(5) ЛОВИТЕЛЬ КАРЕТОК НА СПУСКЕ ПОДВЕСНЫХ КОНВЕЙЕРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель кареток на спуске подвесных конвейеров | 1988 |
|
SU1525092A1 |
| Ловитель кареток на спуске подвесного конвейера | 1984 |
|
SU1217745A1 |
| Устройство для улавливания кареток на спуске подвесного конвейера | 1983 |
|
SU1104077A1 |
| ЛОВИТЕЛЬ НА СПУСКЕ ПОДВЕСНЫХ КОНВЕЙЕРОВ | 1971 |
|
SU423718A1 |
| Ловитель кареток на наклонных участках подвесного конвейера | 1983 |
|
SU1129149A1 |
| Ловитель тягового органа конвейера | 1978 |
|
SU1016247A1 |
| Ловитель кареток подвесного конвейерапРи ОбРыВЕ ТягОВОгО ОРгАНА | 1979 |
|
SU835903A1 |
| Ловитель кареток подвесного конвейера | 1981 |
|
SU1034966A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Ловитель цепи на спуске подвесного конвейера | 1986 |
|
SU1366458A1 |
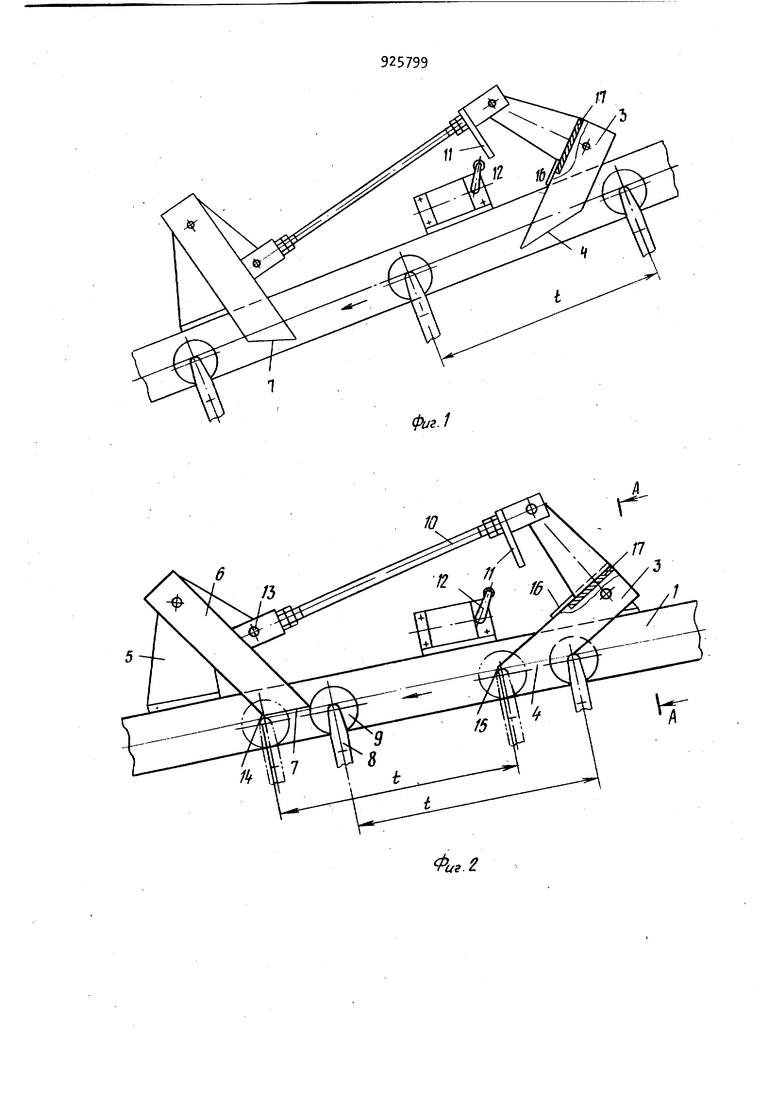
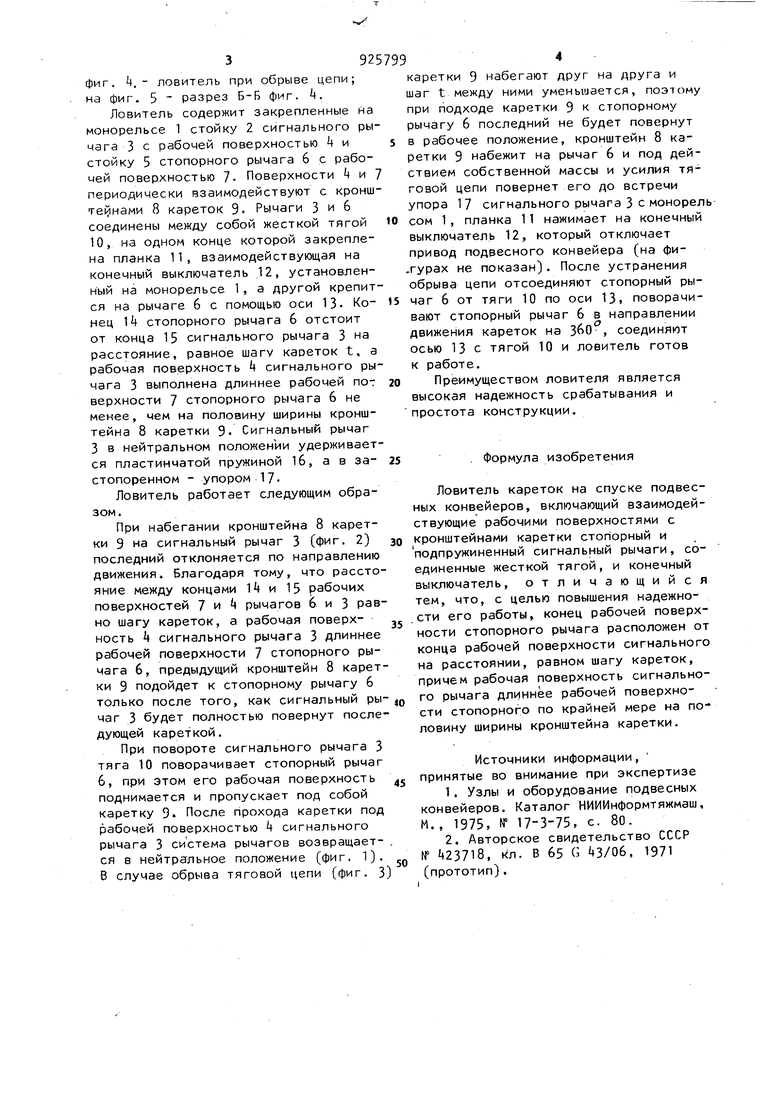
Изобретение относится к области подъемно-трансгтортного оборудования, а именно к подвесным конвейерам. Известны ловители кареток на спуске подвесных конвейеров, содержащие сигнальный и стопорный рычаги, а также конечный выключатель t. Ближайшим техническим решением к изобретению является ловитель на спуске подвесных конвейеров, содержащий подпружиненный сигнальный рычаг, соединенный жесткой тягой со стопорным рычагом, и подпружиненный шток для освобождения рычага после- устранения обрыву цепи 2j. Известные устройства работают на принципе контроля измерения скорости движения кареток при обрыве цепи, а это обуславливает трудность настройки ловителей на различных участках конвейера, имеющего различные уклоны состояния рабочей поверхности пути, массы груза и т. д. Целью изобретения является создание простого и надежного в работе ловителя на спуске подвесных конвейеров, способного работать независимо от скорости движения кареток. . Указанная цель достигается тем, что в ловителе кареток на спуске подвесных конвейеров, включающем взаимодействующие рабочими поверхностями с кронштейнами каретки стопорный и подпружиненный сигнальный рычаги, конец рабочей поверхности стопорного рычага расположен от конца рабочей поверхности сигнального рычага на расстоянии, равном шагу кареток, причем рабочая поверхность сигнального рычага длиннее рабочей поверхности стопорного по крайней мере на половину ширины кронштейна каретки. На фиг. 1 изображен ловитель в нейтральном положении, вид сбоку; на фиг. 2 - то же в рабочем положении; на фиг. 3 - разрез А-А на фиг. 2; на
фиг. , - ловитель при обрыве цепи; на фиг. 5 - разрез Б-В фиг. 4.
Ловитель содержит закрепленные на монорельсе 1 стойку 2 сигнального рычага 3 с рабочей поверхностью i| и стойку 5 стопорного рычага 6 с рабочей поверхностью 7- Поверхности 4 и 7 периодически взаимодействуют с кронштейнами 8 кареток 9. Рычаги 3 и 6 соединены между собой жесткой тягой 10, на одном конце которой закреплена планка 11, взаимодействующая на конечный выключатель 12, установленный на монорельсе 1, а другой крепится на рычаге 6 с помощью оси 13. Конец 1 стопорного рычага 6 отстоит от конца 15 сигнального рычага 3 на расстояние, равное шагу кареток t, а рабочая поверхность 4 сигнального рычага 3 выполнена длиннее рабочей пот верхности 7 стопорного рычага 6 не менее, чем на половину ширины кронштейна 8 каретки 9- Сигнальный рычаг 3 в нейтральном положении удерживается пластинчатой пружиной 16, а в застопоренном - упором 17Ловитель работает следующим образом.
При набегании кронштейна 8 каретки 9 на сигнальный рычаг 3 (фиг. 2) последний отклоняется по направлению движения. Благодаря тому, что расстояние между концами 1 и 15 рабочих поверхностей 1 л k рычагов 6 и 3 равно шагу кареток, а рабочая поверхность k сигнального рычага 3 длиннее рабочей поверхности 7 стопорного рычага 6, предыдущий кронштейн 8 каретки 9 подойдет к стопорному рычагу 6 только после того, как сигнальный рычаг 3 будет полностью повернут последующей кареткой.
При повороте сигнального рычага 3 тяга 10 поворачивает стопорный рычаг 6, при этом его рабочая поверхность поднимается и пропускает под собой каретку 9. После Нрохода каретки под рабочей поверхностью k сигнального рычага 3 система рычагов возвращается в нейтральное положение (фиг. 1). В случае обрыва тяговой цепи (фиг. 3)
каретки 9 набегают друг на друга и шаг t между ними уменьшается, поэтому при подходе каретки 9 к стопорному рычагу 6 последний не будет повернут в рабочее положение, кронштейн 8 каретки 9 набежит на рычаг 6 и под действием собственной массы и усилия тяговой цепи повернет его до встречи упора 17 сигнального рычага 3 с монорел сом 1, планка 11 нажимает на конечный выключатель 12, который отключает привод подвесного конвейера (на фи.гурах не показан). После устранения обрыва цепи отсоединяют стопорный рычаг 6 от тяги 10 по оси 13, поворачивают стопорный рычаг 6 в направлении движения кареток на , соединяют осью 13 с тягой 10 и ловитель готов к работе.
Преимуществом ловителя является высокая надежность срабатывания и простота конструкции.
. Формула изобретения
Ловитель кареток на спуске подвесных конвейеров, включающий взаимодействующие рабочими поверхностями с кронштейнами каретки стопорный и подпружиненный сигнальный рычаги, соединенные жесткой тягой, и конечный выключатель, отличающийся тем, что, с целью повышения надежности его работы, конец рабочей поверхности стопорного рычага расположен от конца рабочей поверхности сигнального на расстоянии, равном шагу кареток, причем рабочая поверхность сигнального рычага длиннее рабочей поверхности стопорного по крайней мере на половину ширины кронштейна каретки.
Источники информации, принятые во внимание при экспертизе
г. /
Фиг.2
