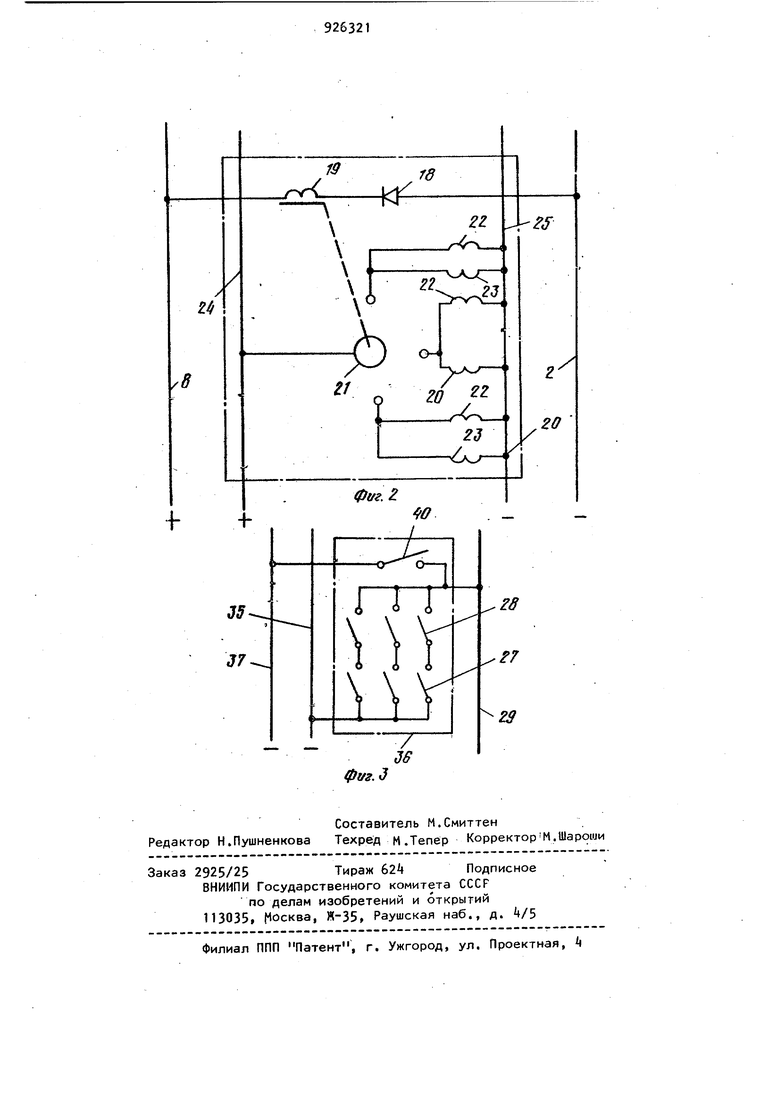
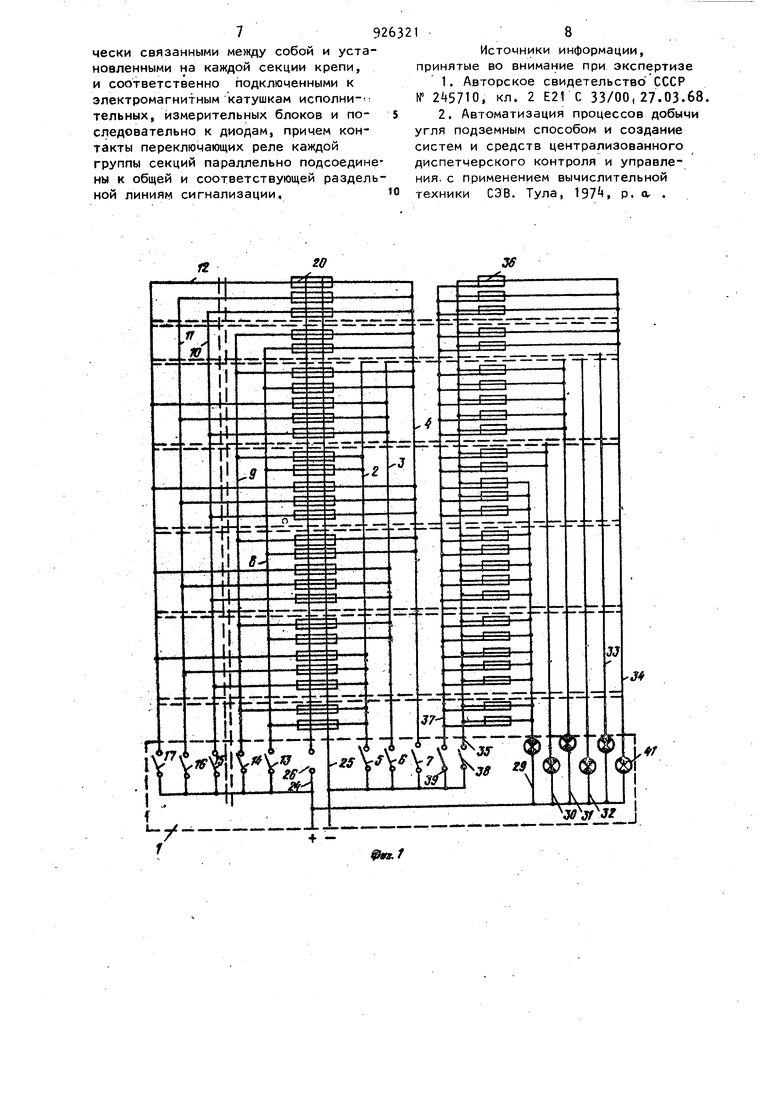
Изобретение относится к горной пр мышленности, а именно к средствам централизованного диспетчерского кон роля и управления процессами механизированной подземной выемки угля, в частности к системам управления крепью при струговой выейке угля. Известна система автоматического управления гидрофицированной крепью, содержащая датчики положения секций, электрогидроклапаны, распределитель импульсов, дешифратор, под.ключенуый через переключатели к вход ному устройству, устройство индикации, счетчики, логические схемы и другие элементы 1J. Однако эта система имеет сложную аппаратуру управления и большое ко 1ичество соединительных проводов, чт снижает надежность работы системы. Известна также система автоматического управления гидрофицированной крепью, содержащая управляющую вычислительную машину, параллельно соединенные проводнь1е матрицы с включенными в их узлы диодами по числу групп одновременно управляемых секций крепи, электромагнитные катушки исполнительных и измерительных блоков, линии связи и сигнализации 2. Однако известная система содержит относительно большое количество диодов и линий связи чго снижает ее надежность. Цель изобретения - повышение надежности системы за счет сокращения количества линий связи. Поставленная цель достигается тем, что система снабжена переключателями и переключающими реле, кинематически связанными между собой и установленными на каждой, секции крепи, и которые соответственно подключены к электромагнитным катушкам исполнительных и измерительных блоков и последовательно с диодами в узлы проводных матриц, причем контакты п реключающих реле каждой группы секций параллельно подсоединены к общей и соответствующей раздельной линиям сигнализации. На фиг.1 изображена электрическая схема системы автоматического управления крепью, например при струговой выемке угля; на Электрическая схема узла проводной м рицы;. на фиг.З - электрическая схема узла подключения замыкающих контакто измерительных блоков. Система автоматического управления крепью при струговой выемке угл содержит управляющую вычислительную машину 1, многожильные управляющие кабели и параллельно соединенные проводные матрицы по числу групп од новременно управляемых секций. Линии св14зи - жилы 2-k управляющих кабелей (по числу подгрупп секций в группах секций / подключены че рез замыкающие контакты 5-7 машины например, к минусу источника напр жения. Линии связи - жилы 8-12 /по числу секций в каждой подгруппе сек ций I подключены через замыкающие ко такты машины 1 к противополож ному полюсу источника напряжения. Проводные матрицы образованы путем соединения в пределах группы секций (наприк)ер, в пределах каждых очередных 30 секций из 180 секций крепи) каждой жилы 2- одной полярности поочередно с каждой жилой 812 противоположной полярности через диоды 18 (фиг.2 и обмотки переключающих реле 19t Размещенные в узлах 20 матриц (фиг.1 ). С сердечником (фиг.2 ) каждого реле 19 кинематичес ки связан переключатель 21. Каедый переключатель 21 имеет столько по11ожений, сколько имеется пар параллельно соединенных катушек 22 и 23 исполнительных и измерительных блоков, установленных на каждой секции, и одно положение соответствующее состоянию, когда ни одна из пар катушек 22 и 23 не подключена к источнику напряжения. Все пары параллельно соединенных катушек 22 и 23 через переключ тель 2.1 параллельно подключены к отдельной линии питания, выполненной из проводов и 25 с замыкающим контактом 26. Исполнительные блоки предназначены для управления механизмами пр снятии распора. передвижке секци распоре секций, передвижкеконвейе 14 ра и выполнечии других операций по эксплуатации крепи. В качестве таких блоков используют электрогидравлические распределители. Измерительными блоками могут быть, например герконовые реле, контакты 27 (фиг.З) которых включены последовательно с датчиками 28 передвижения секций в разделенные измерительные цепи линии сигнализации с разделенными проводами 293 (по числу групп секцийj и общим проводам 35 (узел Зб). Параллельно с проводом 35 проложен дополнительный общий провод сигнализации 37. Провода 35 и 37 подсоединены к источнику напряжения через замыкающие контакты 38 и 39.Между жилой 37 и жилами 29-3 (в узлах 36) в пределах каждой группы секций параллельно подсоединены замыкающие контакты ЦО (фиг.З), связанные также с сердечником реле 19. Для сигнализации в разделенные измерительные цепи включены сигнальные лампочки 1 (фиг.1}, установленные на управляющей вычислительной машине 1. Система работает следующим образом. В исходном положении системы замыкающие контакты 5,6,7,13,1, 15,16, 17,26,38,39 разомкнуты и система обесточена, Переключатели 21 находятся в исходном положении. Все контакты 27,28, 40 разомкнуты. В этом положении все секции крепи расперты. При замыкании контактов и 39 срабатывают реле 19i подключенные между жилами 2 и 3 в каждой из проводных матриц и управляющие переключателяг и 21 первых секций (по порядку в каждой первой |по порядку) подгруппе секций. Сердечники реле 19 воздействуют на переключатели 21 указанных секций в каждой группе секций и устанавливают их в первое положение, подключая первую пару параллельно соединенных катушек 22 и 23 исполнительных блоков, например, управля,ющих разгрузкой секций, и измерительных блоков, соответственно, реистрирующих разгрузку секции, к отдельной линии пит,ания (жилы 24 и 25) Одновременно сердечники реЛе 19 воздействуют на контакты tO и замыкают разделенные цепи линии сигнализации, в результате чего зажигаются лампочки 1i После того, как во всех цепях зажгутся сигнальные лампоч5ки Ц (что свидетельствует о срабат вании реле 19 а следовательно и о переключении переключателей 21 всех одновременно управляемых секций кре пи, т.е. всех первых секций в каждой первой подгруппе секций ) машина 1 размыкает контакты 13 и 39 и замыкает контакты 38 и 26. При этом катушки 22 и 23, уже подключенные к линии питания, подключаются к йс точникам напряжения. Измерительные блоки (регистрирующие разгрузку сек ций ) всех одновременно управляемых секций срабатывают и замыкают контакты 27 разделенных измерительных цепей линии сигнализации (содержащие контакты 28 датчики передвижения секции при первой операции, т.е датчики разгрузки секций). Исполнительные блоки с катушками 22 выполняют первую операцию, например снятие распора.По истечение времени завершения первой операции на каждой из одновременно управляемых сек ций срабатывает дачтик снятия распо ра и замыкает контакты 28. В разделенных измерительных цепях линии сигнализации зажигаются си|- нальные лампочки 1. Зажигание лампочек во всех разделенных цепях сви детельствует о завершении первой on рации на всех одновременно управляе мых первых секциях в каждой первой подгруппе секций крепи. После этого машина 1 размыкает контакты 38 и 26 и путем возбуждения тех же самых подключенных между жилами 2 и 8 реле 1Э устанавливает .переключатели 2 первых секций в каждой подгруппе се ций во второе положение и соединяет путем замыкания контакта 26 вторую тару катушек 22 и 23 с источником напряжения.Вторая пара катушек 22 и 23 обеспечивает, например, управление выдвижением секции на забой и контроль выдвижения секции. Принцип рабо;ы системы при выполнении второй операции ана-логичен работе при выполнении i первой операции. Дальнейшая ра- бота системы отличается от описанного цикла по выполнению первой операции только тем, что в соот ветствии с изменением номера операции (в порядке их последовательное ти1, номера секции в подгруппе и номера, группы секции (по порядку ) соответственно изменяют замыкающие контакты, на которые воздействует 21 замыкает или размыкает) машина 1. Выбор подгруппь секций производится путем замыкания соответствующего контакта 5,6 .или 7. Выбор порядкового номера секции в подгруппе секций осуществляется за счет замыкания соответствующего контакта 13-17 или 18. Выбор операции по передвижению секции осуществляется перестановкой переключателе 21 в соответствующее положение, путем импульсного возбуждения переключающих реле 19. При этом подключение катушек 22 и 23 к источнику напряжения .производится толь.ко после соответствующей установки всех переключателей 21 в одинаковое положение, контроль правильности установки переключателей и контроль выпол.нения операций осуществляется по зажиганию лампочек 41 в разделенных измерительных цепях линии сигнализации. Использование системы автоматического управления крепью позволяет сократить количество линий связи примерно в два раза (при одинаковом количестве групп, секций в групрах и исполнительных блоков на каждой секции и уменьшить количества диодов, примерно, в три и более раз (в зависимости от количества исполнительных блоков и измерительных блоков на каждой секции). Все это повышает надежность системы. Кроме того, в предлагаемой системе количество исполнительных и измерительных блоков на каждой секции может быть значительно увеличено без увеличения количества жил кабелей /соединительных проводов J и диодов. Формула изобретения Система автоматического управения гидрофицированной крепью, содеращая управляющую вычислительною маину, параллельно соединенные проводые матрицы с включенными в их узлы иодами по числу групп одновременно правляемых секций крепи, электромагитные катушки исполнительных и измеительных блоков, линии связи и сигнаизации, отличающаяся тем. то, с целью повышения надежности сисемы за счет сокращения количества лиий связи, она снабжена переключатеями и переключающими реле, кинемати792632
чески связанными между собой и установленными на каждой секции крепи, и соответственно подключенными к электромагнитным катушкам исполни- : тельных, измерительных блоков и по- s следовательно к диодам, причем контакты переключающих реле каждой группы секций параллельно подсоедине мы к общей и соответствующей раздельной линиям сигнализации,О
18
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельствоСССР N , кл. 2 Е2ГС 33/00,27.03.68
2. Автоматизация процессов добычи угля подземным способом и создание систем и средств централизованного диспетчерского контроля и управления, с применением вычислительной техники СЭВ. Тула, IS, р. а .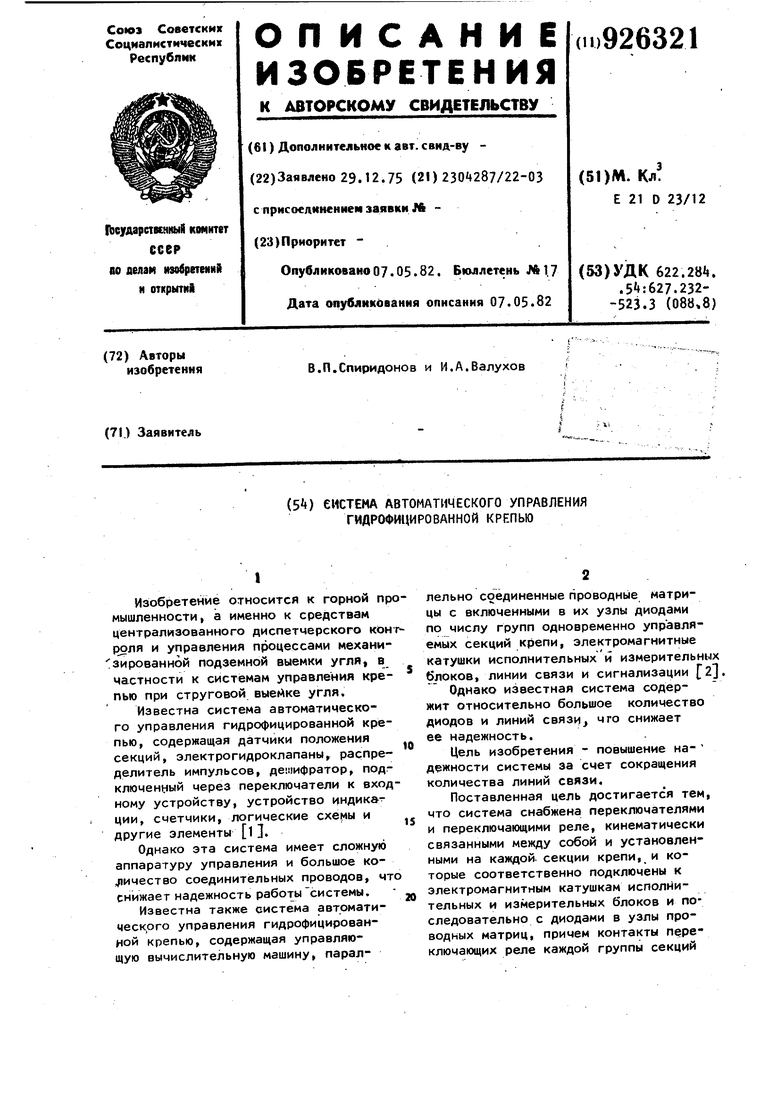
| название | год | авторы | номер документа |
|---|---|---|---|
| Система звуковой сигнализации для горных машин | 1982 |
|
SU1198226A1 |
| Многоканальная телеизмерительная система | 1990 |
|
SU1783562A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2042115C1 |
| Устройство для управления реверсивным электроприводом | 1987 |
|
SU1515307A1 |
| Устройство для защитного отключения электроустановки с зануляющей магистралью, подключенной к защитной магистрали распредпункта | 1980 |
|
SU982135A1 |
| ТОПЛИВОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2081398C1 |
| Устройство опроса объектов измерения и сигнализации | 1988 |
|
SU1536419A1 |
| Устройство для дистанционного управления совокупностью рассредоточенных объектов | 1971 |
|
SU444234A1 |
| СЕТЬ НАРУЖНОГО ОСВЕЩЕНИЯ | 1988 |
|
RU2025911C1 |
| Устройство дистанционного управления забойным электрооборудованием | 1974 |
|
SU744135A1 |