Изобретение относится к подъемно- транспортному машиностроению и может быть исг1о;|ьзовано для улавливания кареток на спуске подвесных конвейеров в случае f) б р ы в а т я г о во и це п и.
Цель изобретения - - расширение эксплуатационных возможностей путем использования на трасса.х с одиночными и траверсными каретками.
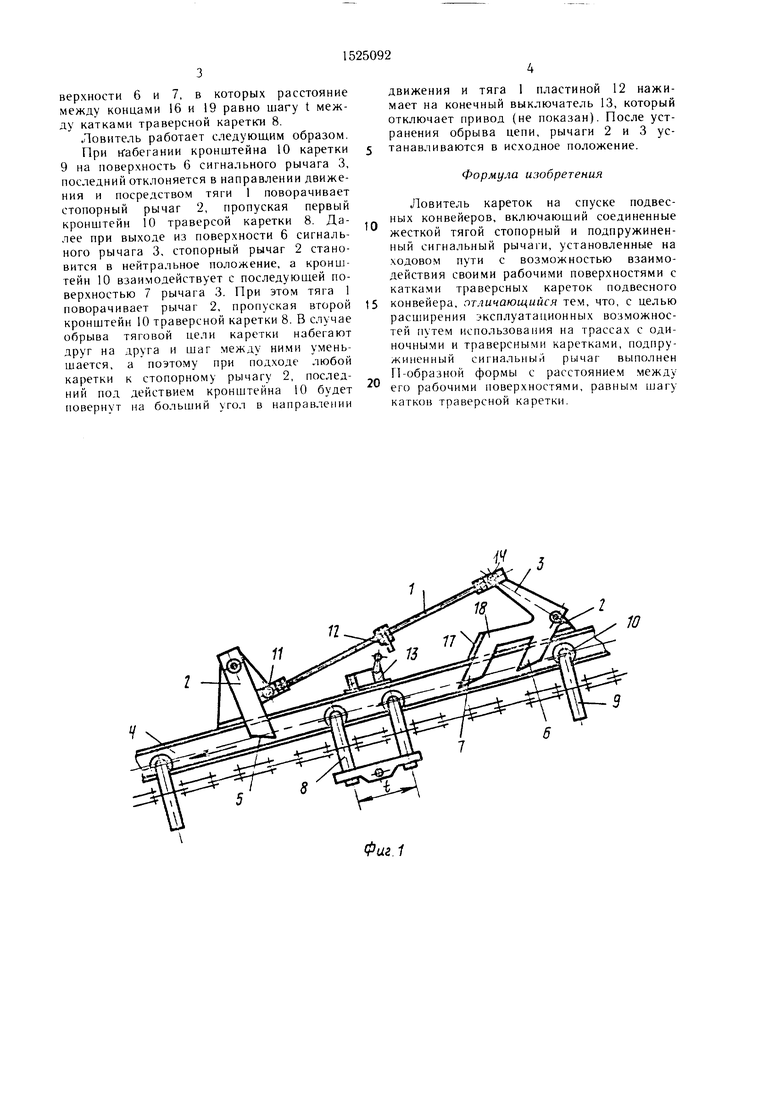
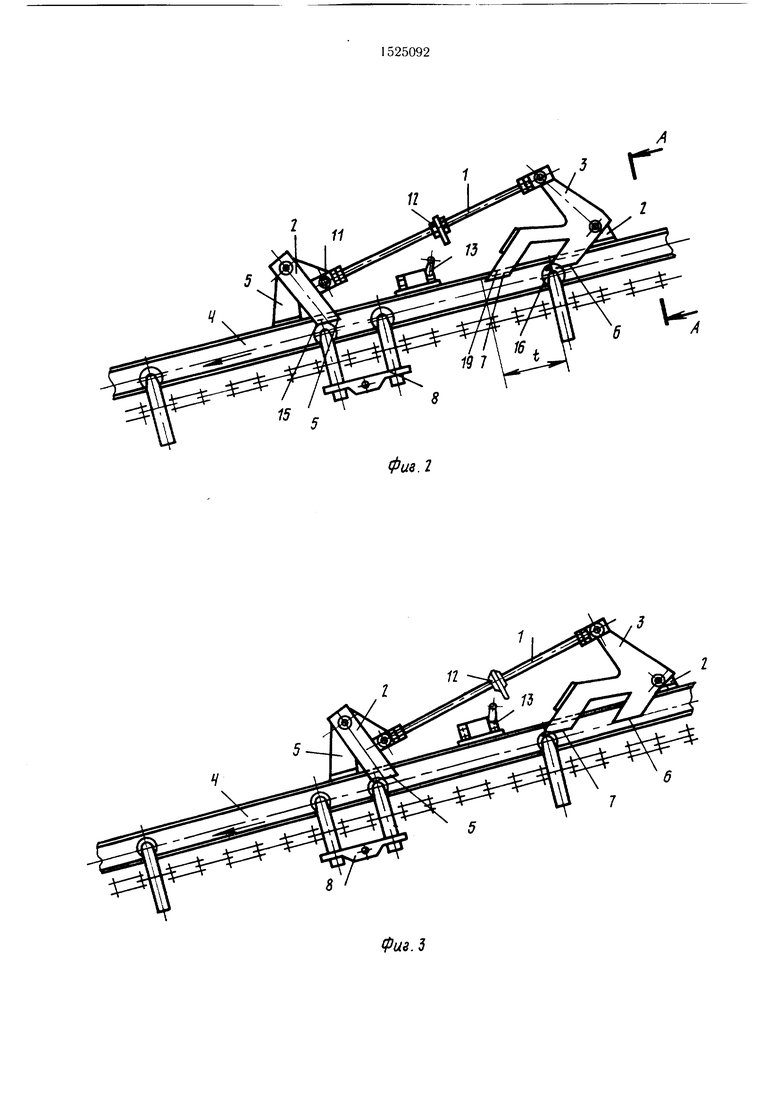
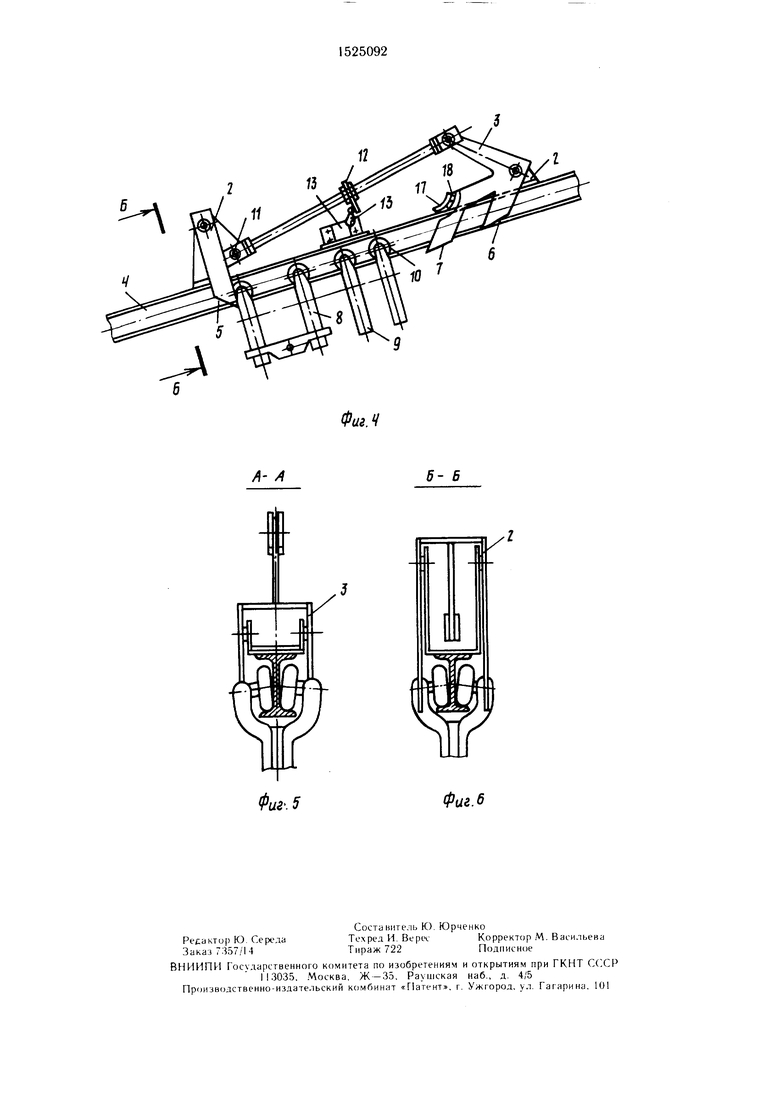
На фиг. 1 с.хематично показан предлагаемый ловитель; на фиг. 2 - то же, в рабочем положении; на фиг. 3 - то же, в рабочем положении; на фиг. 4 - положение ловителя при обрыве тягового органа; на фиг. 5 -- разрез А-А на фиг. 2; на фиг. 6 - разрез Б -Б на фиг. 4.
Ловитель кареток подвесных конвейеров включает соединенные жесткой тягой 1 стопорный 2 и подпружиненный сигнальный 3 рычаги, установленные на ходово.м пути 4 подвесного конвейера с возможностью взаимодействия своими рабочими поверхностями 5, 6 и 7 с катками траверсных кареток 8. Сигнальный рычаг 3 выполнен П-образной формы. Расстояние между рабочими поверхностями 6 и 7 сигнального рычага 3 равно шагу t между катками траверсной каретки 8. Каждая каретка 9 имеет кронштейны 10 с катками. Тяга 1 враш.ается на оси 1 1 и снабжена планкой 12 для взаимодействия на конечный выключатель 13. Другим концом тяга 1 соединена при помощи оси 14 с сигнальным рычагом 3. Конец 15 стопорного рычага 2 отстоит от конца 16 сигнального рычага 3 на расстояние, равное шагу кареток 9 конвейера, а рабочие поверхности 6 и 7 сигнального рычага 3 выполнены длиннее рабочей поверхности 4 стопорного рычага 2 не менее, чем на половину ширины кронштейна 10 каретки 9. Сигнальный рычаг 3 в нейтральном положении удерживается пластинчатой пружиной 17, а в застопоренном - упором 18.
В подвесных конвейерах одновременно применяются как траверсные 8, так и одиночные каретки 9. В связи с этим сигнальный рычаг 3 имеет две рабочие посд
60
СП
о (
N3
верхности 6 и 7, в которых расстояние между концами 16 и 19 равно шагу t между катками траверсной каретки 8.
Ловитель работает следующим образом.
При набегании кронштейна 10 каретки 9 на поверхность 6 сигнального рычага 3, последний отклоняется в направлении движения и посредством тяги 1 поворачивает стопорный рычаг 2, пропуская первый кронштейн 10 траверсой каретки 8. Далее при выходе из поверхности 6 сигнального рычага 3, стопорный рычаг 2 становится в нейтральное положение, а кронштейн 10 взаимодействует с последующей поверхностью 7 рычага 3. При этом тяга 1 поворачивает рычаг 2, пропуская второй кронштейн 10 траверсной каретки 8. В случае обрыва тяговой цели каретки набегают друг на друга и шаг между ними уменьшается, а поэтому при подходе любой каретки к стопорному рычагу 2, последний под действием кронштейна 10 будет повернут на больший угол в направлении
движения и тяга 1 пластиной 12 нажимает на конечный выключатель 13, который отключает привод (не показан). После устранения обрыва цепи, рычаги 2 и 3 устанавливаются в исходное положение.
Формула изобретения
Ловитель кареток на спуске подвесных конвейеров, включающий соединенные жесткой тягой стопорный и подпружиненный сигнальный рычаги, установленные на ходовом пути с возможностью взаимодействия своими рабочими поверхностями с катками траверсных кареток подвесного конвейера, отличающийся тем, что, с целью расширения эксплуатационных возможностей путем использования на трассах с одиночными и траверсными каретками, подпружиненный сигнальный рычаг выполнен П-образной формы с расстоянием между его рабочими поверхностями, равным шагу катков траверсной каретки.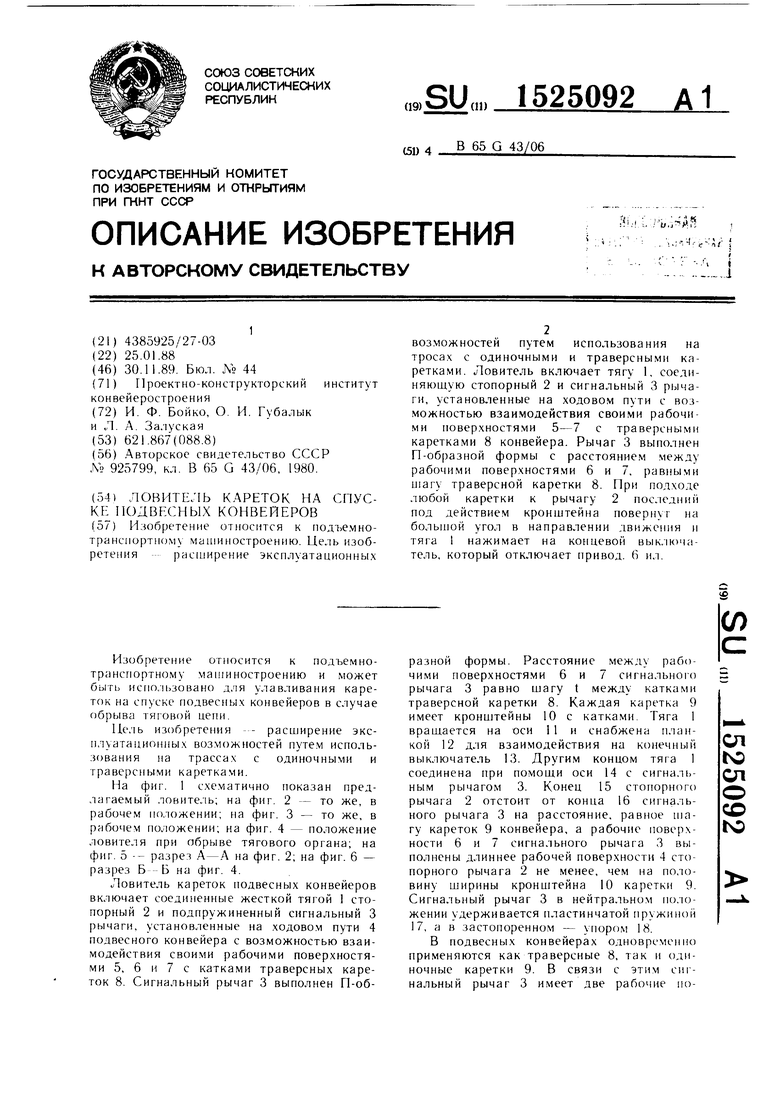
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель кареток на спуске подвесных конвейеров | 1980 |
|
SU925799A1 |
| Ловитель кареток на спуске подвесного конвейера | 1984 |
|
SU1217745A1 |
| Ловитель кареток на наклонных участках подвесного конвейера | 1983 |
|
SU1129149A1 |
| Ловитель кареток подвесного конвейера | 1981 |
|
SU1034966A1 |
| Ловитель кареток подвесного конвейерапРи ОбРыВЕ ТягОВОгО ОРгАНА | 1979 |
|
SU835903A1 |
| Устройство для улавливания кареток на спуске подвесного конвейера | 1983 |
|
SU1104077A1 |
| ЛОВИТЕЛЬ НА СПУСКЕ ПОДВЕСНЫХ КОНВЕЙЕРОВ | 1971 |
|
SU423718A1 |
| Автоматизированная поточная линия для изготовления сварных конструкций | 1991 |
|
SU1784430A1 |
| Камера для окраски крупногабаритных изделий | 1988 |
|
SU1549609A1 |
| Ловитель для грузовых тележек подвесного толкающего конвейера | 1973 |
|
SU471257A1 |
Изобретение относится к подъемно-транспортному машиностроению. Цель изобретения - расширение эксплуатационных возможностей путем использования на троссах с одиночными и траверсными каретками. Ловитель включает тягу 1, соединяющую стопорный 2 и сигнальный 3 рычаги, установленные на ходовом пути с возможностью взаимодействия своими рабочими поверхностями 5 - 7 с траверсными каретками 8 конвейера. Рычаг 3 выполнен П-образной формы с расстоянием между рабочими поверхностями 6 и 7, равными шагу траверсной каретки 8. При подходе любой каретки к рычагу 2 последний под действием кронштейна повернут на большой угол в направлении движения и тяга 1 нажимает на концевой выключатель, который отключает привод. 6 ил.
Фиг.1
12
8
Фив. 2
Физ.5
М
А- А
б- Б
Фиг. 6
| Ловитель кареток на спуске подвесных конвейеров | 1980 |
|
SU925799A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
