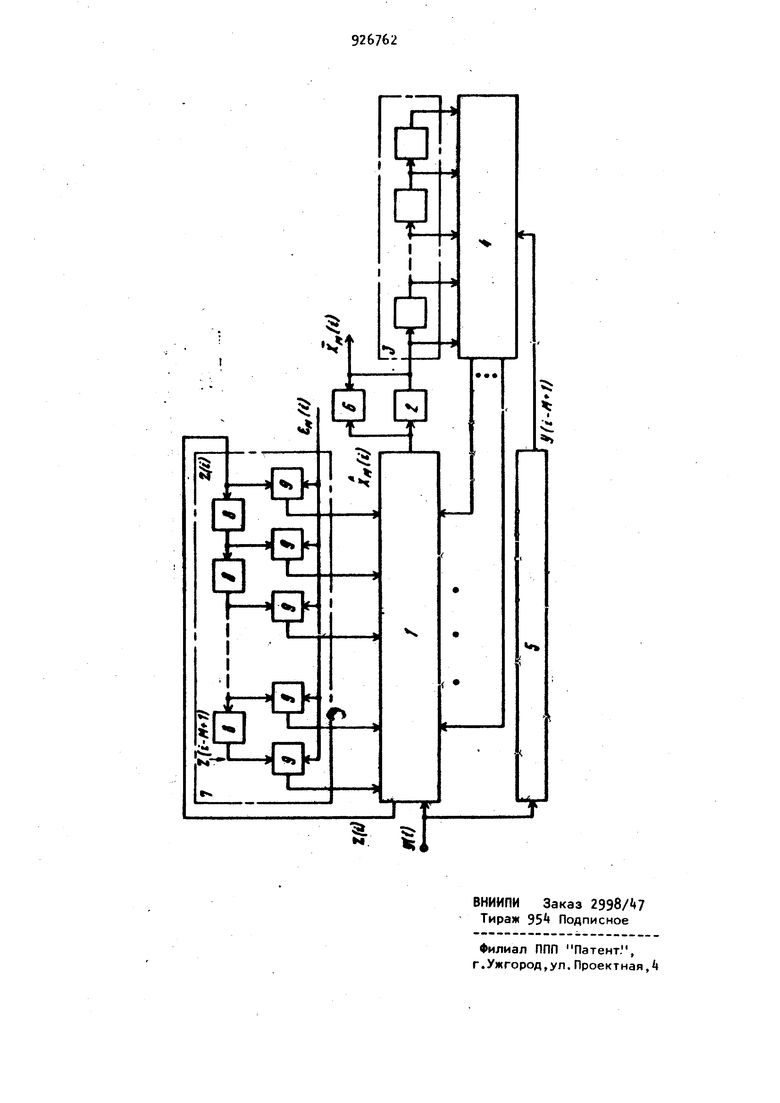
Изобретение относится к радиотехнике и может применяться для коррекции межсимвольных искажений сигналов многопозиционной амплитудой, фазовой или же амплитудно-фазовой модуляции. Известен фильтр-Калмана, выполненный на линиях задержки с отводами и содержащий коэффициенты усиления обратной связи и коэффициенты усиления прямой связи ГТ. Однако определение коэффициентов усиления прямой связи возможно лишь при использовании ЭЦВМ. Известно также адаптивное фильтрую щее устройство, содержащее фильтр Кал мана, вход которого подключен к входной шине и через первую линию задержки подключен к входу идентификатора, управляющие входы подключены к управляющим выходам идентификатора, а выход через последовательно .соединенные решающий блок и вторую линию задержки - к управляющим входам идентификатора 2. Однако недостатком известного устройства является чрезмерная сложность вычислений коэффициентов усиления, вычисление которых не использует коррекции выходного сигнала фильтра Калмана, что не позволяет отслеживать изменение дисперсии помех в канале, и определяет, в конечном счете, точность фильтрации. Цель изобретения - повышение точ ности фильтрации. Указанная цель достигается тем, что в адаптивное фильтрующее устройство, содержащее фильтр Калмана, вход которого подключен к входной шине и через первую линию задержки подключен к входу идентификатора, управляющие вхрды подключены к управляющим выходам идентификатора, а выход через последовательно соединенные решающий блок и вторую линию задержки - к управляющим входам идентификатора, введены вычислитель коэффициентов усиления, вход которого соеди39иен с дополнительным выходом фильтра Калмана, а управляющие выходы - с дополнительными управляющими входами фильтра Калмана, и блок сравнения, первый вход которого подключен к выходу фильтра Калмана второй вход к выходу решающего блока, а выход к управляющим входам вычислителя коэффициентов усиления. Вычислитель коэффициентов усиления содержит линию задержки, вход которой является его входом, а каж|Дый отвод которой подключен к первому входу соответствующего перемножителя, вторые входы которых обьединены и являются управляющим входом, а выходы - управляющими выходами вычислителя коэффициентов усиления. На чертеже изображена структурная электрическая схема адаптивного филь рующего устройства. Устройство содержит фильтр Калмана 1 , решающий блок 2, линию 3 задержки, состоящую из звеньев задержки, идентификатор (параметров кана ла связи), линию 5 задержки, блок 6 сравнения и вычислитель 7 коэффициентов усиления. Причем входы блока 6сравнения соединены с входом и выходом решающего блока 2. Выход решающего блока 2 соединен с одним входом вычислителя 7 другой вход которого соединен с выходом фильтра Калмана 1 Выходы вычислителя 7 соединены с управляющими входами соответствующих регуляторов усиления фильtpa Калма на 1. Вычислитель 7 коэффициентов усиле ния Калмана состоит из линии 8 задер ки с отводами и перемножителей 9При этом число отводов линии 8 задер ки вычислителя 7 равно числу звеньев задержки фильтра Калмана 1. Вход линии 8 задержки вычислителя 7соединен с выходом фильтра Калмана 1,, а отводы линии 8 задержки соединены с первыми входами перемножителей 9. вторые входы которых сое.динен с выходом блока 6 сравнения. Выходы перемножителей 9 соединены с упра ляющими входами соответствующих регу ляторов усиления фильтра Калмана 1 (не показаны). Устройство работает следующим образом. Дискретный сигнал y(i) поступает на вход фильтра Калмана 1, на входах звеньев задержки которого формируется оценка вектора состояния X(i) в соответствии с известным алгоритмом фильтрации (i-l)+KfyCi)-cF Xu-1), (1) rfleiX(i)X(i),..., Х|(1)|1оценка вектора состояния для i-го момента времени; e,,..., оценка вектора коэффициентов усиления обратной связи,элементы которого численно равны отсчетам импульсной характеристики канала связи; - вектор коэффициентов усиления Калмана; 00 ...010 ..-О матрица сдвига LOO.-.IOj размером . Неизвестными в уравнении оценки являются вектор параметров канала С и вектор коэффициентов усиления К. Для определения вектора параметров канала С служит идентификатор k параметров канала, на вход линии 3 задержки которого поступают регенированные элементы вектора состояния Х|(1), В каждый i-й момент времени на отводах линии 3 задержки находится вектор состояния X(i-M+1), отличающийся от переданного X(i-M+1) тем, что в некоторых случаях может иметь место ошибочное решение, т.е. оценка символа может отличаться от его истинного значения. Если вероятность ошибки Рдц, 0,01, то ложные решения практически не сказываются на процессе идентификации и поэтому на выходах идентификатора вырабатывается оценка вектора параметров канала связи. . Вектор коэффициентов усиления в устройстве определяется адаптивно с применением ошибки корректирования последней компоненты вектора состояния. Для этого сигнал ошибки ц(1) с выхода блока 6 сравнения поступает на одноименные входы перемножителей 9. На вторые входы этих перемножителей 9 поступают сигналы с отводов линии 8задержки. На выходах перемножителей 9формируются сигналы управления коэффициентами усиления. Работа адаптивного вычислителя коэффициентов усиления Калмана описывается векторным разностным уравнением КС1+П К(:П-,€м(1)г(1), ; Z0)(),... - вектор, элементы iT которого ,iU-w+) сигналам с отводов линии задерж ки вычислителя; )-ХцдО)-лцу11) - ошибка оцениваПИЯ последней ко поненты вектора состояния; постоянный множитель (не пока зан). Установившееся значение вектора ко эффициентов усиления К в точности совпадает с его оптимальным значением, определяемым из системы матричных уравнений (1), т.е. (1) КотПредлагаемое устройство отличается от известного тем, что в нем для модификации коэффициентов усиления всегда используется ошибка коррекции выходного сигнала фильтра. Это дает возможность постоянно отслеживать изменение дисперсии помех в канале, т.е. повышать точность фильтрации, а также вычислять оптимальные параметры Калмана без применения ЭЦВМ. Применение адаптивных фильтров Кал мана в технике передачи данных позволяет снизить среднеквадратическую погрешность корректирования на несколько порядков, что приводит к существенному снижению вероятности ошиб ки на приеме. Формула изобретения 1.- Адаптивное фильтрующее устройст во, содержащее фильтр Калмана, вход которого подключен к входной шине и через первую линию задержки подключен к входу идентификатора, управляющие входы подключены к управляющим выходам идентификатора, а выход через последовательно соединенные решающий блок и вторую линию задержки - к управляющим входам |дентификатора, отличающееся тем, что, с целью повышения точности фильтрации, в него введены вычислитель коэффици ентов усиления, вход которого соединен с дополнительным выходом фильтра Калмана, а управляющие выходы с дополнительными управляющими входами фильтра Калмана, и блок сравнения, первый вход которого подключен к выходу фильтра Калмана, второй вход к выходу решающего блока, а выход к управляющим входам вычислителя коэффициентов усиления. 2. Устройство по п. 1, о т л и чающееся тем, что вычислитель коэффициентов усиления содержит линию задержки, вход которой является его входом, а каждый отвод которой подключен к первому входу соответствующего перемножителя, вторые входы которых обьединены и являются управляющим входом, а выходы управляющими выходами вычислителя коэффициентов усиления. Источники информации, принятые во внимание при экспертизе 1.Zawence R., Kaufman Н. The Kalnan filter for the egualization of a dihital communications charmels. transactions on communications, 1971, № 19, p. 1137-11 1. 2.Zee Т., Cunuingham D. Kalman filter eguatization for QPSK comnunications. trausactions on comunications, 1973, 3,V .21, p. 361-361, fig. (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное фильтрующее устройство | 1987 |
|
SU1436271A1 |
| Двумерный адаптивный фильтр Калмана | 1980 |
|
SU964980A1 |
| Адаптивное рекурсивное устройство фильтрации комплексных сигналов | 1979 |
|
SU890544A1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| Адаптивный рекурсивный фильтр | 1979 |
|
SU813705A1 |
| ЦИФРОВОЙ АДАПТИВНЫЙ КОРРЕКТОР | 1983 |
|
RU2024199C1 |
| Устройство для адаптивного приема дискретных сигналов | 1982 |
|
SU1083396A1 |