Изобретение относится к электросвязи и может использоваться для пе редачи данных по широкополосному каналу первичной группы.
Известно устройство, содержащее автоматический регулятор уровня, демодулятор, фильтр нижних частот, стробирующее устройство, поэлементную решающую схему, блок подстройки -фазы момента стробирования, блок подстройки опорного колебания, блок вьщеления пилот-сигнала, блок преобразования дуобинарного сигнала в биполярный lj .
Однако отсутствие адаптивной коррекции приводит к ухудшению помехоустойчивости при неидеальных характеристиках канала связи.
Наиболее близким по технической сущности к предлагаемому является устройство для адаптивного приема дискретных сигналов, содержащее демодулятор, управляющий вход которого подключен к выходу блока подстройки опорного колебания, а выход - к входу фильтра нижних частот, выход которого соединен с входом стробирующего блока, управляющий вход которого соединен с выходом блока подстройки фазы момента стробирования, выход стробирующего блока соединен с входом адаптивного корректора, управляющий вход которого соединен с первым входом блока подстройки опорного колебания и выходом блока вычисления ошибки, выход адаптивного корректора соединен с входом решающего блока и первым входом блока вычисления ошибки, второй вход которого соединен с выходом решающего блока, при этом управляющий выход адаптивного корректора подключен к входу блока подстройки фазы момента стробирования 2 .
В известном устройстве наличие в канале амплитудно-частотных искажений приводит к потере помехоустойчивости при линейном методе обработки принятого сигнала и поэлементном правиле вынесения решения о принятом символе.
Цель изобретения - повьщгение помехоустойчивости.
Для достижения поставленной цели в устройство для адаптивного приема дискретных сигналов, содержащее демодулятор, управляющий вход которого подключен к выходу блока подстройки опорного колебания, а выход - к входу фильтра нижних частот, выход которого соединен с входом стробирующего блока, управляющий вход которого соединен с выходом блока подстройки фазы момента стробирования, выход стробирующего блока соединен с входом адаптивного корректора, управляющий вход которого соединен с первым входом блока подстройки опорного колебания и выходом блока вычисления ошибки, выход адаптивного Корректора соединен с входом решающего блока и первым входом блока вычисления ошибки, второй вход которого соединен с выходом решающего блока, при этом управляющий выход адаптивного корректора подключен к входу блока подстройки фазы момента стробирования, введены артоматический регулятор уровня, вычислительный блок и дополнительный решающий блок, при этом выход адаптивного корректора соединен с входом вычислительного блока, выходы которого соединены с соответствующими входами дополнительного решающего блока, управляющий выход которого соединен с управляющим входом вычислительного блока, причем вход демодулятора соединен с выходом автоматического регулятора уровня, вход которого является входом устройства, а выход дополнительного решающего блока соединен с входом декодера, выход которого является выходом устройства, а выход стробирующего блока соединен с вторым входом блока подстройки опорного колебания.
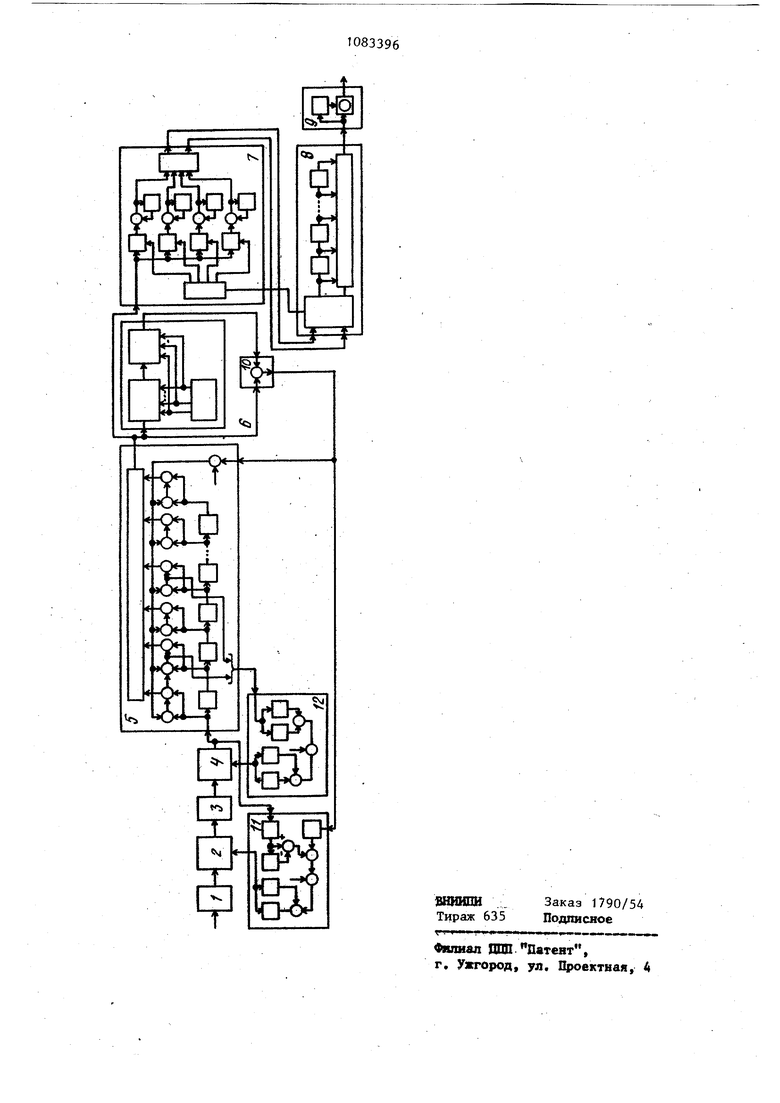
На чертеже изображена структурная электрическая схема предлагаемого устройства.
Устройство для адаптивного приема дискретных сигналов содержит автоматический регулятор 1 уровня, демодулятор 2, фильтр 3 нижних частот, стробирующий блок 4, адаптивный корректор 5, решающий блок 6, вычислительньй блок 7, дополнительный решающий блок 8, декодер 9, блок 10 вычисления ошибки, блок t1 подстройки фазы момента стробирования.
Устройство работает следующим образом.
Принятый сигнал поступает на вход автоматического регулятора 1 уровня. Затем сигнал демодулируется и фильтруется. Необходимое для демодуляции опорное колебание вырабатывается в блоке 12. Блок 12 подстройки опорного колебания содержит генератор опорного колебания, линии задержки на 1 и 2 единичных интервала Т, умножители и сумматоры. Синхроинформация для п5дстройки фазы опорного колебания выделяется непосредственно из рабочего сигнала данных, и в соответствии с выражением 4n 4n-r|«cfV7i vi-r n-3)7 где (о - оценка фазы опорного колебания на И -м шаге подстройки;ff, - сигнал ошибки, вычисляемый как разность между откорректированным сигналом и эталоном; Зц - отсчет отфильтрованного по ле демодуляции сигнала; |U(o - малое вещественное число, используется для подстройки фазы опорного колебания. Данное выражени является модификацией оценки фазы по критерию максимального правдоподобия. Использование отфильтрованно го после демодуляции сигнала для подстройки опорного колебания позво ляет компенсировать не только расхождение фаз и частот несущего и опорного колебаний, но и качание фазы несущего колебания. После фильтрации принятьй сигнал стробируется в стробирующем блоке 4 Выбором фазы момента стробирования управляет блок 11 подстройки фазы момента стробирования, который содержит генератор тактового колебани линии задержки сигналов, соответствующих значениям коэффициентов усил ния по 1 и -1 отводам линии задержки адаптивного корректора, на единичный интервал Т, умножитель и сум маторы. Постройка фазы момента стро бирования осуществляется с композицией отсчетов импульсной характерис тики адаптивного корректора, что по воляет гарантировать сходимость сов местной оценки усиления регуляторов отводов гармонического корректора и фазы момента стробирования. Данная операция описывается выражением VV/l tKn-i- M.n.-., где ц - оценка фазы момента строби рования, вычисляемая на fi-M шаге подстройки; i,,n- значения коэффициентов усиления регуляторов в отводах линии задержки адаптивного корректора, ближайщих к центральному; малое вещественное число. Далее сигнал подвергается коррекции в адаптивном корректоре 5, который является адаптивным нерекурсивным фильтром, настраиваемым по крите рию минимума среднеквадратической ошибки. Он реализован на линии задержки с отводами, расположенными через единичный интервал равный Т. Регуляторы адаптивного корректора вьтолняются на умножителях. Коэффициент усиления i -го регулятора определяется произведением выборки принятого сигнала, поступающего с отвода линии задержки, и сигнала ошибки, общего для всех регуляторов. Операция настройки коэффициентов определяется выражением I snii- i..n 1 где С - коэффициент усиления t, -гЪ регулятора на п -м шаге подстройки; сигнал ошибки на управляющем входе адаптивного корректора на П -м шаге подстройки; отсчет сигнала на i -м отводе линии задержки адаптивного корректора на tt-м шаге подстройки; (Мд - малое вещественное число. Сигналы с выходов регуляторов адаптивного корректора 5 объединяются в сумматоре и поступают для дальнейшей обработки в решающий блок 6, который является поэлементным решающим блоком, откорректированный сигнал сравнивается с эталонными значениями и наиболее близкий эталонный сигнал поступает на выход решающего блока 6. Этот процесс эквивалентен сопоставлению каждому принятому сигналу соответствзпощего переданного символа, поскольку на передающей стороне имеется однозначное соответствие передаваемого сигнала информационному символу. С входа и выхода решанмцего блока 6 сигналы поступают в блок 10 вычис-1 ошибки, в котором осуществля-ется вычисление сигнала ошибки, необходимого для подстройки фазы опорного колебания и регуляторов адаптив ного корректора 5. Ошибка вычисляется как разность между сигналами на входе и выходе решающего блока 6, таким образом, блок 10 представляет собой сумматор, вычисляющий эту разность. Адаптивная подстройка позволяет оперативно отслеживать изменение частотный характеристик канала, частоты и фазы несущего колебания. Для реализации помехоустойчивости, близкой к потенциальной целесообразно ввести в состав, предлагаемого устройства систему вынесения реше ния о принятой последовательности символов в целом по критерию максимального правдоподобия, которая состоит из вычислительного блока 7 и дополнительного решающего блока 8, которьш является решакнцим блоком, выносящим ретпение в целом. Поскольку сигнал на выходе дополнительного решающего блока 8 появляется со значительной задержкой, его нецелесообраз но использовать для управления адаптивным корректором 5 и блоком 12 подстройки опорного колебания, так как при зтом невозможно оперативно отслеживать изменение частотных характеристик канала, частоты и фазы несущего колебания, а также дрожание фазы несущего колебания. В то время как поэлементно вынесенное решение о принятом символе содержит достаточ ную статистику для подстройки адаптивных систем устройства даже при весьма значительных линейных искажениях в канале связи. Так, удовлетворительная подстройка адаптивного кор ректора 5 и фазы опорного колебания возможна при вероятности ошибки при поэлементном вынесении решения поряд ка (1 - 1,5). Рекуррентная нелинейная процедура вынесения решения в целом о после довательности принятых символов по критерию максимального правдоподобия базируется на представлении системы передачи сигнала данных в виде системы с конечным числом состояний, характеризуемых -векторами 0 на VI-м шаге (единичном интервале). В качестве вектора состояний целесообразно выбрать следукмций вектор: С п-О- п-и) где (.)Т символ транспонирования; отсчет информационного а сигнала, разрешенного к передаче, причем в данном случае можно принять а 11; число ненулевых отсчетов импульсной характеристики сквозного тракта передачи сигнала данных, при использовании биполярного преобразования сигнала данных на передаче L 2. Переход системы из состоянияб., в С„ характеризуется целевой функцией, .,(;6,.,)U,, где Z, - отсчет сигнала на выходе адаптивного корректора 5. В соответствии с принципом оптимальности, начиная с Зд для Ц -1, 2,..., ..., ,1 решается функциональное урав-1 нение вида-.. ..,, где 3 - оценка целевой функции Оц для каждого из четьфех возможных векторов состояния. Выражение (6) является модификацией алгоритма Витерби применительно к испульсной характеристике биполярного преобразователя. Такой граф переходов называется выжившим. Определив последовательность состояний (j , через которые проходит вьисивший граф, нетрудно определить переданную последовательность сигналов. В вычислительном блоке 7 в соогветствии с алгоритмом (6) осуществляется вычисление оценок целевой функции J (6 ) для каждого из возможньк переходов и выбор наиболее вероятного из (ИХ. Уравнение (6) предписывает для б у, а 1 вычисление. ,„Р«.Ло,„., . и,-.)Пги-2 -1 вычисление0.h.Ua«.,MU(Zn+2) Uh-Aa,.,--ibZ .
Для выполнения этих операций в состав вычислительного блока 7 входят схемы вычисления оценок целевой функции. Основу этих схем составляют квадраторы, накапливающие сумматоры и регистры для хранения значений целевой функции, вычисленных для данного пути на предьщущем такте. Вычисленные значения целевых функций сравниваются в схеме сравнения. Результат сравнения передается в дополнительный решающий блок 8. В построителе графа этого блока определенному виду переходов на каждом единичном интервале сопоставляется определенная кодовая комбинация, записываемая затем в линию задержки дополнительного решающего блока 8. Дешифратор графа этой схемы, анализируя последовательность таких кодовых комбинаций,пос тупающих с выходов линии задержки,определяет выживший путь и вьщает на вход дополнительного решающего блока 8 соответствукицую последовательность информационных символов.
В декодере 9 осуществляются необходимые операции по снятию относительности с информационных символов, введенной биполярным преобразователем в тракт на передающей стороне (для предотвращения размножения ошибо свойственного биполярному преобразованию сигнала. Как видно из схемы, декодер 9 в случае биполярного преобразования 8 порядка состоит из линии задержки на 4 единичных интервала и сумматора по модулю два.
Таким образом, применение в предлагаемом устройстве адаптивной обработки сигнала передачи данных рекуррентной нелинейной операции вьгаесения решения в целом о принятой последовательности символов по критерию максимального правдоподобия, а также использование отфильтрованного после демодуляции сигнала для подстройки опорного колебания позволяет существенно увеличить помехоустойчивость аппаратуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ адаптивной обработки дискретных сигналов и устройство для его осуществления | 1979 |
|
SU886258A2 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
| Устройство адаптивного приема дискретных сигналов | 1990 |
|
SU1807569A1 |
| Устройство для адаптивного приема цифровых однополосных сигналов | 1989 |
|
SU1663776A2 |
| Устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией | 1986 |
|
SU1309319A1 |
| Устройство приема дискретных сигналов с относительно-фазовой модуляцией низкой кратности | 1987 |
|
SU1467786A1 |
| Устройство адаптивной обработки дискретных сигналов | 1982 |
|
SU1116542A2 |
| Устройство приема дискретных сигналов | 1984 |
|
SU1223371A1 |
| Способ адаптивной обработкидиКСРЕТНыХ СигНАлОВ и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1978 |
|
SU832731A1 |
| Устройство для адаптивного приема дискретных сигналов | 1977 |
|
SU769756A1 |
УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ, содержащее демодулятор, управляющий вход которого подключен к выходу блока подстройки опорного колебания, а выход - к ВХОДУ фильтра нижних частот, ВЫХОД которого соединен с входом стробирующего блока, управляющий ВХОД которого соединен с выходом блока подстройки фазы момента стробирования, ВЫХОД стробирующего блока соединен с ВХОДОМ адаптивного корректора, управляющий ВХОД которого соединен с первым ВХОДОМ блока подстройки опорного колебания и выходом блока вычисления ошибки, выход адаптивного корректора соединен с входом решающего блока и первым входом блока вычисления ошибки, второй вход которого соединен с выходом решающего блока, при этом управлякидий выход адаптивного корректора подключен к ВХОДУ блока подстройки фазы момента стробирования, отличающеес я тем,, что, с целью повьщ1ения помехоустойчивости, В него :введены автоматический регулятор УРОВНЯ, вычислительный блок и дополнительный решающий блок, при этом ВЫХОД адаптивв ного корректора соединен с входом вычислительного блока, выходы которо го соединены с соответствующими входами дополнительного решающего блока, управляющий ВЫХОД которого соединен с управляющим входом вычислительного блока, причем вход демодулятора соединен с выходом автоматичес1 ого эо регулятора уровня, вход которого явlAd ляется ВХОДОМ устройства, а выход :л9 дополнительного решающего блока соесо а динен с ВХОДОМ декодера, выход которого является выходом устройства, выход стробирующего блока соединен с вторым ВХОДОМ блока подстройки опорного колебания.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Fripiat I.M | |||
| Synchronous modems for data transmission on a group band circuit | |||
| Philips Telecom munication Review, V | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| ,2 | |||
| Устройство для адаптивного приема дискретных сигналов | 1977 |
|
SU769756A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
