I
Изобретение относится к подъемно транспортнымсредствам и может найти применение в различных областях промышленности как для подъема и опускания грузов, так и для перемещения в горизонтальной плоскости.
Известен шаговый механизм перемещения, содержащий, по крайней-мере, три направляющих стойки, жестко установленные по углам основания, имеющего форму равнобедренного треугольника) и перемещающиеся между ними поддомкратную и наддомкрат.ную балки, управляемые посредством силового цилиндра, расположенного между ними, и поочередно взаимодействующие посредством стопорного устройства с пазами, выполненными в направляющих стойках с шагом, равным ходу силового цилиндра Г1.
Недостатками данного устройства являются отсутствие возможности регулирования плавности опускания балок под действием веса конструкции.
ЧТО приводит к толчкам при опускаНИИ, невозможность перемещения груз в горизонтальной плоскости.
Цель изобретения - повышение надежности в работе домкрата. „
Эта цель достигается тем, что в шаговом механизме перемещения, содержащем направляющие стойки и перемещающиеся между ними поддомкратную и наддомкратную балки, каждое стопорное устройство содержит втулку, охватывающую направляющую стойку и шарнирно соединенную с балкой, шарнирно укрепленный на втулке двуплечий рычаг, своими плечами взаимодействующий с пазами направляющих стоек, и шарнирно прикрепленный своими концами к втулке и двуплечему рычагу вспомогательный силовой цилиндр для управления упомянутым рычагом.
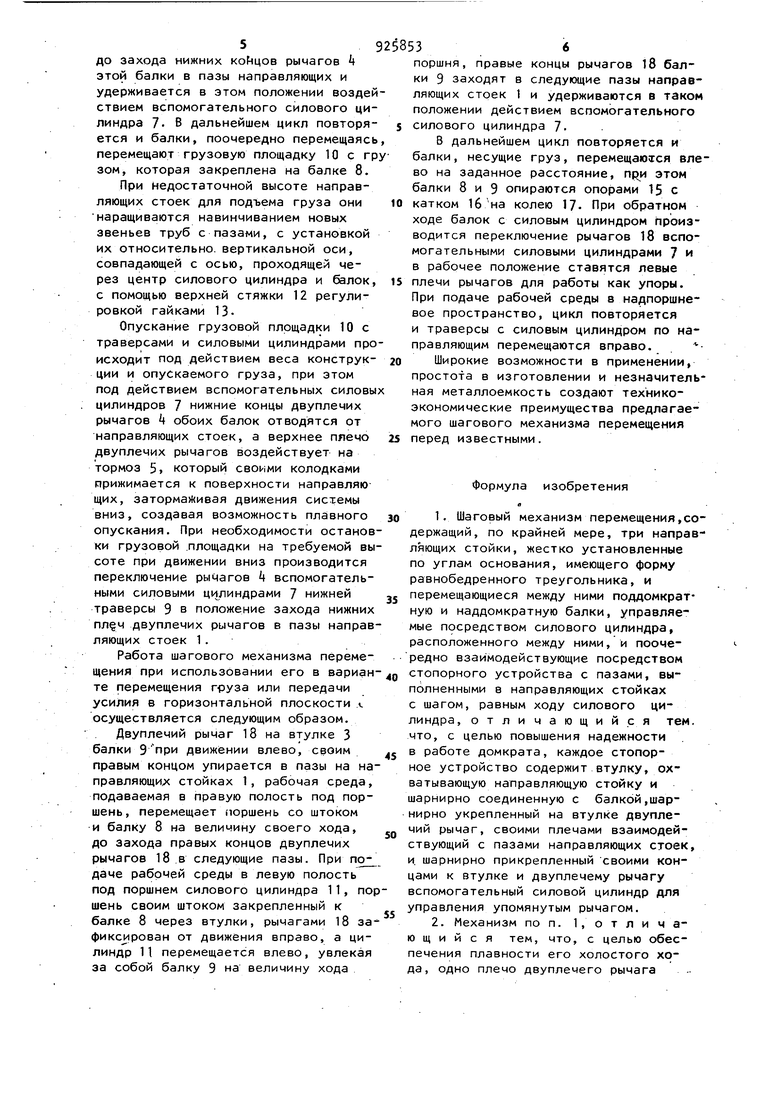
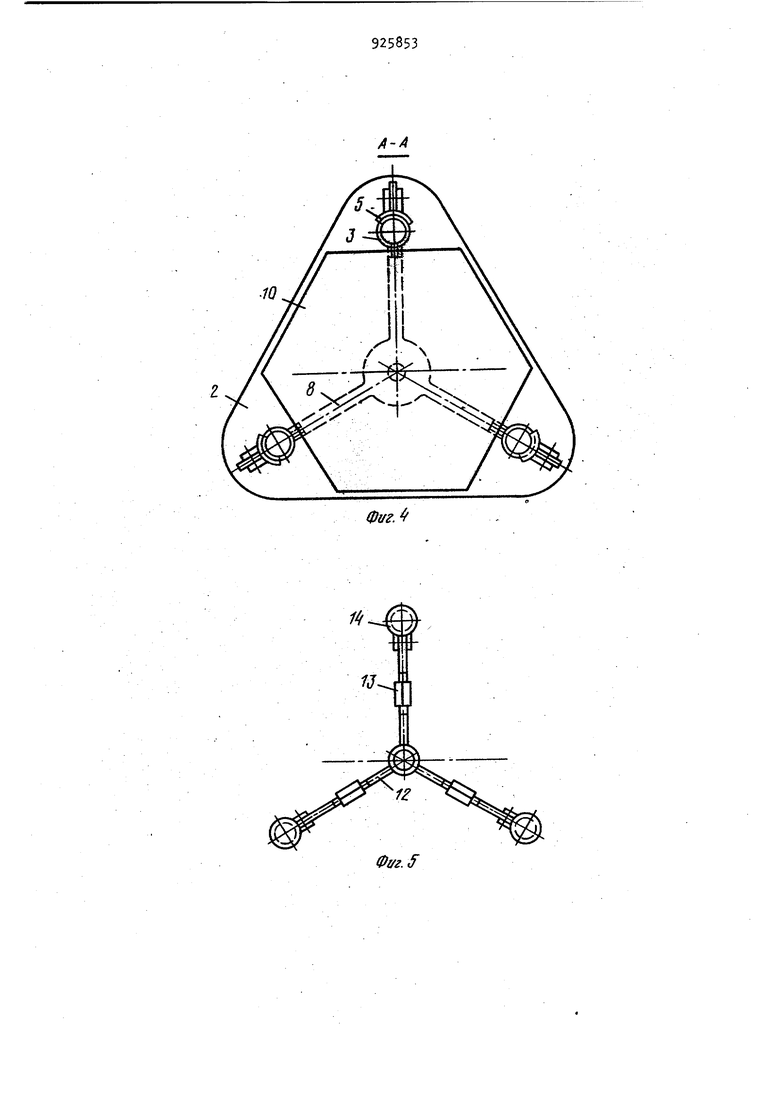
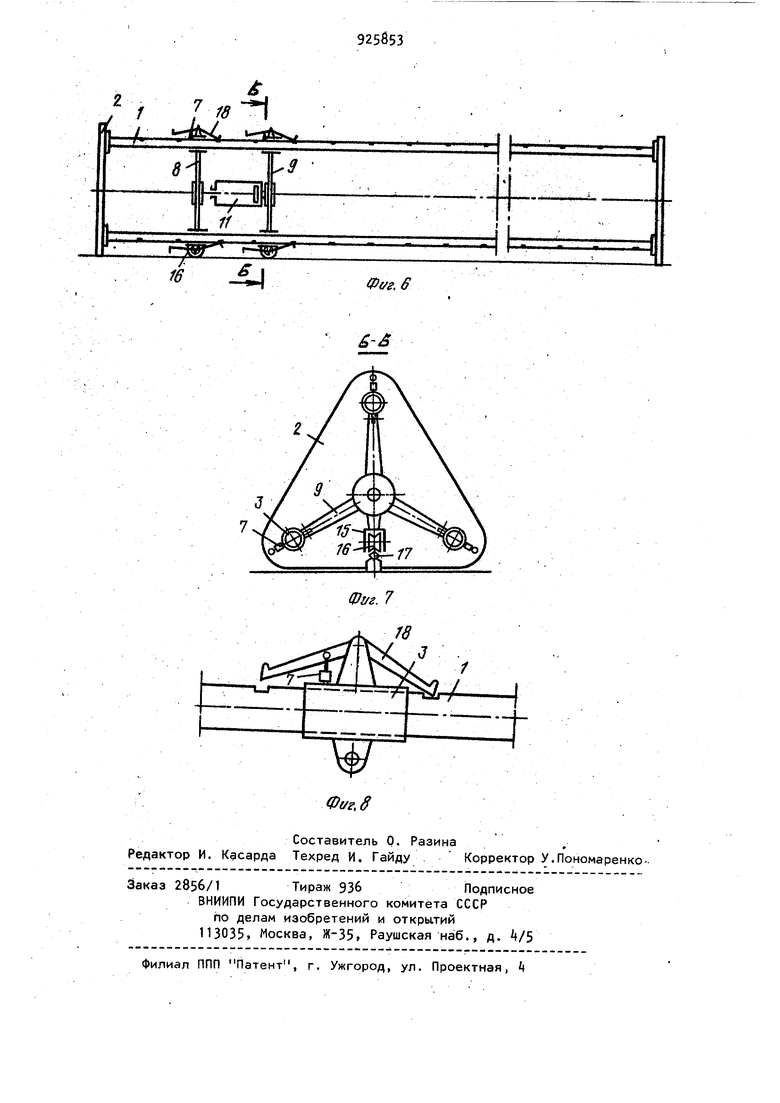
С целью обеспечения плавности холостого хода механизма, одно плечо двуплечего рычага снабжено фрикционным тормозом, шарнирно укрепленном 392 на нем и взаимодействующим со стойкой, при этом ширина тормоза превышает ширину паза, выполненного на стойке. Кроме того механизм снабжен стяжкой, содержащей стаканы, охватывающие стойки и по крайней мере тремя жестко соединенными между собой стержнями, каждый из которых снабжен регулировочной гайкой, а концы стерж- to неи шарнирно соединены со стаканами. С целью расширения эксплуатационных возможностей механизма,он снабже опорами с катками, укрепленными на балках. На фиг. 1 изображен механизм шаго вого перемещения, общий вид1 на фиг. 2 - положение двуплечего рычага и тормоза при подъеме балок $ на фиг. 3 положение двуплечено рычага и тормоза при опускании балок; на фиг. Ц - разрез А-А на фиг. 1, на фиг. 5 стяжка на фиг. 1, вид сверху, на фиг. 6 - втулка с двуплечим рычагом при варианте перемещения гру за в горизонтальной плоскости; на фиг. 7 - разрез Б-Б на фиг. 6; на фиг. 8 - двуплечий рычзг. Шаговый механизм перемещения соде жит направляющие стойки 1, выполненные, например, из свинчиваемых друг с другом труб, имеющих пазы с шагом, равным ходу поршня силового цилиндра основание 2 с расположенными на нем направляющими стойками в вершинах ра нобедренного треугольника, втулки 3 на кронштейне которых шарнирно закреплены двуплечие рычаги , нижний конец которых взаимодействует с ми в направляющих стойках при движеНИИ вверх, а верхний конец рычага ша с тормозом S, который нирно связан своей обоймой с колодками входит в вырез верхней части втулки 3 по направляющим 6, при этом колодки тормо за шире пазов в стойках, вспомогательный силовой цилиндр 7, закреплен ный своим корпусом к втулке, а шток его ша1 нирно соединен с верхним плечом рычага k, Наддомкратная балка 8, поддомкратная балка 9 своими концами, расположенными под углом 120 другк другу, шарнирно соединены с втулками 3 На наддомкратной,балке 8 закреплена площадка 10 для размещения транспортируемого груза. Силовой цилиндр 11 своим корпусом закреп лен к поддомкратной балке 3 а концо штока поршня - к балке 8, так, чтобы ось цилиндра совпадала с осью проходящей через центры балок. Шаговый механизм- перемещения содержит также верхнюю стяжку 12 со стержнями, расположенными под углом 120 друг к-, другу, имеющими соединение регулировочной гайкой 13 с правой и левой резьбой, концы стержней шарнирно соединены со стаканами 1 внутренними Диаметрами насаживаемых на концы направляющих стоек 1. При использовании шагового меха-., низма перемещения в варианте для перемещения грузов или передачи усилий 8 горизонтальной плоскости в целях устранения влияния самопрогиба при значительной длине направляющих и влияния веса силового цилиндра с балками на их прогиб, балки 8 и 9 имеют опоры 15 с катком 16, перемещающиеся по колее- 17. Рычаг 18, шарнирно закрепленный на вту.рке 3, имеет одинаковый изгиб плеч к направляющей балке и своими концами взаимодейству-. ет с пазами в направляющих стойках, вспомогательный силовой цилиндр 7 в зависимости от направления перемещаемого груза, переключает плечи рычага 18 в нужное положение.Направляющие стойки 1 своими концами закрепляются на основании 2, располагаясь в вершинах равнобедренного треугольника. Шаговый механизм перемещения работает следующим образом. Нижние концы двуплечих рычагов i под воздействием вспомогательных силовых цилиндров 7 заходят в пазы направляющих стоек 1, рабочая среда (газ или жидкость) подается в нижнюю подпоршневуТо полость силового цилиндра 11,. поршень со штоком поднимается и перемещает балку 8 на величину своего хода, при этом нижние концы двуплечих рычагов 4 этой балки входят в следующие пазы направляющих балок 1, расположенных по вертикали на величину хода поршня.Балка 9 Остается неподвижной, двуплечие рычаги СВ.ОИМИ нижними концами,упираясь-в пазы, фиксируют ее. При подаче рабочей среды в верхнюю надпоршневую полость цилиндра 11 поршень, конец штока которого прикреплен к балке 8, двуплечими рычагами втулок скольжения фиксируется .от движения вниз, а силовой цилиндр 11 поднимается, увлекая за со бой балку 9 на величину хода поршня до захода нижних концов рычагов k этой балки в пазы направляющих и удерживается в этом положении воздей ствием вспомогательного силового цилиндра В дальнейшем цикл повторяется и балки, поочередно перемещаясь перемещают грузовую площадку 10 с гр зом, которая закреплена на балке 8. При недостаточной высоте направляющих стоек для подъема груза они наращиваются навинчиванием новых звеньев труб с пазами, с установкой их относительно, вертикальной оси, совпадающей с осью, проходящей через центр силового цилиндра и балок, с помощью верхней стяжки 12 регулировкой гайками 13Опускание грузовой площадки 10 с траверсами и силовыми цилиндрами про исходит под действием веса конструкции и опускаемого груза, при этом под действием вспомогательных силовы цилиндров 7 нижние концы двуплечих рычагов k обоих балок отводятся от направляющих стоек, а верхнее плечо двуплечих рычагов воздействует на тормоз 5 который своими колодками прижимается к поверхности направляющих, затормаживая движения системы вниз, создавая возможность плавного опускания. При необходимости останов ки грузовой .площадки на требуемой вы соте при движении вниз производится переключение рычагов k вспомогательными силовыми цилиндрами 7 нижней траверсы 9 в положение захода нижних пл§ч двуплечих рычагов в пазы направ ляющих стоек 1. Работа шагового механизма пёремещения при использовании его в вариан те перемещения груза или передачи усилия в горизонтальной плоскости .1. осуществляется следующим образом. Двуплечий рычаг 18 на втулке 3 балки 9при движении влево, своим правым концом упирается в пазы на на правляющир стойках 1, рабочая среда, подаваемая в правую полость под поршень, перемещает поршень со штоком и балку 8 на величину своего хода, до захода правых концов двуплечих рычагов 18 .в следующие пазы. При ngдаче рабочей среды в левую полость под поршнем силового цилиндра 11, по шень своим штоком закрепленный к балке 8 через втулки, рычагами 18 за фиксирован от движения вправо, а цилиндр 11 перемещается влево, увлекая за собой балку 9 на величину хода 36 поршня, правые концы рычагов 18 балки 9 заходят в следующие пазы направляющих стоек 1 и удерживаются в таком положении действием вспомогательного силового цилиндра 7В дальнейшем цикл повторяется и балки, несущие груз, перемещаются влево на заданное расстояние, этом балки 8 и 9 опираются опорами 15 с катком 16 на колею 17- При обратном ходе балок с силовым цилиндром производится переключение рычагов 18 вспомогательными силовыми цилиндрами 7 и в рабочее положение ставятся левые плечи рычагов для работы как упоры. При подаче рабочей среды а надпоршневое пространство, цикл повторяется и траверсы с силовым цилиндром по направляющим перемещаются вправо. Широкие возможности в применении, простота в изготовлении и незначительная металлоемкость создают техникоэкономические преимущества предлагаемого шагового механизма перемещения перед известными. Формула изобретения 1. Шаговый механизм перемещения,содержащий, по крайней мере, три направляющих стойки, жестко установленные по углам основания, имеющего форму равнобедренного треугольника, и перемещающиеся между ними поддомкратную и наддомкратную балки, управляемые посредством силового цилиндра, расположенного между ними, и поочередно взаимодействующие посредством стопорного устройства с пазами, выполненными в направляющих стоиках с шагом, равным ходу силового цилиндра, отли чающийся тем. что, с целью повышения надежности в работе домкрата, каждое стопорное устройство содержит втулку, охватывающую направляющую стойку и шарнирно соединенную с балкой,шарнирно укрепленный на втулке двуплечий рычаг, своими плечами взаимодействующий с пазами направляющих стоек, и. шарнирно прикрепленный своими концами к втулке и двуплечему рычагу вспомогательный силовой цилиндр для управления упомянутым рычагом. 2. Механизм по п. 1, о т л и ч аю щ и и с я тем, что, с целью обеспечения плавности его холостого хода, одно плечо двуплечего рычага
снабжено фрикционным тормозом, шарнйрно укрепленным на нем и взаимодействующий со стойкой, при этом ширина ториоза превышает ширину паза, выполненного на стойке.
3. Механизм по п. 1, о т л и ч а ю щи и с я тем, что он снабжен стяжкой, содержащей стаканы, охватывающие стойки и по крайней мере тремя жестко соединенными между собой стержнями, каждый из которых снабжен -регулировочной гайкой, а концы стершнеи шарнирно соединены со стаканами.
t. Механизм по пп. 1 и 2, о т л им а.ю щ и и с я тем, что, с целью расширения его эксплуатационных возможностей, он снабжен опорами с катками, укрепленными на балках.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 28 02/11 , кл. В 66 F 1/02, 29.11.790f/2.Z
Фиг. /
0i/2.J
.10
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Шаговый подъемник | 1990 |
|
SU1776631A1 |
| Шаговый подъемник | 1981 |
|
SU994395A1 |
| Устройство для подъема жесткого крупногабаритного сооружения | 1987 |
|
SU1505890A1 |
| УСТРОЙСТВО ДЛЯ ВЫБОРКИ ПРОГИБА КОНСОЛИ СОБИРАЕМОГО ВНАВЕС ПРОЛЕТНОГО СТРОЕНИЯ МОСТА | 2006 |
|
RU2308563C1 |
| Шаговый подъемник | 1979 |
|
SU897709A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2260561C2 |
| Устройство для подъема крупногабарит-НыХ пОКРыТий | 1979 |
|
SU840017A1 |
| Шаговый подъемник | 1978 |
|
SU767013A1 |
| Устройство для сборки под сварку балок корабельного набора с полотнищем | 1980 |
|
SU933344A1 |
Фуг.
7 le
/ дЬ t-.ribs
t
«
фуе.б
