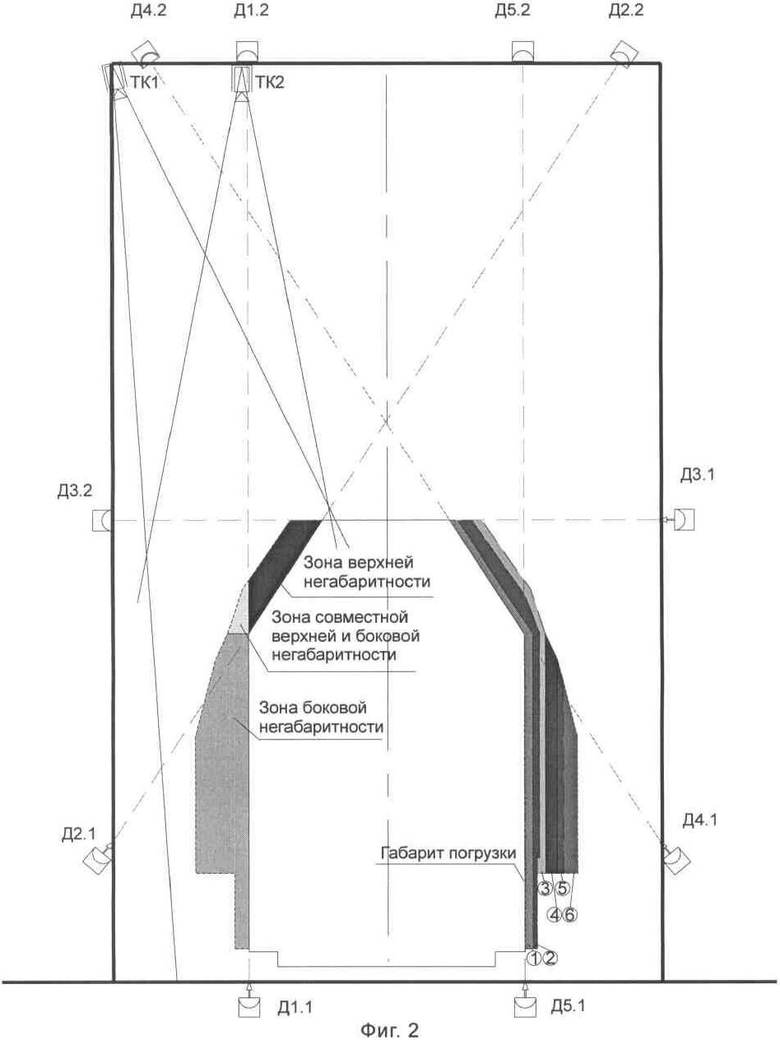
Способ определения зон и степеней негабаритности грузов на открытом подвижном составе с помощью телевизионных изображений, включающий контроль соблюдения границ габаритности погрузки при входе состава в зону контроля с помощью оптоэлектронных датчиков и определение негабаритности грузов, и заключающийся в проведении состава через зону контроля, образованную оптическими границами датчиков габаритных ворот, сравнении габаритов погрузки подвижного состава с требуемыми габаритами погрузки, определении вертикальной или горизонтальной координаты негабаритного груза в зависимости от плоскости контроля негабаритного груза, видеонаблюдении проходящего состава, передаче по каналам связи информации от оптоэлектронных датчиков о нарушении габаритов, визуализации ее на экране компьютерного монитора и подаче тревожного сигнала для привлечения внимания оператора на нарушение, с указанием зоны нарушения, отличающийся тем, что устанавливают не менее двух телевизионных камер в заданной области контроля зон и степеней негабаритности грузов, каждую из пар телевизионных камер располагают с возможностью охвата полем зрения всей области определения координат негабаритного груза, указывают с помощью оператора посредством курсора на экране компьютерного монитора персональной электронно-вычислительной машины (ПЭВМ) интересующую точку негабаритного груза, с использованием ПЭВМ, в которой зафиксированы координаты апертур объективов и границ видимых изображений от телевизионных камер, координаты предельных очертаний зон и степеней негабаритности грузов, принятых при эксплуатации железных дорог, автоматически вычисляют вертикальные и горизонтальные координаты негабаритного груза, определяют зоны степеней негабаритности грузов по вертикальной координате, а степени негабаритности грузов - по горизонтальной координате негабаритного груза, визуализируют полученную информацию на экране компьютерного монитора с указанием координат от оси пути и от уровня головки рельса до края негабаритного груза.
| СПОСОБ И СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ НЕГАБАРИТНОСТИ ГРУЗОВ НА ПОДВИЖНОМ СОСТАВЕ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2006 |
|
RU2311311C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ВНЕШНЕЙ СРЕДЫ ДЛЯ ПОСТРОЕНИЯ ЕЕ ТРЕХМЕРНОЙ МОДЕЛИ В СТЕРЕОТЕЛЕВИЗИОННОЙ СИСТЕМЕ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 1993 |
|
RU2065133C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА ПОЕЗДОВ И ВАГОНОВ (АСКО ПВ) | 2004 |
|
RU2252170C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ И СИСТЕМА ЭЛЕКТРОННЫХ ГАБАРИТНЫХ ВОРОТ ДЛЯ ДИСТАНЦИОННОГО КОНТРОЛЯ ГАБАРИТОВ ГРУЗОВ, ПОГРУЖЕННЫХ НА ПОДВИЖНОЙ СОСТАВ, В ПРОЦЕССЕ ИХ ДВИЖЕНИЯ | 2004 |
|
RU2249523C1 |

