(5) ШАГОВЫЙ ПРИВОД МАЛЫХ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитострикционный двигатель | 1980 |
|
SU911659A1 |
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
| Шаговый двигатель | 1980 |
|
SU920904A1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
| Магнитострикционный привод угловых перемещений | 1982 |
|
SU1078504A1 |
| Датчик магнитного поля | 1989 |
|
SU1749876A1 |
| МАГНИТОСТРИКЦИОННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ | 2000 |
|
RU2171921C1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2480710C2 |
| СИСТЕМА ТОПЛИВОПОДАЧИ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2195572C2 |
I
.Изобретение относится к электротехнике и может найти применение в приборостроении, в системах .автоматики и прецизионном станкостроении .
В настоящее время во многих областях техники появились прецизионные приборы, станки, измерительные машины и др,, в которых необходимо осуществлять малые и сверхмалые точные перемещения. Получить такие перемещения традиционными механическими или электромеханическими способами чрезвычайно трудно, ai подмас невозможно. Иагнитострикционный принцип позволяет исключить всякие промежуточные механическиепередачи и тем самым обеспечивает высокую чувствительность и большую механическую жесткость перемещения при значительных рабочих усилиях.Большое значение имеет создание шаговых приводов , обладающих большой надежностью и npocTofi конструкцией.
звестен привод малых угловых перемещений, содержащий основание, диск, установленный с возможностью вращательного движения и взаимодействующее с ним приводное устройство. Для увеличения частоты шагания приводное устройство выполнено из электрически деформируемого пьезокерамического материала в виде кольца, разделенного через 120 на равные
to части, пьезокерамических элементов, которые установлены на неподвижном основании и.закреплены на нем с одной стороны. Диск установлен таким образом, что соприкасается с пьезоэлектрическими элементами 1.
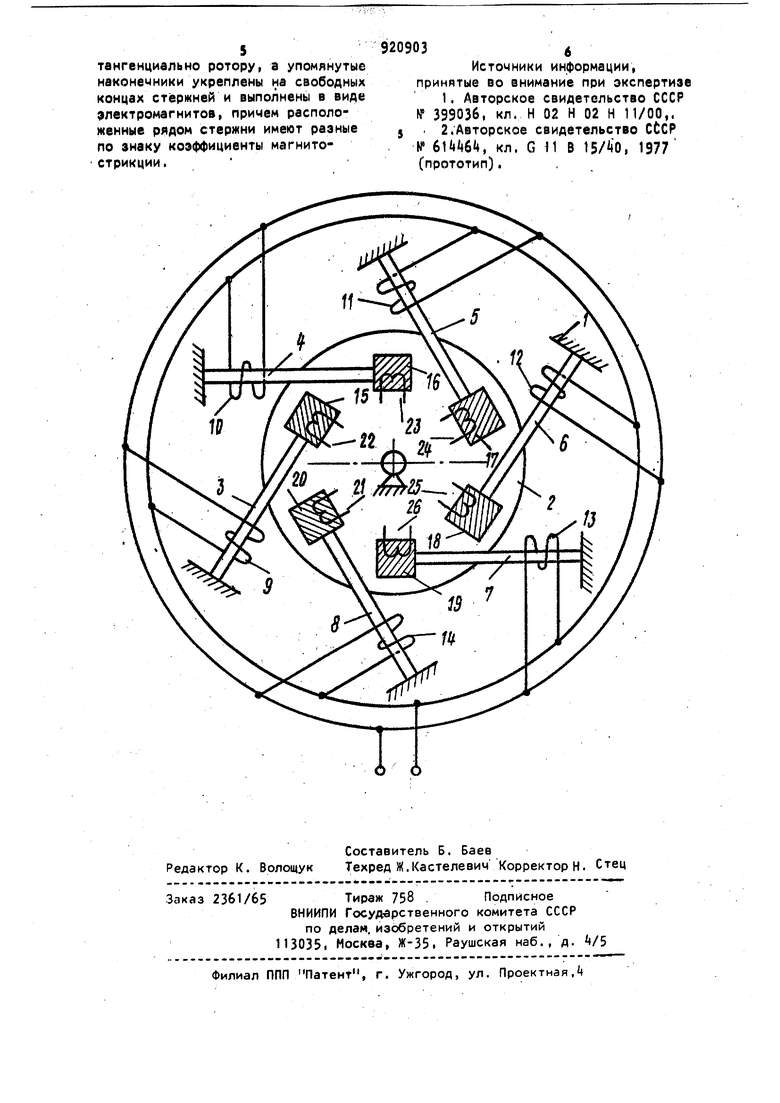
Недостатками известной конструкции являются невысокая надежность работы двигателя, обусловленная хрупкостью пьезокерамики, а также ее износом ввиду того, что пь.езокерамические элементы в процессе работы подвержены ударной нагрузке. Известен также шаговый привод малых угловых перемещений, содержащий меподшижное основание, ротор и электромеханический преобразователь, укрепленный на основании и сос тоящий из электрически деформируемых элементов, снабженных накоийчниками, сопряженными с ротором. В известном приводе ротор выполнен i виде кольца, а электромеханический преобразователь - в виде пьезокерамических стержней, образующих тре угольник, вершины которого соединены наконечниками, сопряженными с ротором фрикционно 2. Недостатком привода является малая надежность, обусловленная фрикционным взаимодействием наконечника с ротором и хрупкостью пьезоматериала стержней. Цель изобретения - повышение надежности привода. Указанная цель, достигается тем, что в шаговом приводе малых угловых Перемещений, содержащем неподвижное основание, ротор и электромеханический преобразователь, укрепленный на основании и состоящий из электрически деформируемых элементов, снабженных наконечниками, сопряженными с ротором, ротор выполнен в виде диска из ферромагнитного недеформируемого материала, электромеханический преобразователь выполнен в виде магнито стрикционных стержней, укрепленных консольно на основании, тангенциально р отору, а упомянутые наконечники укреплены на свободных концах стержней и выполнены в виде электромагнитов, причем расположенные рядом стержни имеют разные по знаку коэффициенты магнитрстрикции. На чертеже изображен шаговый при вод, общий вид. Привод содержит основание 1, диск 2 из ферромагнитного материала установленный с возможностью вращательного движения, и электромеханический преобразователь, выполненный из шести магнитострикционных стержней 3-8 с соединенными параллельно обмотками возбуждения Каждый из стержней жестко соединен с одной стороны с основанием 1, а с другой со своим электромагнитным зажимом соответственно 15-20. Электромагнит ные зажимы снабжены обмотками возбу дения 21-26, каждые три из которых через один соединены параллельно. Магнитострикционные стержни 3,5 и 7 выполнены из материала с положительным коэффициентом магнитострикции, а элементы it,6 и 8 с .отрицательным коэффициентом магнитострикции. В исходном состоянии подается ток в обмотки возбуждения 21, 23 и 25, последние притягиваются к диску 2 и удерживаются на нем. При пропус,кании тока по обмоткам возбуждения -1 магнитострикционных Стержней Зт8 стержни ,6 и 8 сокращаются, а стержни 3,5 и 7 увеличивают свои линейные размеры, поворачивая диск по часовой стрелке на некоторый угол. Затем Фиксируются.зажимы 22, и 26, а зажимы 21,23 и 25 отпускаются. При отключении тока в обмотках возбуждения 9-1 магнитострикционных стержней 3-8, стержни 3,5 и 7 сокращаются, а стержни +,6 и В .увеличивают свои линейные размеры, поворачивая диск по часовой стрелке на некоторый угол. Повторение шагов ПРОИСХОДИТ описанным образом. Реверс шагового привода осуществляется изменением порядка включения зажимов. Технические преимущества изобретения по сравнению с известным заключаются в повышении надежности работы за счет жесткого соединения зажимов с ротором. Износ зажима и Диска ротора в процессе работы практически не влияет на изменение усилия закрепления, чём повышается долговечность работы устройства.. Формула изобретения Шаговый привод малых угловых перемещений, содержащий неподвижное основание, ротор и электромеханический преобразователь, укрепленный на основании и состоящий из электрически деформируемых элементов, снабженных наконечниками,сопряженными с роТором, отличающийс я тем, что, с целью повышения надежности, ротор выполнен в виде диска из ферромагнитного недеформируемого материала, электромеханический преобразователь выполнен в виде магнитострикционных стержней, укрепленных консольно на основании
тангенциально ротору, а упомянутые наконечники укреплены на свободных концах ст(гржней и выполнены в виде электромагнитов, причем расположенные рядом стержни имеют разные по знаку коэффициенты магнитострикции.
920903j
Источники информации, принятые во внимание при экспертизе 1, Авторское свидетельство СССР № 399036, кл. Н 02 Н 02 Н 11/00,. 5 2.Авторское свидетельство СССР Vf , кл. СИВ IS/iO, 1977 (прототип).
