(54) МАГННТОСТРИКЦИОННЫЙ ДВИГАТЕЛЬ
1
Изобретение относится к электротехнике и может быть использовано в устройствах, где необходимо обеспечение очень малой постоянной скорости, в частности, в системах электропривода метрологических установок, в высокоточных станках,В системах автоматики.
Известно устройство, состоящее из статора и якоря. Статор выполнен п-образным из магнитострикционного материала с обмоткой возбуждения и двумя зажимами, один из которых установлен неподвижно, а якорь выполнен в виде стержня. Реверс устройства осуществ.пяется при изменении порядка чередования включения зажимов ,1}.
Недостатке известной конструкции является то, что она имеет ограниченную величину перемещения рабочего органа, которая определяется длиной стержня, при этом невозможно получить перемещения якоря с постоянной скоростью, что обусловлено принципом действия устройства, обеспечивающим шаговое перемещение.
Известен также магнитострикционный двигатель, содержащий статор из ферромагнитного материала в виде :плоской плиты И якорь В виде электромагнитных зажимов, жестко соединенных магнитострикционнсш стержнем/ снабженным обмоткой возбуждения f2j.
с Недостатком известной конструкции является отсутствие возможности обеспечения перемещения якоря с постоянной скоростью, что обусловлено шаговым характером перемещения.
|п Цель изобретения - получение постоянной скорости перемещения.
указанная цель достигается тем, ЧТО магнитострикционный двигатель, содержащий статор из ферромагнитного 5 ,материа1ла в виде плоской плияа и
якорь в виде электромагнитных зажимов, жестко соединенных магнитострйкционным стержнем, снабженным обмоткой возбуждения, дополнительно содержит
20 компенсатор, выполненный в виде второго магнитострикционного стержня с коэффициентом магнитострикций обратнЬго знака, снабженного компенсационной обмоткой, который расположен
25 по оси первого стержней и жестко прикреплен к одному из зажимов, а компенсационная обмотка включена последовательно с обмоткой возбуждения.
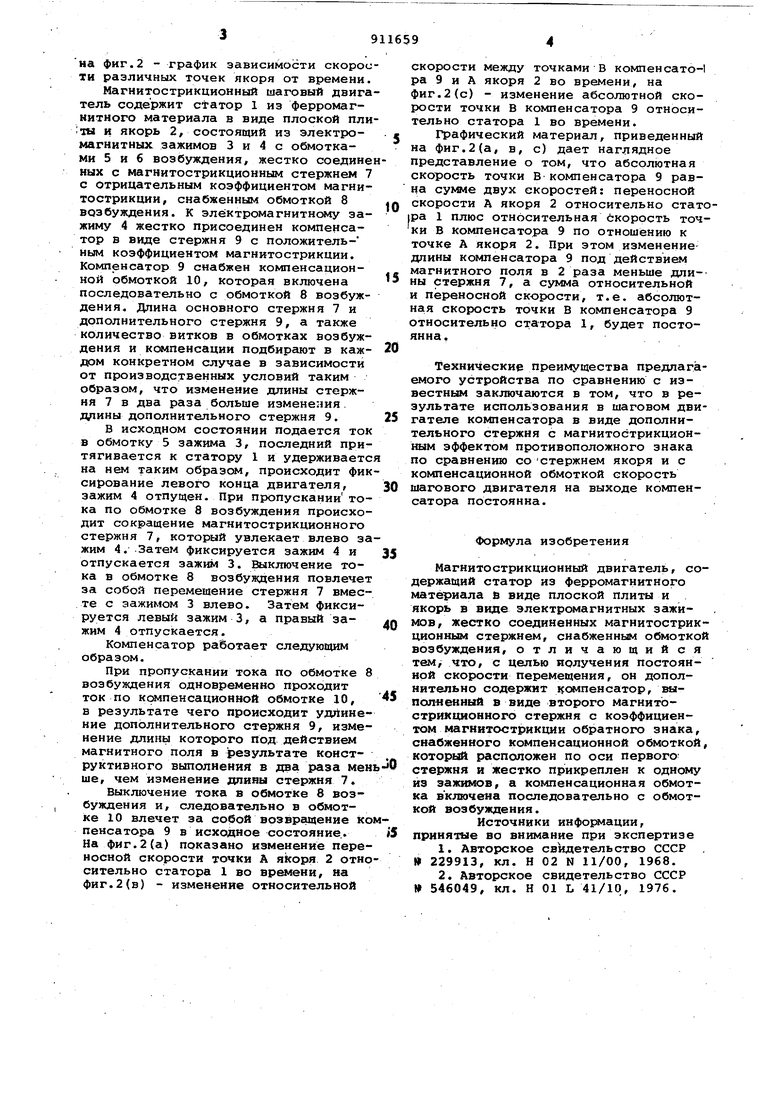
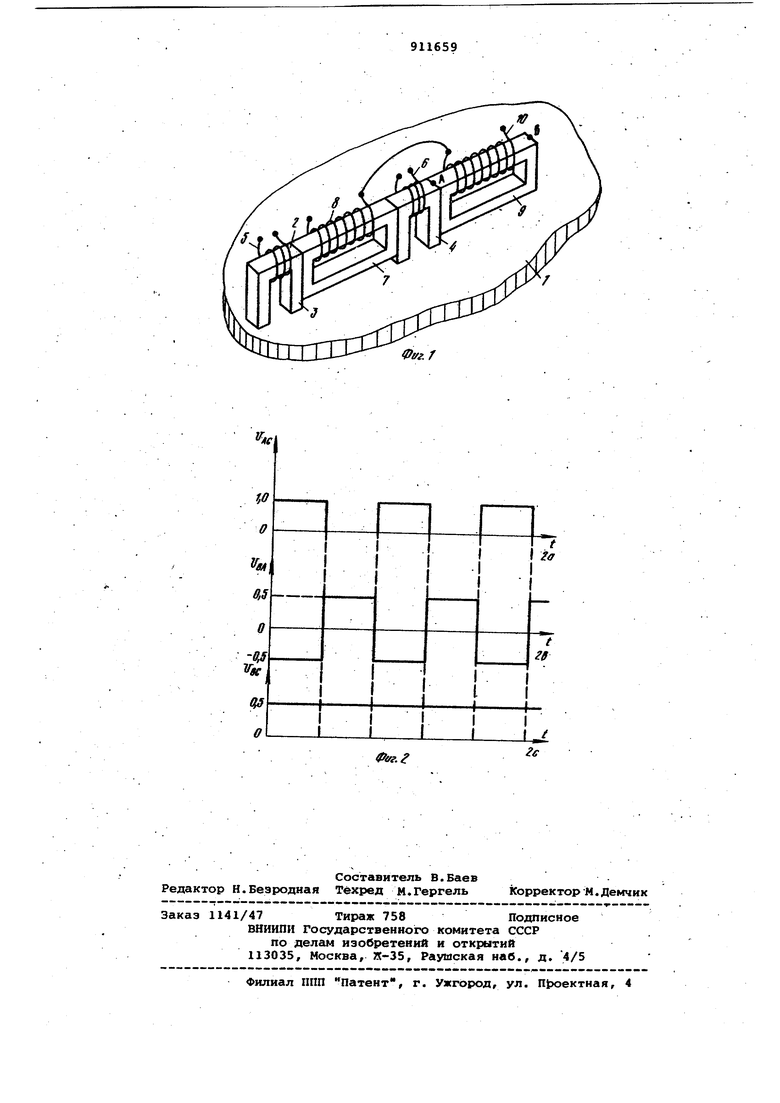
На фиг.1 изображен магнитострик30д1рнный двигатель, общий вид; на / на фиг.2 - график зависимости скорос ти различных точек якоря от времени Магнитострикционный шаговый двига тель содержит статор 1 из ферромагнитного материала в виде плоской пли ;ты и якорь 2, состоящий из злектромагнитных зажимов 3 и 4 с обмотками 5 и 6 возбуждения, жестко соедине ных с магнитострикционным стержнем 7 с отрицательным козффициентом магнитострикции, снабженным обмоткой 8 возбуждения. К злёктромагнитнсялу зажиму 4 жестко присоединен компенсатор в виде стержня 9 с положительным козффициентом магнитострикции. Компенсатор 9 снабжен компенсационной обмоткой 10, которая включена последовательно с обмоткой 8 возбуждения. Длина основного стержня 7 и дополнительного стержня 9, а также количество витков в обмотках возбуждения и компенсации подбирают в каж дом конкретном случае в зависимости от производственных условий таким образом, что изменение длины стержня 7 в два раза больше изменения длины дополнительного стержня 9. В исходном состоянии подается то в обмотку 5 зажима 3, последний при тягивается к статору 1 и удерживает на нем таким образом, происходит фи сирование левого конца двигателя, зажим 4 отпущен. При пропускании то ка по обмотке 8 возбуждения происхо дит сокращение магнитострикционного стержня 7, который увлекает влево з жим 4. Затем фиксируется зажим 4 и отпускается зажим 3. Выключение тока в обмотке 8 возбуждения повлече за собой перемещение стержня 7 вмес те с зажимом 3 влево. Затем фиксируется левый зажим 3, а правый зажим 4 отпускается. Компенсатор работает следующим образом. При пропускании тока по обмотке возбуждения одновременно проходит ток по компенсационной обмотке 10, в результате чего происходит удйине ние дополнительного стержня 9, изме нение длины которого под действием магнитного поля в результате конструктивного выполнения в два раза ме ше, чем изменение длины стержня 7. Выключение тока в обмотке 8 возбуждения и, следовательно в обмотке 10 влечет за собой возвращение к пенсатора 9 в исходное состояние.. На фиг.2(а) показано изменение пере носной скорости точки А яКоря 2 отн сительно статора 1 во времени, на фиг.2(в) - изменение относительной скорости между точкамиВ компенсато-1 ра 9 и А якоря 2 во времени, на фиг.2(с) - изменение абсолютной скорости точки В компенсатора 9 относительно статора 1 во времени. Графический материал, приведенный на фиг.2(а, в, с) дает наглядное представление о том, что абсолютная скорость точки В компенсатора 9 равна сумме двух скоростей: переносной скорости А якоря 2 относительно статоpa 1 плюс относительная скорость точки В компенсатора 9 по отношению к точке А якоря 2. При зтом изменениедлины компенсатора 9 под действием магнитного поля в 2 раза меньше дли-ны стержня 7, а сумма относительной и переносной скорости, т.е. абсолютная скорость точки В компенсатора 9 относительно статора 1, будет постоянна. Технические преимущества предлагаемого устройства по сравнению с известным заключаются в том, что в результате использования в шаговом двигателе компенсатора в виде дополнительного стержня с магнитострикционным эффектом противоположного знака по сравнению со-стержнем якоря и с компенсационной обмоткой скорость шагового двигателя на выходе компенсатора постоянна. Формула изобретения Магнитострикционный двигатель, содержащий статор из ферромагнитного материала в виде плоской плиты и якорь в виде электромагнитных зажимов, жестко соединенных магнитострикционным стержнем, снабженным обмоткой возбуждения, отличающийся тем что, с целью получения постоянной скорости перемещения, он дополнительно содержит ксмпенсатор, выпол«енный в виде второго магнитострикционного стержня с козффициентом магнитострикции обратного знака, снабженного компенсационной обмоткой, который расположен по оси первогостержня и жестко прикреплен к одному из зажимов, а компенсационная обмотка включена последовательно с обмоткой возбуждения. Источники информации, принятые во внимание при зкспертизе 1.Авторское свидетельство СССР 229913, кл. Н 02 N 11/00, 1968. 2.Авторское свидетельство СССР 546049, кл. Н 01 L 41/10, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый двигатель | 1980 |
|
SU920904A1 |
| Шаговый привод малых угловых перемещений | 1980 |
|
SU920903A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРИВОД МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1972 |
|
SU428910A1 |
| Магнитострикционный шаговый двигатель | 1980 |
|
SU835287A1 |
| Магнитострикционный шаговый двигатель линейных перемещений | 1986 |
|
SU1369619A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2003 |
|
RU2231897C1 |
| Магнитострикционный шаговый двигатель угловых перемещений | 1982 |
|
SU1091792A1 |
| Магнитострикционный привод малых поступательных перемещений, в частности для врезной подачи шлифовальной бабки | 1960 |
|
SU141075A1 |
| Способ управления линейным шаговым двигателем | 1987 |
|
SU1542375A1 |
| МАГНИТОСТРИКЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2074456C1 |
2e
Фог.г
