Изобретение относится к радиотехнике и может использоваться в радиотехнических системах измерения параметров траекторий летательных аппаратов (дальность - скорость, скорость - ускорение, угловая координата - скорость изменения угловой координаты).
Известны: следящий измеритель дальности, содержащий α-β-фильтр (Кузьмин С. З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 166, прототип); следящий измеритель, содержащий шесть фильтров Калмана (авторское свидетельство СССР N 1061082, кл. G 01 S 13/66, 1983); линейное адаптивное устройство обработки данных, содержащее 12 фильтров Калмана (авторское свидетельство РФ N 2052835, кл. G 01 S 13/02, 1996).
Недостатками этих следящих измерителей являются либо низкая точность фильтрации данных вследствие расходимости оценок вектора состояния при нелинейном законе изменения отслеживаемых фазовых координат (прототип), либо высокие требования к вычислительной системе по объему памяти и быстродействию.
Из известных технических решений наиболее близким (прототипом) является следящий измеритель дальности, содержащий α-β-фильтр, содержащий вычитающее устройство, на первый выход которого подается измеряемая величина, а выход соединен с первым и вторым усилителями, первый сумматор, выход которого соединен с первым блоком задержки, выход которого соединен с первым входом второго сумматора, третий усилитель, вход которого соединен с выходом второго усилителя, а выход с первым входом третьего сумматора, второй блок задержки, вход которого соединен с выходом третьего сумматора, а выход с четвертым усилителем и вторым входом третьего сумматора, выход четвертого усилителя соединен с вторым входом второго сумматора, выход которого соединен с вторым входом первого сумматора и вторым входом вычитающего устройства.
Известное устройство проводит обработку данных в соответствии с алгоритмом
Xи(k) = X(k)+ξи(k). (5)
где X - текущее значение отслеживаемой координаты; Xэ - экстраполированное на следующий шаг обработки значение отслеживаемой координаты; Xи - измеренное значение отслеживаемой координаты; X0 - начальное значение отслеживаемой координаты,  текущее, экстраполированное и начальное значения скорости изменения отслеживаемой координаты соответственно;
текущее, экстраполированное и начальное значения скорости изменения отслеживаемой координаты соответственно;  оценки отслеживаемой координаты и скорости ее измерения соответственно; ξид - шум измерений с математическим ожиданием равным нулю и известной дисперсией; k - шаг дискретизации; ΔT - интервал обработки; α и β - постоянные коэффициенты усиления.
оценки отслеживаемой координаты и скорости ее измерения соответственно; ξид - шум измерений с математическим ожиданием равным нулю и известной дисперсией; k - шаг дискретизации; ΔT - интервал обработки; α и β - постоянные коэффициенты усиления.
Недостатком прототипа является низкая точность сопровождения фильтруемых параметров вследствие постоянства коэффициентов α и β, выбор которых производится с учетом противоречивых требований к точности и устойчивости сопровождения цели: увеличение значений α и β приводит к повышению точности оценивания координат при снижении запаса устойчивости, кроме этого, при появлении в законе изменения сопровождаемой координаты второй и более высоких производных возникают нарастающие во времени динамические ошибки сопровождения, что неизбежно приведет к его срыву.
Таким образом, задачей изобретения является повышение точности и устойчивости работы следующего измерителя с α-β-фильтром в условиях неопределенности закона изменения сопровождаемой координаты и интенсивностей шумов системы.
Поставленная задача достигается тем, что в следующий измеритель с α-β-фильтром, содержащим вычитающее устроство, на первый вход которого подается измеряемая величина, а выход соединен с первым и вторым усилителями, первый сумматор, выход которого соединен с первым блоком задержки, выход которого соединен с первым входом второго сумматора, третий усилитель, выход которого соединен с первым входом третьего сумматора, второй блок задержки, вход которого соединен с выходом третьего сумматора, а выход с четвертым усилителем и вторым входом третьего сумматора, выход четвертого усилителя соединен с вторым входом второго сумматора, выход которого соединен с вторым входом первого сумматора и вторым входом вычитающего устройства, дополнительно ведены первый и второй коммутаторы между первым усилителем и первым сумматором и вторым усилителем и третьим усилителем соответственно, а именно первые входы коммутаторов соединены с выходами первого и второго усилителей, вторые входы соединены с выходами введенных второго и третьего перемножителей, выход первого коммутатора соединен с первым входом первого сумматора, а выход второго коммутатора - с входом третьего усилителя, управляющие входы коммутаторов соединены с выходом порогового устройства, вход которого соединен с выходом вычитающего устройства, первые входы второго и третьего перемножителей соединены с выходом вычитающего устройства, второй вход второго перемножителя соединен с выходом вычислителя, второй вход третьего перемножителя соединен с выходом пятого усилителя, вход которого соединен с выходом вычислителя, вход которого соединен с выходом первого перемножителя, оба входа которого соединены с выходом вычитающего устройства.
На чертеже представлена структурная электрическая схема следящего измерителя с адаптивным α-β-фильтром, где 1 - вычитающее устройство, 2 - первый усилитель, 3 - первый коммутатор, 4 - первый сумматор, 5 - первый блок задержки, 6 - второй сумматор, 7 - первый перемножитель, 8 - пороговое устройство, 9 - четвертый усилитель, 10 - второй перемножитель, 11 - вычислитель, 12 - второй усилитель, 13 - второй коммутатор, 14 - третий усилитель, 15 - третий сумматор, 16 - второй блок задержки, 17 - пятый усилитель, 18 - третий перемножитель.
Функционально следящий измеритель состоит из фильтра оценки измеряемой координаты, в состав которого входят последовательно соединенные вычитающее устройство 1, первый усилитель 2, первый коммутатор 3, первый сумматор 4, первый блок задержки 5 и второй сумматор 6, из фильтра оценки скорости изменения измеряемой координаты, в состав которого входят последовательно соединенные второй усилитель 12, второй коммутатор 13, третий усилитель 14, третий сумматор 15, второй блок задержки 16 и четвертый усилитель 9, и из блока адаптации к текущим ошибкам экстраполяции, в состав которого входят первый перемножитель 7, пороговое устройство 8, второй перемножитель 10, вычислитель 11, пятый усилитель и третий перемножитель 18.
Алгоритм работы следящего измерителя с адаптивным α-β-фильтром описывается следующими уравнениями:
где Dи - дисперсия ошибок измерителя - вычисляется в соответствии с правилом
Dи = -(1+α)ΔX
α - постоянный коэффициент усиления,
ΔX0 - допустимая величина ошибки сопровождения.
Рассмотрим, как происходит формирование этого алгоритма. За один такт T до начала работы адаптивного α-β-фильтра по результатам предварительных измерений в каналы оценки отслеживаемой координаты и скорости ее изменения через первый 4 и третий 15 сумматоры соответственно вводятся начальные значения отслеживаемой координаты X0 и скорости ее изменения  которые в виде
которые в виде  через время T формируются на выходах блоков задержки 5 и 16. Усиленное в T раз значение
через время T формируются на выходах блоков задержки 5 и 16. Усиленное в T раз значение  складывается во втором сумматоре 6 с
складывается во втором сумматоре 6 с  в результате чего формируется экстраполированное значение отслеживаемой координаты Xэ(k) (10), которое подается на второй вход вычитающего устройства 1. При поступлении измеренного значения отслеживаемой координаты Xи (11) на выходе вычитающего устройства 1 формируется невязка измерений ΔX(k) (9), которая поступает на первый 2 и второй 12 усилители, первый 7, второй 10 и третий 18 перемножители и на пороговое устройство 8. Если величина невязки ΔX(k) (9) не превышает допустимой величины ошибки сопровождения ΔX0 (6), то с выхода порогового устройства 8 сигналы на коммутаторы 3 и 13 не поступают и на входы первого сумматора 4 и третьего усилителя 14 подаются соответственно усиленные в первом усилителе 2 в α раз, а во втором усилителе 12 в β раз значения невязки ΔX(k). На выходе первого сумматора 4 в соответствии с (7) формируется оценка отслеживаемой координаты
в результате чего формируется экстраполированное значение отслеживаемой координаты Xэ(k) (10), которое подается на второй вход вычитающего устройства 1. При поступлении измеренного значения отслеживаемой координаты Xи (11) на выходе вычитающего устройства 1 формируется невязка измерений ΔX(k) (9), которая поступает на первый 2 и второй 12 усилители, первый 7, второй 10 и третий 18 перемножители и на пороговое устройство 8. Если величина невязки ΔX(k) (9) не превышает допустимой величины ошибки сопровождения ΔX0 (6), то с выхода порогового устройства 8 сигналы на коммутаторы 3 и 13 не поступают и на входы первого сумматора 4 и третьего усилителя 14 подаются соответственно усиленные в первом усилителе 2 в α раз, а во втором усилителе 12 в β раз значения невязки ΔX(k). На выходе первого сумматора 4 в соответствии с (7) формируется оценка отслеживаемой координаты  В канале оценки скорости изменения отслеживаемой координаты на выходе третьего сумматора 15 в соответствии с (8) формируется оценка скорости изменения отслеживаемой координаты
В канале оценки скорости изменения отслеживаемой координаты на выходе третьего сумматора 15 в соответствии с (8) формируется оценка скорости изменения отслеживаемой координаты  Полученные оценки далее используются потребителями и при формировании экстраполированного значения отслеживаемой координаты Xэ(k) (10) на следующий такт измерений по вышеописанному алгоритму.
Полученные оценки далее используются потребителями и при формировании экстраполированного значения отслеживаемой координаты Xэ(k) (10) на следующий такт измерений по вышеописанному алгоритму.
Если величина невязки ΔX(k) (9) превышает допустимую величину ошибки сопровождения ΔX0 (6), то с выхода порогового устройства 8 на коммутаторы 3 и 13 поступают коммутирующие сигналы, в результате чего на входы первого сумматора 4 и третьего усилителя 14 подаются соответственно значения невязки ΔX(k), усиленные во втором перемножителе 10 в αк раз и в третьем перемножителе 18 в βк раз. Величина αк формируется в результате возведения в квадрат невязки ΔX(k) в первом перемножителе 7 и вычислении его в вычислителе 11 в соответствии с формулой (12). Величина βк формируется на выходе пятого усилителя 17 в результате усиления сигнала αк в β/α раз (формула (13)). В результате такой коммутации коррекция прогнозируемых значений Xэ в канале отслеживаемой координаты и  в канале оценки скорости ее изменения будет более интенсивная, адаптируемая к текущим ошибкам прогноза.
в канале оценки скорости ее изменения будет более интенсивная, адаптируемая к текущим ошибкам прогноза.
Для выполнения заявленного устройства может быть использована элементная база, выпускаемая в настоящее время отечественной промышленностью.
Использование изобретения по сравнению с прототипом за счет адаптации коэффициентов усиления невязки к текущим ошибкам экстраполяции отслеживаемого процесса позволит, как показало моделирование его алгоритмов, повысить устойчивость функционирования следящих измерителей, точность оценки сопровождаемой координаты на 10-40% и уменьшить время переходных процессов при больших ошибках первичных измерений в 1,2 - 1,5 раза.
Кроме того, предложенный алгоритм практически не требует ни повышения быстродействия вычислителя, реализующего его вычисление, ни увеличения объема его памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА | 2004 |
|
RU2253131C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТЕЙ И УСКОРЕНИЙ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2000 |
|
RU2192022C2 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| СПОСОБ И СИСТЕМА ИДЕНТИФИКАЦИИ ИЗМЕРЕНИЙ В МНОГОДИАПАЗОННЫХ РЛС | 2014 |
|
RU2574075C1 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
Следящий измеритель с адаптивным фильтром предназначен для измерения параметров траекторий летательных аппаратов, таких как дальность - скорость, скорость - ускорение, угловая координата - скорость изменения угловой координаты. Он состоит из фильтра оценки измеряемой координаты и из блока адаптации, введение которого в существующий измеритель позволило адаптировать его к текущим ошибкам экстраполяции. Технический результат заключается в том, что позволяет повысить устойчивость функционирования измерителя, точность оценки сопровождаемых координат на 10-40% и уменьшить время переходных процессов в 1,2-1,5 раза, при этом не потребовав от вычислителя ни повышения быстродействия, ни увеличения объема его памяти. 1 ил.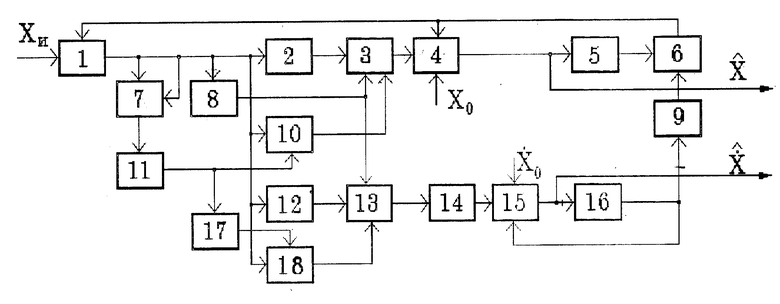
Следящий измеритель с адаптивным фильтром, содержащий вычитающее устройство, на первый вход которого подается измеряемая величина, а выход соединен с первым и вторым усилителями, первый сумматор, выход которого соединен с первым блоком задержки, выход которого соединен с первым входом второго сумматора, третий усилитель, выход которого соединен с первым входом третьего сумматора, второй блок задержки, вход которого соединен с выходом третьего сумматора, а выход - с четвертым усилителем и вторым входом третьего сумматора, выход четвертого усилителя - с вторым входом второго сумматора, выход которого соединен с вторым входом первого сумматора и вторым входом вычитающего устройства, отличающийся тем, что в него введены первый и второй коммутаторы между первым усилителем и первым сумматором и вторым усилителем и третьим усилителем соответственно, а именно первые входы соответственно первого и второго коммутаторов соединены с выходами первого и второго усилителей, вторые входы - с выходами введенных второго и третьего перемножителей, выход первого коммутатора - с первым входом первого сумматора, а выход второго коммутатора - с входом третьего усилителя, управляющие входы коммутаторов соединены с выходом порогового устройства, вход которого соединен с выходом вычитающего устройства, первые входы второго и третьего перемножителей - с выходом вычитающего устройства, второй вход второго перемножителя - с выходом вычислителя, второй вход третьего перемножителя - с выходом пятого усилителя, вход которого соединен с выходом вычислителя, вход которого соединен с выходом первого перемножителя, оба входа которого соединены с выходом вычитающего устройства.
| Кузьмин С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации.-М.: Радио и связь, 1986, с.166 | |||
| RU 2052835 C1, 20.01.1996 | |||
| Следящий измеритель | 1982 |
|
SU1061082A1 |
| US 5214433 A, 25.05.1993 | |||
| US 5325098 A, 28.06.1994. | |||

