(54) ВИБРОИЗОЛЙРУЮЩАЯ ОПОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующая опора | 1976 |
|
SU581345A1 |
| ОПОРА С АКТИВНОЙ ВИБРОИЗОЛЯЦИЕЙ | 2004 |
|
RU2268421C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАРЕЗНОГО СТРЕЛКОВОГО ОРУЖИЯ И РЕАЛИЗУЮЩЕЕ УСТРОЙСТВО | 2015 |
|
RU2603334C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Преобразователь ток-напряжение | 1987 |
|
SU1525866A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГОНА ТРАНСПОРТНОГО СРЕДСТВА И ПРОТИВОУГОННАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2084361C1 |
| ЭЛЕКТРОУТЮГ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2043442C1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| Стабилизированный преобразователь постоянного напряжения | 1984 |
|
SU1244760A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
: -
Изобретение относится к машиностроению, а именно к активным виброзашит ным системам.
По основному авт, св. № 581345 известна виброизолирующая опора, содержащая платформу для установки изолируемого объекта, устанавливаемый на вибрирутошем основании электромеханический преобразователь с двигателем и подвижным штоком, опорную головку, взаимодействуюшую с платформой, установленный на платформе блок вибро- датчиков и цепь управления, опора кроме того снабжена блоком пьезоэлементов, установленным между подвижным штоком и опорной головкой, и включенным в цепь управления усИлительно-корректируюшим устройством, вход которого соединен с блоком вибродатчиков, а выходы - соответственно, с двигателем и блоком пьезоэлементов 1 ,
Недостатками известной опоры являются низкая точность стабилизации положения и значительные вибрационные
колебания опоры, а следовательно, и стабилизируемой платформы из-за длительного времени включения двигателя и электромеханического преобразователя в процессе стабилизации платформы, так как перемещение штока происходит в данном случае по экспоненциальному закону.
Цель изобретения - повьпиение точности стабилизации и уменьшение вибра10ционных колебаний опоры.
Поставленная цель достигается тем, что усилительно-корректирующее устройство опоры содержит формирователь управления блоком пьезоэлемен15тов, первый и второй источники напряжения питания двигателя, последовательно соединенные первые источник спорного напряжения, компаратор, реле времени и ключ и последовательно соединенные
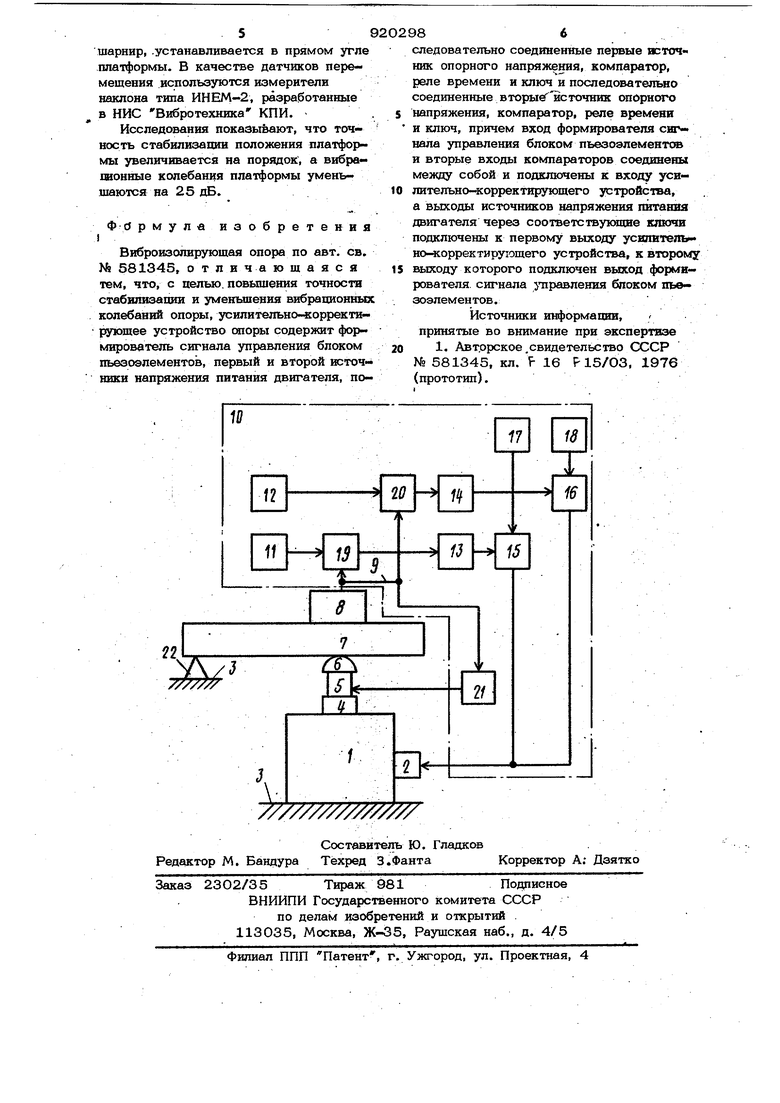
вторые источник опорного напряжения, компаратор, реле времени и кдюч, причем вход формирователя сигнала управления блоком пьезоэлементов и вторые входы компараторов соединены между собой и подключены к входу усилитель но-корректирующего устройства, а выходы источников напряжения питания двигателя через соотв.етстъующие ключи , подключены к первому выходу усилительно-корректирующего устройства, к второму выходу которого подключен выход формирователя сигнала управления блоком пьеаоэлементов. На чертеже приведена принципиальяая схема опоры. Схема содержит электромеханический преобразователь 1, кинематически связанный с двигателем 2. Преобразовател устанавливается на основании 3. На под вижном штоке 4 прюобразователя 1 через блок пьезоэлементов 5 закреплена опорная головка 6, на которую опирается платформа 7. На платформе распОложен блок .вибродатчиков,8, соединенный цепью управления 9 с входом усилитель но-«орректирующего устройства 10, выходы которого роединены с двигателем 2 и блоком пьезоэлементов 5. Качество пьезокерамнческих элементов в блоке 5 зависит от необходимой амплитуды регулирования. Усилительно-корректирузощее устройство 10 содержит первый и второй источники опорного напряжения 11 и 12, первое и второе реле времени 13 н 14 первый и второй ключи 15 и 16, первый и второй источники напряжения питания двигателя 17 и 18, первый и второй компаратор 19 и 20, формирователь 2 сигнала управления блоком пьезоэлементов.. Второй конец стабилизируемой плат формы опирается на шарнирную опору 22 усггановленную на основании 3. Управление перемещением платформы осуществляется с помощью последовательно соединенных электромеханического привода, cocTosmiero из двигателя 2 электромеханического преобразователя и штока 4,и блока пьезоэлементов 5. Первый позволяет осуществлять грубое перемещение платформы 7, второй осуществляет точную стабилизацию платформы 7 относительно основания 3. При горизонтальном положении платформы 7 напряжение на выходе блока вибродатчиков 8 равно нулю и подвижные элементы блока пьезоэлементов 5 R электромеханического преобразователе 1 :к|аходятся в среднем попожейин. При отклонении платформы 7 от горизонтального положения, например, вверх на выходе блока вибродатчиков 8 формируется отрицателыюе напряжение, которое через формирователь 14 сигнала управления воздействует на блок пьезоэлементов таким образом, чтобы платформа 7 перемещалась вниз. Полученный отрицательный выходной сигнал .блока вибродатчиков 8 сравнивается в , боми&раторе 19 с выходным напряжё нием источника опорного напряжения 11, которое соответствует максимально до- . пустямому перемещению бпока ггьезо- элементов 5 вниз от горизонтального положения. В случае равенства напряжения источника 11 и блока вибродатчиков 8 на выходе компаратора 19 формируется импульс, который включает реле времени 13. Реле времени l- открывает ключ 15, который подключает источник напряжения питания 17 к входу двигателя 2. Время подключения источника питания 17 к входу двигателя 2 задается с помощью реле времени 13. Оно равно, например, трем с. Величина выходного напряжения источника 17 соответствует максимальному перемещению подвижного штока 4 (т. е. подвижного элемента преобразователя 1) вниз от горизонтального положения. При .отклонении платформы 7 от горизонтального положения вниз в работу включаются блоки 12, 20, 14, 16 и 18 усилительно-корректирующего устройства 1О и процесс стабилизации происходит,аналогичным образом. Таким образом, при отклонении платформы 7 в одну или другую сторону от горизонталыюго положения опора позволяет с высокой точностью автоматически стабилизировать положение платформы 7. При этом такое подключение источника 17 {или 18) к двигателю 2 значительно уменьшает время включения электромеханического привода, что позволяет значительно уменьшить вибра1Шонные колебания. платформь 7, вызванные электромеханическим п риводом, а также повысить точность стабилизации положения платформы 7. , Эксперимёнтапьно-исследуется опытны оёразец опоры. Исследуется платформа 7, выполйенная в виде прямоуголтгного равнобедренного треугольника с катетами, равными 1,5 м. Платформа 7 устанавливается на трех опорах, две из которых .вибровзолирукшие, выполненные по описанному принципу. Виброизолирующиё опоры устанавливаются в острых углах платформы, а третья опорю, содержащая двухосный упругий
шарнир, .устанавливается в прямом угле платфорк« 1. В качестве датчиков перемещения используются измерители наклона типа ИНЕМ-2, разработанные в НИС Вибротехника КПИ.
Исследования показывают, что точность стабилизации положения платформы увеличивается на порядок, а вибрационные колебания платформы уменьшаются на 25 дБ.
Формула изобретения
Виброизолируюшая опора по авт. св. № 581345, отличающаяся тем, что, с целью, повышения точности стабилизации и уменьшения вибрационных колебаний опоры, усилительно-корректирующее устройство опоры содержит формирователь сигнала управления блоком пьезоэлементов, первый и второй источники напряжения питания двигателя, поп
,
///////
следовательно соединенные первые источник опорного напряжения, компаратор, реле времени и ключ и последовательно соединенные вторыеГисточник опорного
напряжения, компаратор, реле времени и ключ, причем вход формирователя сигнала управления блоком пьезоэлементов и вторые входы компараторов соединены между собой и подключены к входу уси-
лительно-корректирующего устройства, а выходы источников напряжения питания двигателя через соответствукяцие ключи подключены к первому выходу усилительнонкорректирующего устройства, к второму
выходу которого подключен выход формирователя сигнала отправления блоком пьезоэлементов.
Источники информации, принятые во внимание при экспертизе
1« Автррское,свидетельство СССР № 581345, кл. f 16 f 15/03, 1976 (прототип).
