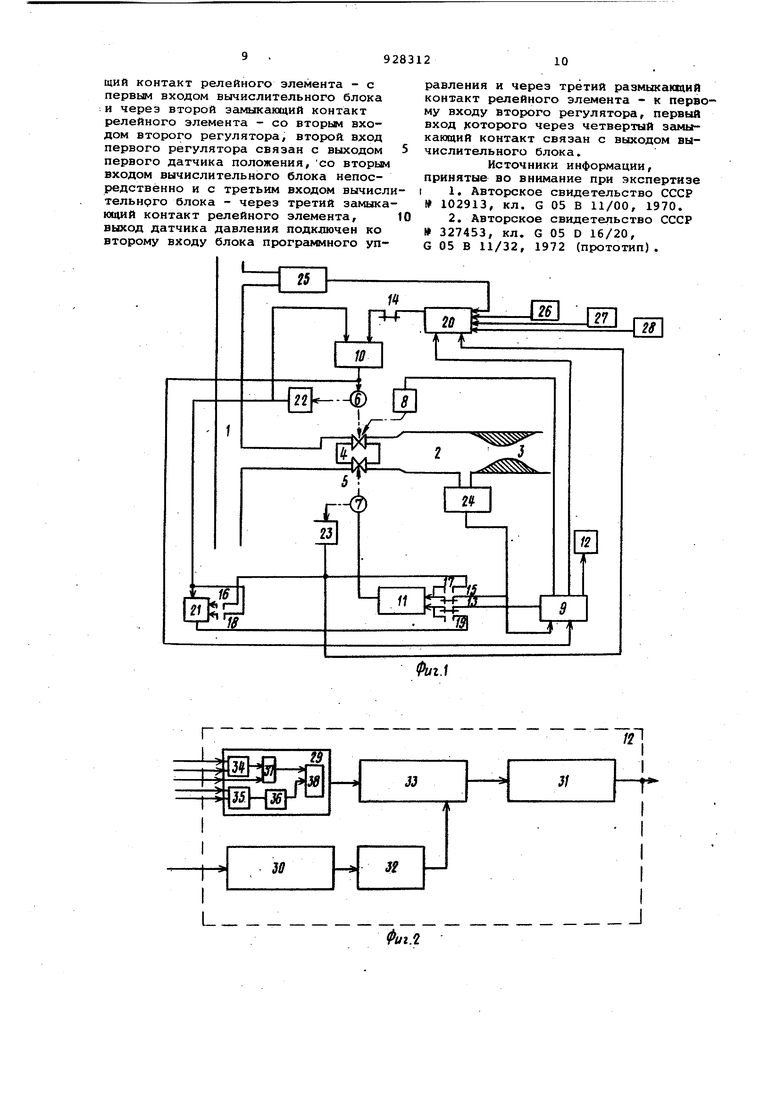
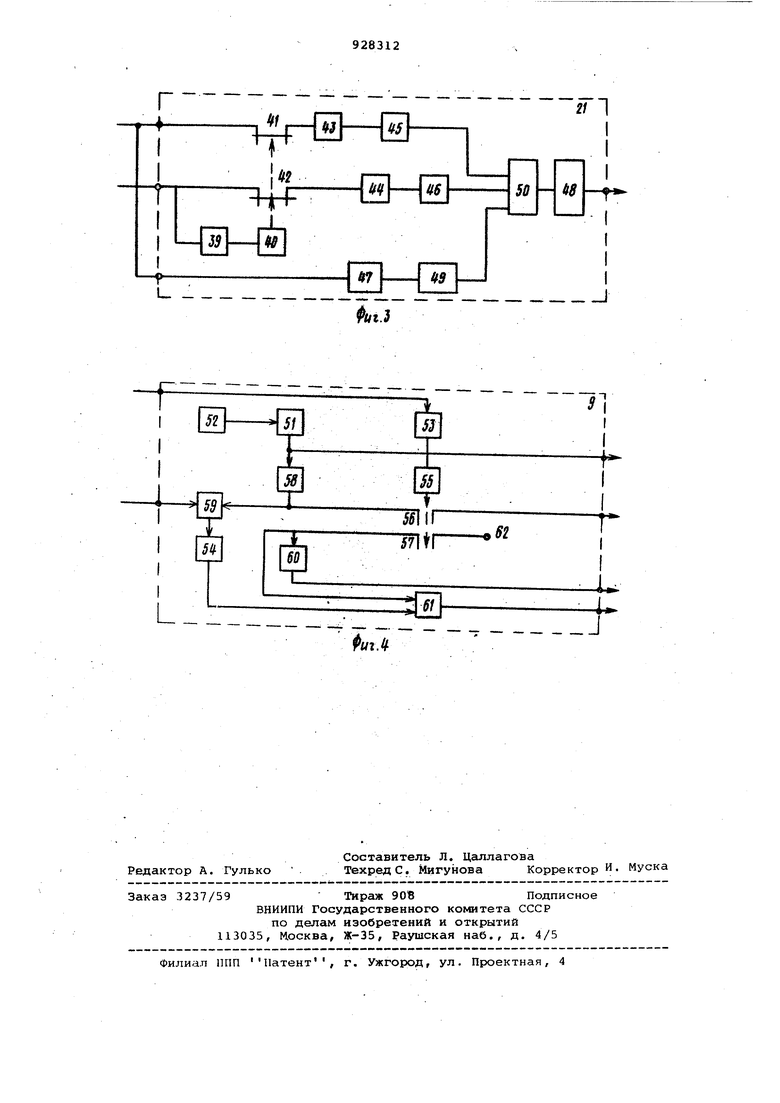
Изобретение относится к автоматическому управлению непрерывными и циклическими процессами и может быть использовано для управления объектами, оснащенными несколькими регулирующими органами, по крайней мере один из которых снабжен разноскорост ными приводами, например, для регулирования давления в экспериментальных газодинамических установках. Известны устройства для регулирования давления в газодинамических установках с одним исполнительным органом, содержащие датчик давления, задатчик, регулятор и блок расчета положения исполнительного органа 1 Недостатком этого устройства является длительный вывод установки на режимы. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство регулирования давления установки с несколькими исполнительными органами/ по крайней мере один из котоЕЯЛХ оснащен комбинированным разноскоростным приводом, содержащее физическую; модель установки, блок программного управления, третий выход которого соединен с пневмоприводом первого не полнительного органа, реле, подклю ченноё ко второму выходу блока программного управления, первый регулятор, выход которого подключен к электроприводу первого исполнительного органа и к первому входу блока программного управления, дифференциальный датчик давления, подсоединенный ко входу первого регулятора через замыкающие контакты реле, датчик положение первого исполнительного органа, блок коррекции, первый вход которого связан с датчиком положения, а выход соединен со входом первого регулятора через размыкающиеся контакты реле, датчик давления в модели, второй регулятор, первый вход которого связан с первым выходом блока программного управления, - с йыходом датчика давления в модели, а выход - со входом блока программного управления и приводом второго исполнительного органа и датчик положения второго исполнительного органа, выход которого подключен ко второму входу блока коррекции 2. Недостатками такого устройства являются значительные затраты энергии при последовательном выводе газодинамической установки на заданные режимы, так как в. указанном устройстве пневмопривод используется только при выводе установки на первый из заданных режимов, что приводит к уве личению длительности эксперимента, а, следовательно, повышению энергозатрат. . Цель изобретения - уменьшение (Энергозатрат. Цель достигается тем, что в устройство для регулирования давления в камере газодинамической установки вводятся вычислительный блок, блок расчета положения первого исполнительного органа, а также датчик давл ния в магистрали высокого да-вления, датчик площади Сопла камеры, датчик температуры в магистрали высокого давления и датчик температуры в камере , выходы которых подключены к соответствующим первым входам блока расчета положения первого исполнительного органа, выход которого через второй размыкающий контакт релейного элемента соединен с первым входом первого регулятора, второй вход - с четвертьлм выходом блока про раммного управления, а третий вход с выходом второго датчика положения через первый замыкающий контакт релейного элемента - с первым входом вычислительного блока и через второй замыкающий контакт релейного элемента - со вторым входом второго регулятора, второй вход первого регулятора связан с выходом первого датчика положения, со вторым входом вычис лительного блока непосредственно и с третьим входом вычислительного бло ка - через третий замыкающий контак релейного элемента, выход датчика давления подключен ко второму входу блока программного управления и через третий размыкающий контакт реле ного элемента - к первому входу вто рого регулятора, пе1рвый вход которого через четвертый замыкающий контакт связан с выходом вычислительно го блока. На фиг. 1 представлена структурн схема устройства; на фиг. 2 - схема блока расчета положения первого нополнительного органа, вариант; на фиг. 3 - выполнение схемы вычислител нрго.блока, вариант; на фиг. 4 - ав томатическое выполнение блока программного управления, вариант. Устройство содержит магистраль высокого давления .1, камеру 2 установки с соплом .3, исполнительные ор ганы 4 и 5 с электроприводами 6 и 7 соответственно и пневмоприводом 8 первого исполнительного органа 4, блок программного управления 9, пер вый 10 и второй 11 регуляторы, реле вый элемент 12 с тремя размыкающими контактами 13-15 и четырьмя замыкающими - 16-19, блок 20 расчета положения первого исполнительного органа, вычислительный блок 21, датчики 22 и 23 положения первого и второго исполнительных органов, датчик 24 давления в камере установки, датчик 25 давления в магистрали высокого давления, датчик 26 площади сопла камеры, датчик 27 температуры в магистрали высокого давления и датчик 28 температуры в камере. Блок 20 расчета положения первого исполнительного органа содержит, вычислительный блок 29, первый 30 и второй 31 функциональные преобразователи, инвертор 32; и сумматор 33, причем вычислительный блок 29 состоит из двух блоков деления 34 и 35, блока 36 извлечения квадратного корня и двух блоков умножения 37 и 38. Вычислительный блок 21 содержит усилитель 39, релейный элемент 40 с двумя размыкающими с замедлением контактами 41 и 42, два элемента памяти 43 и 44, четыре функциональных преобразователя 45-48, инвертор 49 и сумматор 50. Блок 9 программного управления содержит шаговый искатель (кольцевой счетчик) 51, управляемый генератором тактовых сигналов 52, два нуль-органа 53 и 54, релейный элемент 55 с двумя замыкающими контактами 56 и 57, блок 58 задержки, элемент сравнения 59, триггер 60 со счетным входом, триггер 61 и клемму 62. Устройство работает следующим обра зом. До начсша реализации первого режима блок 9 программного управления передает сигнал, соответствующий заданному значению д авления в первом режиме, на второй вход блока 20 расчета положения первого исполнительного органу. На первые его входы поступают сигналы с датчиков 25-28 о давлении в магистрали высокого давления (Pg). площади сопла (Е) , температуре в магистрали (Тд) и камере (Т) . На третий вход поступает сигнал (1(1) с датчика 23 положения второго исполнительного органа. Вычислительный блок 29 непрерывно рассчитывает площадь открытия (F), соответствующую установившемуся первому режиму, реализуя формулу где Р - заданное давление в камере 2 в первом режиме. Сигнал с датчика 23 поступает на первый 30 функциональный преобразователь, на выходе которого получают таким образом сигнал F,, соответствующий текущей площади открытия второго исполнительного органа. Посредством сумматора 33 и инвертора 32 вычисляют разность F F - F, плоцадь открытия первого 4 исполнительного органа в первом установившемся режиме, который посредством второго- 31 функционального преобразователя преобразуется в сигнал положения первого исполнител ного органа. Этот сигнал через размыкающий контакт 14 поступает в качестве сигнала.задания на первый вход первого 10 регулятора,который/обраба тывая возникающее рассогласование, устанавливает подвижные упоры перво го 4 исполнительного органа в расчетное положение посредством электр привода б (пневмопривод 8 выключен) При этом сигнал на выходе первого 10регулятора, который поступает на первый вход блока 9 программного уп равления, близкий к нулю и блок 9 вырабатывает на своем втором выходе ,сигнал, соответствующий заданному давлению в первом режиме, который через размыкгиощий контакт 13 поступает на первый вход второго 11 регулятора, а на своем втором выходе блок программного управления 9 вырабатывает сигнал включения пневмопривода 8 первого 4 исполнительного органа. С этого момента начинается реализация очередного режима работы установки. Происходит быстрое открытие первого 4 исполнительного органа до величины, рассчитанной блоком 20 пока поршень пневмопривода не будет прижат к упору. Одновременно второй 11регулятор начинает отрабатывать рассогласование, воздействуя на элек трогфивод 7 втррого 5 исполнительного органа, используя в качестве сигнала обратной связи сигнал с да-тчика 24 давления в камере. Когда установка ныйдзтна заданный режим (давление в камере 2 застабилизировано вблизи заданного значения) блок программно-го управления 9 включает релейный элемент 12. Контакт 14 размыкается, на первый вход первого 10 регулятора подается нулевой сигнал и регулятор 10, отрабатывая возникающее при этом рассогласование закрывает первый ибполнительный орган, воздействуя на его электроприт, вод 6. Одновременно посредством контактов 13 и 19 первый вход второго .11 регулятора отключается от блока .9 программного управления и подключается к выходу вычислительного блок 21, а посредством контактов 15 и 17 второй вход регулятора 11 отключается от датчика 24 давления в камере и подключается к датчику 23 положения второго исполнительного органа. Посредством контактов 16 и 18 вычислительный блок 21 фиксирует положение обоих исполнительных органов в момент срабатывания реле 12 и вычисляет суммарную площадь их открыти Получая информацию об изменении положения первого 4 исполнительного органа, вычислительный блок 21 непре рывно определяет требуемое положение второго 5 исполнительного органа, при котором суммарная площадь открытия двух органов постоянная и равна зафиксированной величине. После срабатывания реле 12 вычислительный блок выступает в качестве задатчика для второго 11 регулятора. Таким образом первый 4 исполнительный орган закрывается, а второй - 5 открывается, причем суммарная их площадь открытия остается постоянной. Когда первый 4 исполнительный орган полностью закрывается, сигнал с выхода первого 10 регулятора вновь близок к нулю и блок программного управления 9 отключает реле 12. При этом второй 11 регулятор опять подключается к блоку nporpciMMHoro управления 9 и датчику 24 давления в камере. Одновременно блок программного управ-. Ленин отключает пневмопривод 8. Перед началом реализации следующего режима блок программного управления 9 выдает на блок 20 расчета положение первого исполнительного органа новое следующее задание по давлению и блок 20, рассчитав новое поло)сение упора первого 4 исполнительного органа, выцает его на первый вход первого 10 регулятора, который посредством электропривода б выведет упор в новое положение. После этого блок 9 вырабатывает сигнал включение пневмопривода В, выдает на второй 11 регулятор задание по давлению и начинается реализация следующего режима работы установки. Вычислительный блок 21 запоминает положение обоих исполнительных органов в момент выхода установки на режим. При этом на первый и третий входы блока 21 поступают сигналы с датчиков 23 и 22 положение второго и первого исполнительных органов соответственно. Эти сигналы через закрытые контакты 41 и 42 поступают на элементы 43 и 44, где запоминаются. Одновременно сигнал с первого входа блока 21 через усилитель 39 поступает на рели 40, которое, спустя время замедления, размыкает контакты 41 и 42. Таким образом элементы памяти 43 и 44 запоминают положения обоих исполнительных органов и поддерживают соответствующие постоянные сигналы на входах первых двух функциональных преобразователей 45 и-46, на выходах которых получаем постоянные сигналы, соответствующие площадям открытия обоих органов. Эти сигналы поступают на первые два входа сумматора 50, на третий вход которого поступает, постоянно изменяющийся;; сигнал, соответствующий текущей площади открытия первого органа, но с противоположным знаком, что достигается посредством последовательного
включения третьего 47 функционального преобразователя, идентичного первому 45, и инвертора 49. Таким образом на выходе сумматора 50 получаем сигнал, соответствующий требуемой площади открытия второго 5 исполнительного органа, при которой суммарная плсвдадь открытия обоих органов равна зафиксированной. Посредством четвертого 48 функционального преобразователя, о.существлякядего обратное преобразование, на выходе блока 21 получаем сигнал требуемого положения второго 5 исполнительного органа.
Блок программного управления 9 работает следующим образом.
Период работы генератора 52 равен времени, отводимому на каждый режим установки. Когда генератор 52 вырабатывает очередной импульс, искатель 51 смещается на одну позицию и устанавливает на своем выходе сигнал очередного задания. Этот сигнал поступает на четвертый выход блока 9 и через блок задержки 58 на замыкающий контакт 56 и первый вход элемента сравнения 59. После того, как упоры первого 4 исполнительного органа установлены, сигнал на первом входе блока 9 близок к нулю, срабатывает первый 53 нуль-орган, который включает релейный элемент 55. При этом через контакт 56 сигнал задания поступает на второй выход блока 9. Контакт 57 соединяет клемму 62 с триггером 60, который перебрасывается в положение i и вырабатывает на третьем выходе блока 9 сигнал включения пневмопривода, а также усО
танавливает в положение
триггер 1, как только установка выходит на текущий, режим сигнал рассогласование на выходе элемента сравнения 59 приближается к нулю и срабатывает второй 54 нуль-орган, который перебрасывает в положение 1 триггер 61, который в свою очередь вырабатывает сигнал включения реле 12 на первом выходе блока 9. Сигнал на первом входе блока 9 отличный от нуля и нуль-орган 53 отключает реле 55 Когда первый 4 исполнительный орган закрывается, сигнал на первом входе блока 9 вновь станет нулевым и нульорган 53 вновь включает реле 55 на втором выходе блока 9 восстанавливается сигнал задания, на триггер 60 со счетным входом приходит очередной импульс, и он устанавливается в состояние О, тО есть На первом выходе блока 9 появляется сигнал отключения реле 12. При отработке следующего режима рабо.ты установки работа блока программного Управления повторяется. Блок задержки 58 установлен для того, чтобы При включении блока 9 сигнал задания
одновременно не появился на его втором и четвертом выходах (величина задержки 0,05-0,1 с).
Таким образом, в устройстве для регулирования давления в камере газодинамической установки предварительная установка упоров одного из исполнительных органов с последующим быстрым открытием посредством пневмопривода используется при выводе установки на каждый режим. Это приводит к уменьшению времени вывода на каждый режим, а, следовательно, к уменьшению энергозатрат на проведение экспериментов на установке.
Сущность предлагаемого устройства не меняется, если установка имеет не два исполнительных органа, а несколько, объединенных в две группы. Кроме того, необязательным является
наличие именно электрического и пневматического приводов. Достаточно иметь два вида разноскоростных приводов или же два исполнительных органа, включенных последовательно с
разноскоростными приводами.
Формула изобретения
Устройство для регулирования давления в камере газодинамической установки, содержащее последовательно соединенные блок программного управления и релейный элемент, а также датчик давления в камере, электроприводы исполнительных органов, входами подключенные к выходам соответствующих регуляторов, а выходами - ко входам соответствующих датчиков положения, причем выход первого регулятора соединен с первым входом блока программного управления, второй выход которого через первый размыкающий контакт релейного элемента связан с первым входом второго регулятора, а третий выход - со входом пневмопривода первого исполнительного органа, отличающееся тем, что, с целью уменьшения энергозатрат, оно содержит вычислительный блок, блок расчета положения первого исполнительного органа, а также датчик давления в магистрали высокого давления, датчик площади сопла камеры, датчик темпера туры в магистрали высокого давления и датчик температуры в камере, выходы которых подключены к соответствукицим первым входам блока расчета положения первого исполнительного органа, выход которого через второй размыкающий
контакт релейного элемента соединен с первым входом первого регулятора, второй вход - с четвертым выходом блока программного управления, а третий вход - с выходом второго датчика положения, через первый замыкающий контакт релейного элемента - с первым входом вычислительного блока и через второй замыкающий контакт релейного элемента - со вторым входом второго регулятора, вторюй. вход первого регулятора связан с выходом 5 первого датчика положения,со вторым входом вычислительного блока непосредственно и с третьим входом вычислительнрго блока - через третий замыкающий контакт релейного элемента, 10 выход датчика давления подключен ко второму входу блока программного управления и через третий размыкающий контакт релейного элемента - к первому входу Второго регулятора, первый вход соторого через четвертый замыкающий контакт связан с выходом вычислительного блока.
Источники информации, принятые во внимание при экспертизе t 1. Авторское свидетельство СССР I 102913, кл. G 05 В 11/00, 1970.
2. Авторское свидетельство СССР 327453, кл. G 05 D 16/20, G 05 В 11/32, 1972 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080115A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| Система автоматического регулирования процессов горения в группе нагревательных печей периодического действия | 1990 |
|
SU1788422A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| Устройство для управления электроприводным компрессором | 1982 |
|
SU1092297A1 |
| Устройство для регулирования многопараметрического объекта | 1975 |
|
SU1080116A1 |
| Система управления | 1978 |
|
SU742870A1 |
| УСТРОЙСТВО для СВЯЗАННОГО РЕГУЛИРОВАНИЯ ПО ДВУМ ПЕРЕМЕННЫЛ1 | 1967 |
|
SU192883A1 |
| Устройство для регулирования температуры расплава в смесителях | 1987 |
|
SU1474614A1 |
| Устройство для защиты от помпажа компрессора | 1988 |
|
SU1663238A1 |
Г
L
7Л
I
Фиг.1
1
