(5) ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Оптический датчик перемещений | 1980 |
|
SU998856A2 |
| Устройство для измерений перемещений объекта | 1988 |
|
SU1654651A1 |
| Оптический датчик перемещений объекта | 1977 |
|
SU619789A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ПРИ ДИАГНОСТИКЕ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2210068C1 |
| Преобразователь перемещения в код | 1987 |
|
SU1510083A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЕ-КОД | 2003 |
|
RU2248093C1 |
| Фотоэлектрический преобразователь перемещения в код | 1983 |
|
SU1141576A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПАРЫ МЕТРОЛОГИЧЕСКИХ ГОЛОГРАФИЧЕСКИХ ДИФРАКЦИОННЫХ РЕШЕТОК ТУРУХАНО | 1988 |
|
SU1814406A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В ПОСЛЕДОВАТЕЛЬНОСТЬ ИМПУЛЬСОВ | 1991 |
|
RU2025043C1 |
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
, Изобретение относится к измерител ной технике и может быть использовано для определения линейных перемеще ний и вибраций объектов, в частности биений вращающихся валов. Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является оптический датчик перемещений, содержащий оптически связанные осветитель и светочувствительный преобразователь,выполненный в виде фотоприемника, растр, расположенный между ними, и электрон ный блок, выполненный в виде системы регистрации l . Недостаток датчика заключается в том, что он не позволяет измерять линейные перемещения объекта при его поворотах, что связано в том числе и с тем, что информация поступает в ан логовой форме. Цель изобретения - контроль линейных перемещений объекта независимо от угла его поворота. Поставленная цель достигается тем, что оптический датчик перемещений, содержащий оптически связанные осветитель и светочувствительный преобразователь, растр, расположенный между ними, и электронный блок, подключенный к выходу светочувствительного преобразователя, снабжен голограммой линзы, установленной по ходу излучения между осветителем и растром и механически связываемой с контролиру емым объектом, проекционным элементом, расположеннъ1м за растром и коррекционными дефлекторными элементами, светочувствительный преобразователь выполнен в виде двух фотоприемников, расположенных на прямой, перпендикулярной линиям растра, симметрично относительно оптической оси голограммы на расстоянии г от оптической оси, равном - .где V - целое (испо, а - шаг растра.
электронный блок выполнен в виде формирователей импульсов, мостовой схемы сравнения и анализатора гармоник, выходы фотоприемников соединены с входами преобразователей импульсов, первые выходы которых подключены к входам мостовой схемы сравнения, а вторые к анализатору гармоник, коррекционные дефлекторые элементы установлены между проекционным элементом и фотоприемниками и электрически связаны с мостовой сравнения.
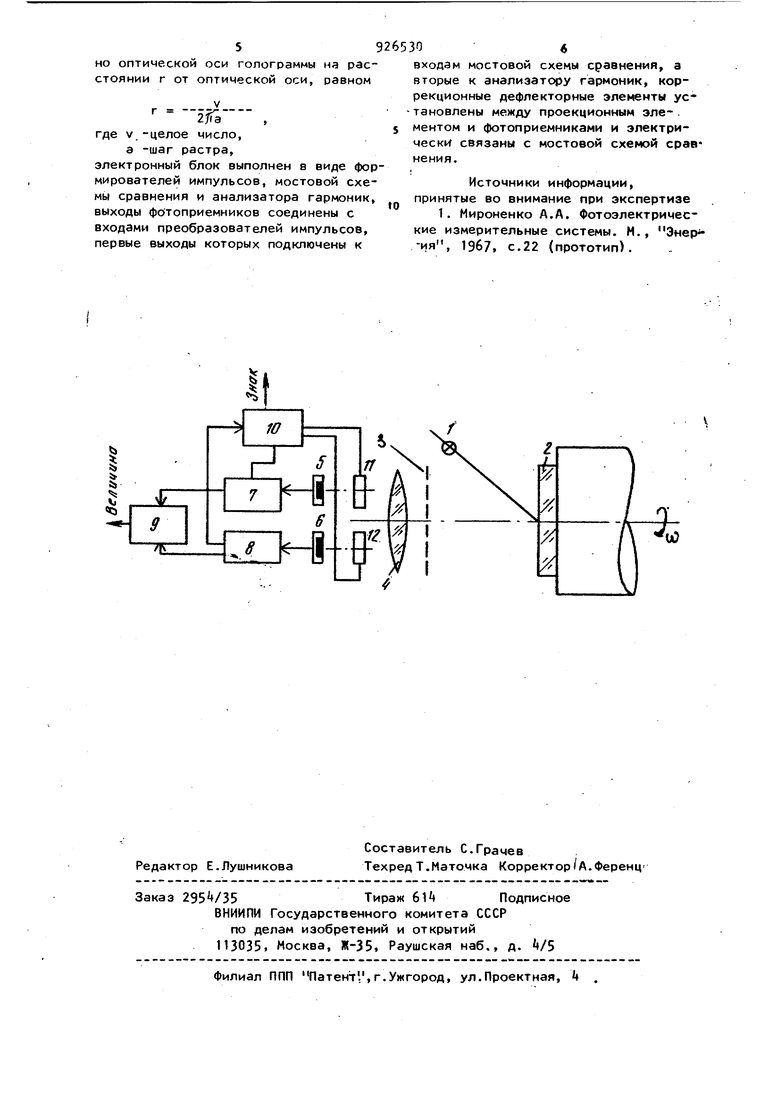
На чертеже приведена принципиальная схема датчика.
Оптический датчик перемещений со1держит осветитель 1, отражательную голограмму 2 линзы, механически связываемую с контролируемым объектом и установленную соосно с осью его поворота, растр 3 проекционный элемент Ц, фотоприемники 5 и 5, расположенные на прямой, перпендикулярной линиям растра 3 симметрично относительно оптической оси голограммы 2 на расстоянии г относительно оптической оси, формирователи 7 и 8 импульсов, входы которых подключены к выходам фотоприемников 5 и 6, анализатор 9 гармоник, входы которого подключены к первь1М выходам формирователей 7 и 8 импульсов, мостовую схему 10 сравнения импульсов, на входы которой подаются сигналы со вторых выходов формирователей 7 и 8 импульсов, и коррекционные дефлекторные элементы 11 и 12, электрически связанные с мостовой схемой 10 сравнения .
Датчик работает следующим образом.
Осветитель 1 подсвечивает отражательную голограмму 2 линзы. При оптическом сопряжении голограммы 2 и линейного растра 3 и отсутствии виброперемещений контролируемого объекта, при вращении последнего образуется изображение двух зонных решеток Френеля, которые проекционным элементом А переносятся в плоскость фотоприемников 5 и 6. Фазы освещенности изображений зонных решеток сдвинуты относительно друг друга на 180°, что приводит к освещению центра одной решетки, в то время, как в центре изображения другой решетки засветка отсутствует. При наличии виброперемещений, т.е. при взаимном смещении голограммы 2 и линейного растра 3 в направлении, перпендикулярном лини
ям растра, изменяются фазы освещен ности изображений зонных решеток, и происходит их поперечное смещениеФормирователи 7 и 8 импульсов пр изводят разделение постоянной и переменной составляющей сигналов фотоприемников 5 и 6. Переменная составляющая сигналов подается в анализатор 9 гармоник, а постояннная - в мо
товую схему 10.
Переменная составляющая выходного сигнала анализа тора 9 гармоник по частоте пропорциональна величине смещения объекта.
В мостовой схеме 10 сравнения производится сравнение постоянной составляющей сигнала с опорным напряжением. Тем самым определяется знак перемещения, при этом формируется
электрический сигнал коррекции положения изображений зонных решеток Френеля на светочувствительных площадках фотоприемников 5 и 6, который подается на коррекционные дефлекторные элементы 11 и 12, выполненные, например, в виде поворотных зеркал.
Таким образом, снабжение голограммой линзы и проекционным элементом . оптического датчика при. предлагаемом
выполнении светочувствительного преобразователя и электронной схемы позволяет получить информацию о линейном перемещении независимо от поворота объекта.
Формула изобретения
Оптический датчик перемещений, содержащий оптически связанные осветитель и светочувствительный преобразователь, растр, расположенный между ними, и электронный блок, подключенный к выходу светочувствительного преобразователя, отличающийся тем, что, с целью контроля линейных перемещений объекта независимо от угла его поворота, он снабжен голограммой линзы, установленной по ходу и;злучения между осветителем и растром и механически связываемой с контролируемым объектом, проекционным элементом, расположенным за растром, и коррекционными дефлекторными элементами, светочувствительный преобразователь выполнен в виде двух фотоприемников, расположенных на прямой, перпендикулярной линиям растра, симметрично относительно оптической оси голограммы на расстоянии г от оптической оси, равном
V
г
,
где V -целое число,
а -шаг растра,
электронный блок выполнен в виде формирователей импульсов, мостовой схемы сравнения и анализатора гармоник, выходы фотоприемников соединены с входами преобразователей импульсов, первые выходы которых подключены к
входам мостовой схемы сравнения, а вторые к анализатору гармоник, коррекционные дефлекторные элементы установлены между проекционным эле-. ментом и фотоприемниками и электрически связаны с мостовой схемой сравнения.
Источники информации, принятые во внимание при экспертизе
