(54) ШАГОВЫЙ ПОДЪЕМНИК
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Шаговый подъемник | 1979 |
|
SU897709A1 |
| Устройство для подъема крупногабарит-НыХ пОКРыТий | 1979 |
|
SU840017A1 |
| Шаговый подъемник | 1990 |
|
SU1776631A1 |
| "Шаговый подъемник | 1977 |
|
SU652103A1 |
| Шаговый подъемник | 1978 |
|
SU767013A1 |
| Шаговый подъемник | 1988 |
|
SU1636329A1 |
| Шаговый подъемник | 1983 |
|
SU1222626A1 |
| Устройство для монтажа высотных сооружений | 1978 |
|
SU775283A1 |
| Шаговый подъемник | 1972 |
|
SU436794A1 |
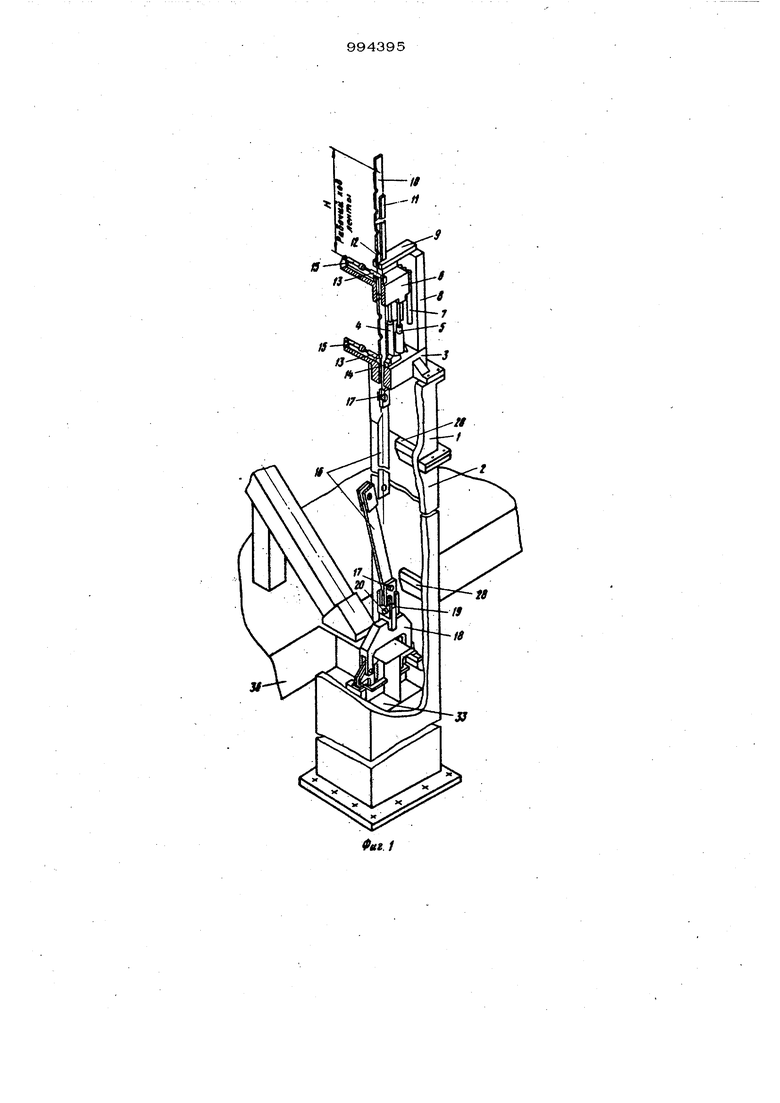
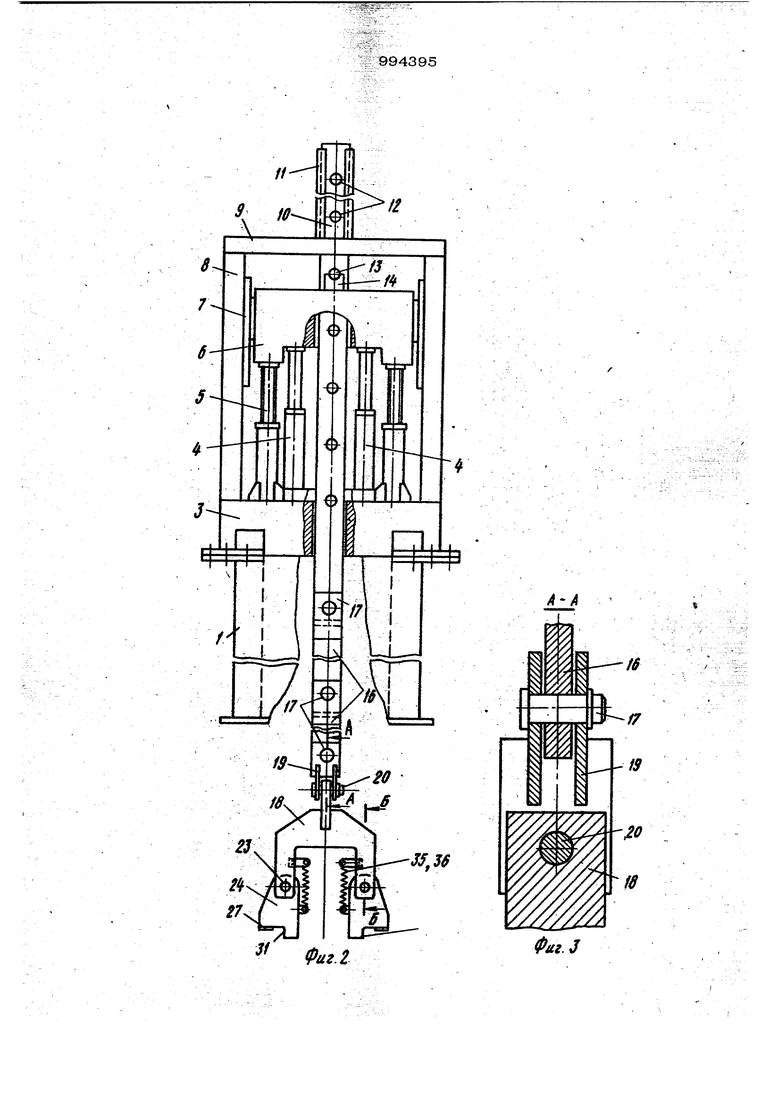
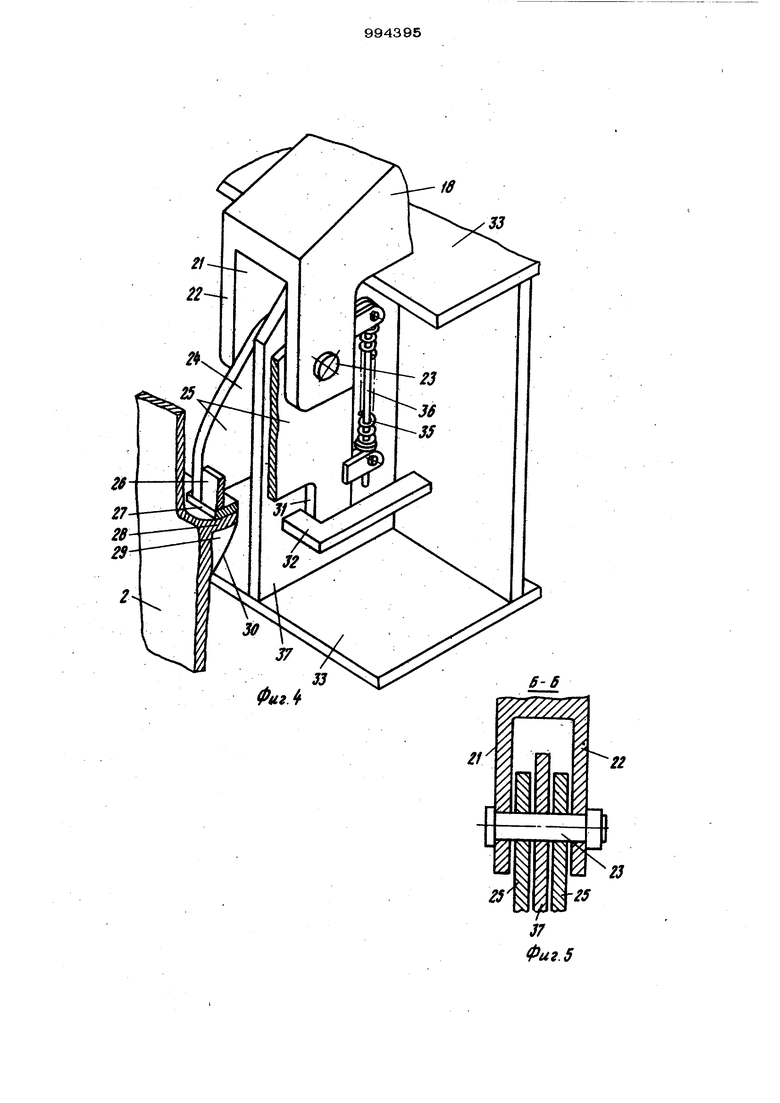
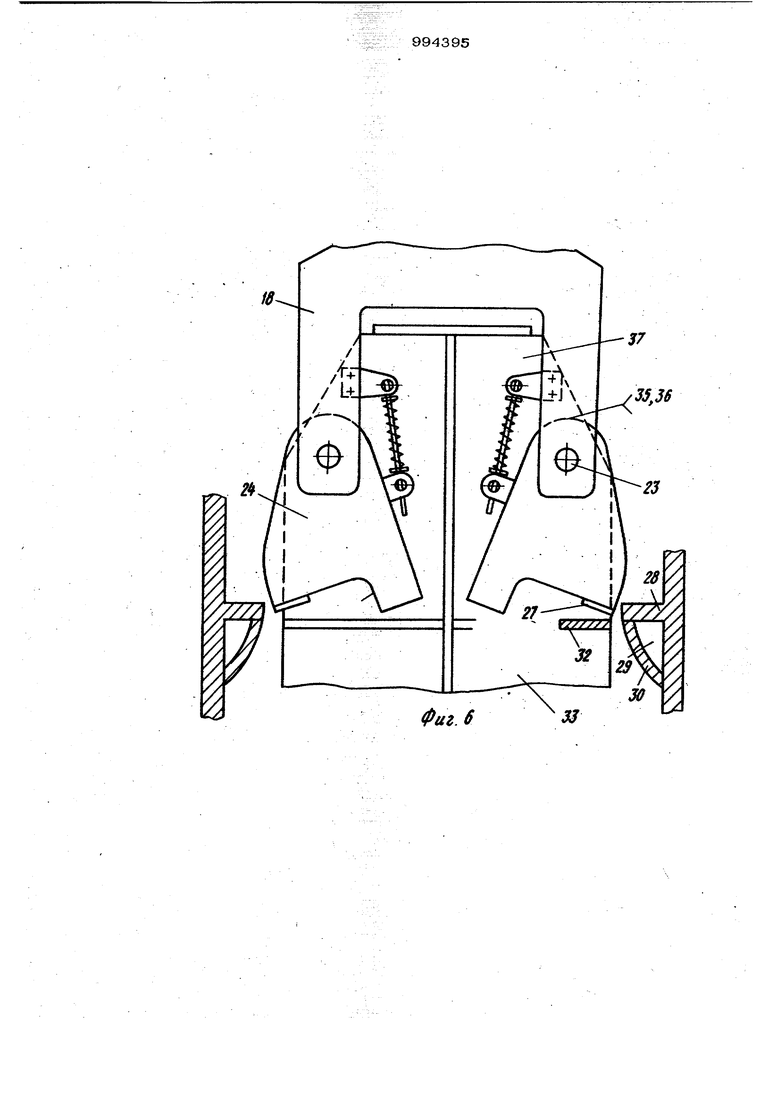

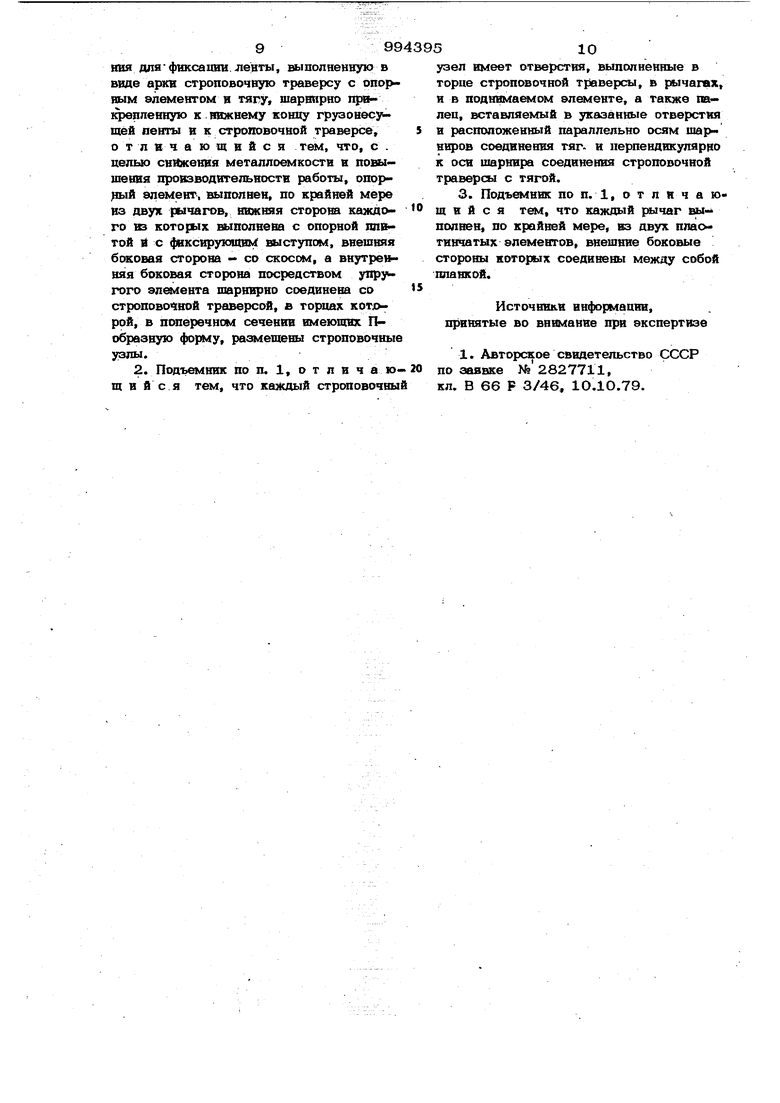
Изобретение относится к области гру зоподъемных механизмов, а именно, к шагошдм подъ никам, преимущественно для подъема тях еловесных крупногабарит ных покрытий. Известен шаговый подъемник, содёрка ший опору, установленную на ней поддсмкратную балку, домкраты, закрепленные №1 поддомкратной балке, вадд(«кратную белку, связанную со Ьтоками дсмкратов, П 3 онесу1цую ленту с отверстиями, щ способления для фиксапии ленты, выполненную в виде а1жи строповочнуЮ траве1 су с onopiOiiM элементом и тягу, шарнирНо прикрепленную к нижнему концу гру зонесущей ленты и к строповочной граBepce l3. Недостатком известного шагового подъемника является значительная его металлоемкость и сравнительно низкая производительность работы. Цель изобретения - снижение его металлоемкости и п6вЬ1шение производительности работы. Для достижения этой цели опорный элемент выполнен, по крайней мере, вз двух 1 1чагов, нижняя сторона каждого из которых выполнена с опорной шгатЬй и с фиксирующим выступом внешняя боковая сторюна - со скосом и внутрен няя боковая сторона посредством упругого элемента шарнефно соединена со строповочной траверсой, в торцах которой, в поперечном сечении имеющих П-образную форму, размешены строповочные узлы, Кроме того, каждьтй стропсюочный узел имеет отверстия, выполненные в торце стропрвочной траверсы, в рычагах и в поднима@«(ом элементе, а также палец, вставляемый в указанные отверстия и расположенный хшраплельно осям mai ниров соеди 1ения тяг и перпендикулярио к оси. шарнира соединения строповочной траверсы с тягой. Кроме того, каж/шй рычаг выполнен, по крайней мере, из двух пластинчатых элементов, внешние боковые стороны которых соединены между собой планкой. На .фиг. 1 показав шаговый подъемник с колонной и частью подннмаемого покры тия, упрощенная конструктнввая схема в аксонометрической проекпнв, общий ввд; на фиг. 2 - шагош 1й подьемкик, общий вид; на фиг. 3 .- сечение А-А на фиг. 2; на фиг. 4 - узел строповки с частью колонны и консольной частью ригеля поднимаемого покрытия, упрошенная ко1 структивная схема в аксонометрической проекции; на фиг. 5 - сечение Б-Б на фиг. 2 (условно покаэано ребро 37 торцевой части ригеля 33); на фиг. 6 балансирные рычаги с частью колонны и консольной частью ригеля в момент прохода между упорами колонны; на фиг. 7 поиъем покрытия с помощью четырех шаговых подъемников. Шаговый подьетиник (см. фиг. 1 и 2) содеркит опору 1, жестко закрепленную к колонне 2 возводимого соор1ужения. На опоре 1 установлена поддомкратная балка 3 с закрепленными на ней гидравлическими домкратами 4 и предохранительными устройствами 5. На штоки гндродомкратов 4 опирается и связана с ним наддомкратная балка 6, зафиксированная от горизонтальных сэл щений в направляющих 7 опорных стоек 8. Опорные стойки 8 жестко закреплены к поддомкратной балке 3 и соединены между собой в верхней части ригелем 9. Вертикально в прорезях балок поддс «сраТ ной 3, наддомкратной 6 и ригеля 9 расположена грузонесушая лента Ю. Верхняя обезгруженная часть грузонесущей ленты 10 пгаиещена в охватывающую ее направляющую 11, обеспечивающую ее устойчивое положение. Грузонесущая лёйт та 10 выполнена с отверстиями 12 для фиксации ее закладными пальцами 13. Ртверстия 12 выполнены с шагом, соответствующим шагу подъема штока гидрав лического домкрата 4. / На балках ваддомкратной 6 и поддомкратной 3 установлены полушшиндрические опорные седловины 14 для закладны пальцев 13 для попеременного крепления грузонесущей ленты 10 с помощью выполненных на них отверстий 12. Для ввода закладных пальцев 13 в отверстия 12 грузонесущей ленты 10 на балках наддомкратной 6 и поддсмкратной 3 установлены гкдродомкраты 15. Шаговый подъемник снабжен съемной тягой 16, состоящей из элементов, соединенных между собой прв помощи щарниров 17 (см. фиг. 3). Межцентровое расстояние между шарнирами 17 в каждом элементе тяги равно рабочему ходу (Н) грузонесущей ленты 10 (см. фиг. 1). Количество элементов тяг зависит от требуемой высоты подъема и, например, при высоте подъема до 4О м, когда рабочий ход грузонесущей ленты составляет 6 м, требуется еще шесть тяг 16 с межцентровым расстоянием между viapнирами 6 метров. Згементы тяги 16 шарнирно установлены между нижним концом грузонесущей ленты 10 и строповочной траверсой 18 с возможностью их последовательного демонтажа по одному элементу после каждого цикла подъема на рабочий ход (Н) грузонесущей ленты. Этементы тяги вы- . .полнены в виде цельносварных металлических листовых конструкций с отверствями на концах. Нижний элемент тяги 16 содержит переходное звено 19, посредством которого она соединена со строповочной траверсой 18. При этом ось нижнего шарн№ра 2О, соединяющего строповочную траверсу 18 с переходным звеном 19, раоположены перпендикулярно осям шарниров 17 (см. фиг. 3). Строповочная траверса 18 выполнена в виде открытой снизу арки и содержит два узла (см. ф«г. 4) стропоиси, выполненные в виде П-образных пазов-серьг 21 на нижних концах стоек 22 арки в ее плоскости со строповочными палышмишарнирами 23 (см. (Циг. 5), оси которых расположены параллельно осям шарниров 17 и перпендикулярно ОСЕ нижнего шарнира 20. Строповочная траверса 18 содержит опорный элемент, выполненный в виде двух верхних концами шарнирно подвешенных на строповочных пальцах-шарнирах 23 в пазах-серьгах 21 поворотных в вертикальной плоскости балансирных двусторонних рычагов 24. Каждый рычаг 24 имеет две стороны-грани 25, которые соединены между собой с помощью планки (ребра) 26. Торцевые поверхности сторонграней 25, начиная от ребра 26 до входа в пазы-серьгн 21, сжошены и закруглены и служат направляющими при подъеме для прохода рычагов 24 внутри колонны. На нижних концах балансирных рычагоъ 24 выполнены опорные плиты 27, взаимодействующие (оШфающиеся) в горизонтальной плоскости с упорами 28, выполненными внутри колонны 2. Под упорами 28 в колонне 2 установлены под. держиваюшие кронштейны 29 со скошенными и скругленными торцевыми поверхностями 30, которые одновременно-служат и направляющими при подъеме для прохода рычагов 24 внутри колоннь 2 Сем. фиг. 6), взаимодействуя с торцевым поверхностями его сторон-граней 25. Для фиксирования горизонтального положения поверхности onopjaix плит 27, т.е ограничения поворота балансирных рычагов 24 в вертикальной плоскости на стр повочнь1Х пальцах-шарнирах 23 под действием нагрузки в процессе опирания, на нижних концах {алчагов 24 выполнены выступы 31 для ограничения поворота, взаимодействующие с упорными планками 32,выполне нкыми в коне ольных ч астях ригелей 33 монтируемого блока покрытия 34. Балансирные рычаги 24 с помощью пружий 35 на пальцах 36 подпружинены относительно стоек 22 арки строповочной траве рсы 18 и выполнены с возможностью перемещения по вертикали внутри опорной колонны 2 с автоматическим пе|жодическим опиранием на ее упора 1 28 Строповка монтируемого блока покрытия 34 осуществляется за отверстия в двух опорных ребрах 37 (см. фиг. 5), выполненных в консольных частях ригеле 33,с помощью папьцев -шарниров 3... Подъем покрйтия 34 с помощью описанного uiaroBoro подъемника производи1 ся следующим образец. Подъем, например. Может производить ся с помощью четырех описанных подъем, НИКОВ 38 (см. фиг. 7). После монтажа к олойн 2 грузоподъемным меха низмом монтируют шаговые подъемники 38. Вначале устанавливают опоры 1 и жестко закрепляют их к колон1 м 2. Затем в сборе монтируют верхтою часть каждого подъемншса совместно с груэонесущей лентой 10, после чего монтируют тягу 16 и строповочную траверсу 18, предварительно сняв с нее балансирные рычаги 24.; В исходном положен1га грузонесущая лента 10 каждого подъемника 38 (см.; фиг. 7) посредстве закладного пальца 13, введенного с помощыо гидродомкрата 15-в ее крайнее верхнее отверстие 12, соединена с наддомкратной балкой 6 н удерживает .подвешенную к ней строповочвую траверсу 18. npk таком положении шаговых подъемников собирают покрытие 34 на временных опорах (на фиг. 7 не показано), при этом каждая консольная часть jrareля 33 устанавливается таким оброэом, чтобы ее опорные ребра 37 находились по середине пазов-серьг 21 арки стро. ПОБОЧНОЙ траверсы 18, а отверстия пазо&серьг 21 и опорных ребер 37 |ааходились на одной горизонтальной .Затем устанавливают балансирные рычаги 24 в пазах-серьгах 21 Так, чтобы их стороны-грани 25 охватывали опорные ребра 37, а отверстия каждого паза-серьги 21, опорного ребра 37 и рычага 24 находолись на йдной горизонтальной оси. После этого в эти отверстия вводят пальцы.шарниры 23, производя таким образом строповку поднимаемого покрытия 34 (см. фиг. 5), Для подъема покрытия вклюЧ(ают приводы гидродомкратов 4 каждого шагового подъ 1ника, при этся4 шток к аждого ги родомкрата, выдвигаясь, поднимает связанную с ним наддомкратную балку 6. Груз онесущая лента 1О совместно с тя-; гой 16, закреплвйная через свое отверотие 12 к полуцилиндрической опориой седловине 14 с помов&ю закатадвьгх liajt цев 13, поднимает на шаг штока гидродомкрата подвешенную к ним стрововочную траверсу 18 совместно с покрытием 34 В процессе подъема ваддомкратная банка 6 перемещается в направляющих 7 опор ных стоек 8, а бала исирные рычаги 24 строповочной траверсы 18 Перемешаются внутри опорной колонны 2 поднимаемого покрытия 34, при ётом их скошенные и скругленные Торцевые поверхности сторон-граней 25, поджатые пружинами 35, взаимодействуют (скользят) по внутренсгам поверхностям стенок коловн 2После подъема покрытия на шаг гру зонесущей ленты Ю, ва каждом шаговс подъемнике с п(Ж{ощыо гидродомк та 15 вводят закладной палец 13 в отверс тие ленты 10, опускают наддомкратную балку 6, передавая таким образом вертикальную нагрузку на каждую поддомкратную балку 3, выполняется операция перехвата лент 10. Затем закладной палец 13-каждого подъемника, скреш1як щий ленту 10 с наддомкратвой балкой 6, выводят с помощью гш1родомкрата 15 из отверстия 12 ленты lO и ваддомкратную балку 6 сшускают гидрод6мк1 таМи 4 в. нижнее положение ва величину шага левты 1О.После этого с помощыо закладное го пальца 13 аналогично опвсаинсяи(у выше закрешшют ленту 1О ш 1гддомкрЕ1Т иой балке 6. : Для снятая нагрузки с поддомкратной балки 3 наддомкратвую балку 6 припо/ 99 нимают вверх на 5... 10 мм, поспе чего закладной палеи 13 выводят из отверстия 12 пенты Ю. Затем включают привод гидродомкратов 4 ва подъем и выполняют очередной подъем еще на один шаг. В такой последовательности выполняется подъем на рабочий ход (Н) грузовесужей ленты 10. Перед окончанием подъема на рабочий ход грузонесущей ленты 10 балавсирные рычаги 24 каждого подъемника проходят между упорами 28 колонны 2, при этом скошенные и скругленные торцевые поверхности их сторо№-граней 25, поджатые пружиной 35, взаимодействуют (скользят) по скругленным то1 цевым поверхностям ЗО поддерживающих кронштейнов 29 (см. фиг. 6) и после окончания подъема становятся своими опорными плитами 27 над упорами 28 колонны 2 с некоторым зазором. Затем опускают блок покуытия 34 совместно со строПовочноЙ траверсой 18 И рычагами 24 на величину этого зазора опирая таким образом балансирные рычаг 24 на упоры 28 в колоннах 2 (см. фиг. Таким образом производится передача всех вертикальных и горизонтальных на- грузсж на колонны поднимаемого покры1О и тяги 16 тия, а груаонесущие ленты обезгруживаются. После этого на каждом шагов(%4 под-ы емвике отсоединяют шарниры 17 нижнего элемента тяги 16 и демонтируют ее. Затем опускают грузонесущую ленту 10 с помощью гидродомкратов 4 на ее рабочий ход (Н), соединяют нижний элемент тяги 16 шарниром 17 со строповочной траверсой 18 и производят очередной подъем покрытия на.рабочий ход грузонесушей ленты. В такой последовательности выполняется необходимое количество описаннь1х выше циклов подъема на рабочий ход грузовесущей левты (Н) для подъема блока покрытия 34 на требуемую величину. Вследствие допусков на изготовление колонн 2, ригелей 33 и самого покрытия 34, а также погрешностей установки самих шаговых подъемников 38, точки подвеса (соединения) верхних шарниров 17 грузонесущих лент 10 с тягами 16 (в плане эти точки должны в идеальном случае быть вершинами прямоугольника) могут не совпадать с точками подвеса (соединения) вижних шарниров 17 тяг 1 с переходным звеном 19. В таких случа за счет шарниров 17 и 20 происходит 58 незначительное отклонение (в пределах допустимых расчетных величин) тяг 16 и переходных звеньев 19 от вертикали, при этом в процессе подъема блока величины этих отклонений изменяются. Отклонения тяг 16 и звеньев 19 могут происходить и под действием доцустимых рабочих ветровых нагрузок на блок. После окончания подъема блока покрытия на требуемую величину, несколько превышающую его проектную отметку, на последний верхний р$щ упоров 28 колонн 2 устанавливают поперечнъш проектные балки (на фиг. 7 не показаны) и опускают на них блок покрытия, при этом основания консольных частей ригелей 33 свободны и поперечные балки сразу устанавливаются по середине колонн в свои проектные положения. Технико-эконсмические преимущества изобретения по сравнению с базовым обг ектом следующие. Bcv-первых, уменьшается металлоемкость опорных колонн за счет уменьшения ширины вследствие уменьшения дл&ны строповочной траверсы. Во-вторых, за счет упрощения конструктивной схемы траверсы в два раза уменьшается металлоемкость. В-третьих, уменьшается трудоёмкость и упрощается демонтаж строповочной траверсы после поиъ&ла блока покрытия в проектное положение, а также уменьшается трудоемкость установки поперечных балок при закреплении блока в проектвом положении. В-четвертых, за счет усовершенствования конструкции опорно-поворотной балки - приближения точки приложения сил на упоры колонн от их стенок, повышается надежность колонн в процессе монтажа, уменьшается их металлоемкость. В-пятых, за счет усовершенствования коВструкшш опорно-поворотной балкн сшсращается тяжелый ручной труд в труднодоступных условиях на высоте по развороту опо рно-поворотной балки. Формула изобретения 1. Шаговый подъемник, преимущественно для подъема тяжеловесных крупногабаритных покрытий, содержащий опору, установленную на ней поддомкратвуСЬ балку, домкраты, закрепленные ва поддомкратвой балке, ваддамкратвую балку, сзязанную со штоками домкратов, грузон&сущую ленту с отверстиями, приспособле999нвя для- фиксации, ленты, выполненную в виде арки строповочвую траверсу с опорным элементом в тягу, шарнирно прв1феплекную к . нижнему концу грузонесушёй пенты и к строповочной траверсе, о т л и ч а ю щ и и с и тем, что, с . целью снижения металлоемкости и повышения производительности работы, опор 1Й алемент, выполнен, по крайней мере из двух рычагов, нижняя сторона каждого КЗ которых выполнена с опорной ппвтой lA с фиксируюищу выступом, внешняя боковая сторона - со скосом, а внутренняя боковая сторона посредством упруь. гого элемента шаршфно соединена со строповочной траверсой, в торцах , в поперечном сечении имеющих Побразную форму, размешены строповочные узлы. 2. Подъемник по п. 1, о т л и ч а ю ш и и с я тем, что каждый стрсяювочны 5 узел имеет отверстия, выполненньге в торце строповочной траверсы, в рычагах, н в поднимаемом элементе, а также палец, вставляемый в указанные отверстия и расположенный параллельно осям шарниров соединения тяг- и перпендикулярно к оси шарнира соединения строповочной траверсы с тягой. 3. Подъемннк по п. 1, о т л и ч а ю« щ и и с я тем, что каждый рычаг выполнен, по крайней мере, из двух пластинчатых элементов, внешние боковые стороны которых соединены между собой планкой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельства СССР по заявке №2827711, кл. В 66 F 3/46, 10.1О.79.
// /ffШ
I.
-/
лг.
-(г / Фиг. 6
