элемента ИЛИ, выход которого подключен к второму релейному элементу, а информационный выход контактора
исполнительного органа через третий элемент НЕ подключен к второму входу шестого элемента ИЛИ.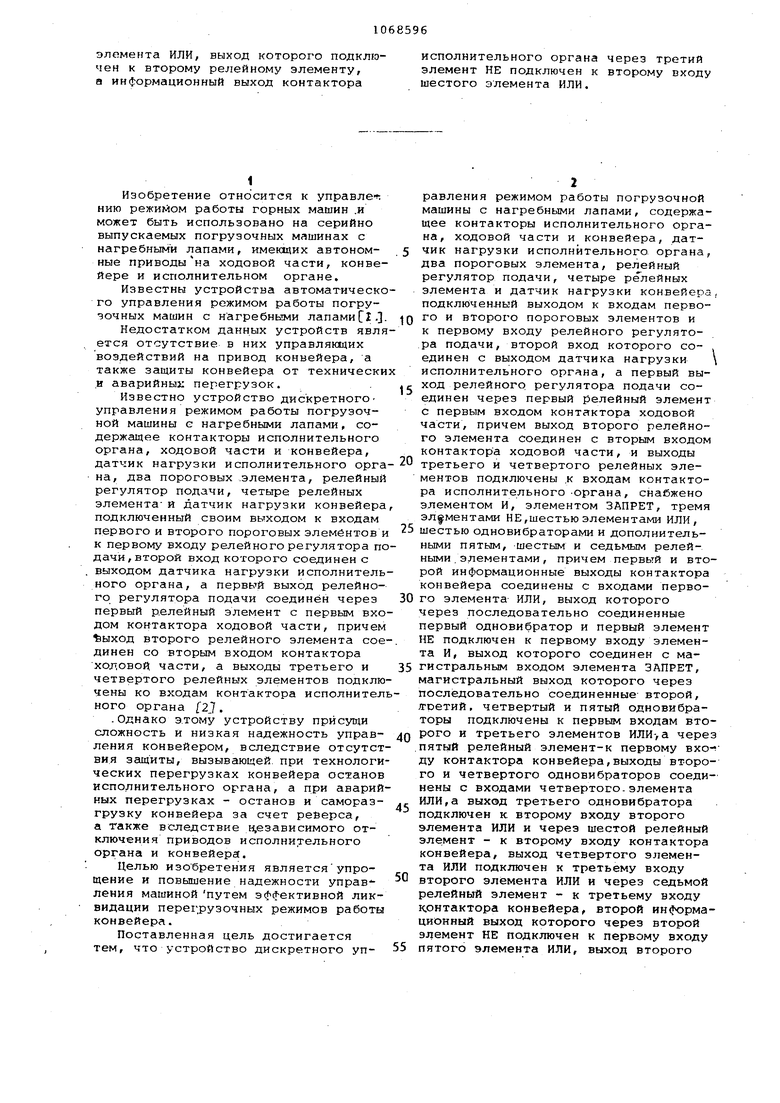
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство сигнализации о режимахРАбОТы гОРНОй пОгРузОчНый МАшиНы | 1979 |
|
SU840350A1 |
| Устройство аврийного отключения при обрыве или стопорении цепи конвейера | 1979 |
|
SU875029A1 |
| Способ автоматического управления режимом работы погрузочной машины с барабанно-лопастным исполнительным органом | 1979 |
|
SU866236A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |
| Способ автоматического управлениягОРНОй МАшиНОй | 1978 |
|
SU810963A1 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Способ управления горной машиной и устройство для его осуществления | 1983 |
|
SU1105640A1 |
| Устройство управления электромагнитной муфтой привода горной машины | 1984 |
|
SU1190027A1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ | 1988 |
|
RU2041353C1 |
УСТРОЙСТВО ДИСКРЕТНОГО УПР/ ВЛЕНКЯ РЕГИМОМ РАБОТЫ ПОГРУЗОЧНОЙ МАШИНЫ С НАРРЕБНЬВДИ ЛАПАМИ, содержащее контакторы исполнительного органа, ходовой части и конвейера, датчик нагрузки исполнительного органа, два пороговых элемента, релейный регулятор подачи, четыре релейных элемента и датчик нагрузки конвейера, подключенный выходом к входам первого и второго пороговых элементов и к первому входу релейного регулятора подачи, второй вход которого соединен с выходом датчика нагрузки исполнительного органа, а первый выход релейного регулятора подачи соединен через первый релейный элемент с первым входом .контактора ходовой части, причем выход второго релейного элемента соединен с вторым входом контактора ходовой части, а выходы третьего и четвертого релейных элементов подключены к входам контактора исполнительного органа, отличающееся тем, что, о целью упрощения и повышения надежности управления путем эффективной ликвидации перегрузочных режимов работы конвейера, оно снабжено элементом И, Злемектом ЗАПРЕТ, тремя элементами НЕ, шестью элементами ИЛИ, шестью одновибраторами и дополнительными пятым, шестым и седьмым релейными элементами, -причем первый и второй информационные выходы контактора конвейера соединены с входами первого Элемента ИЛИ, выход которого через последовательно соединенные первый одновибратор и первый элемент НЕ подключен к первому входу элемента И, выход которого соединен с магистральным входом .элемента ЗАПРЕТ, магистральный выход которого через последовательно соединенные второй, третий, четвертый н пятый одновибраторы подклю |ены к первым входам второго и третьего элементов ИЛИ, а через пяi тый релейный элемент - к первому входу контактора конвейера, выходы (/) второго и четвертого одновибраторов соединены с входами четвертого элемента ИЛИ, а выход третьего одновибратора подключен к второму входу ВТОРОГО элемента ИЛИ и через шестой релейный элемент - к второму входу контактора конвейера, выход четвертого элемента ИЛИ подключен к третье,о: му входу второго элемента ИЛИ и череэ седьмой релейный элемент - к оо третьему входу контактора конвейера,. СП второй информационный выход которого череэ второй элемент НЕ подключен к со первому входу пятого элемента ИЛИ, 05 выходвторого элемента ИЛИ соединен с управляющим входом элемента ЗАПРЕТ, и с вторым входом пятого элемента ИЛИ, нлход которого соединен с четйертым релейным элементом, при этом первый пороговый элемент соединен с вторым входом элемента И, а второй пороговый элемент - с третьим входом пятого элемента ИЛИ и с вторым входом третьего элемента ИЛИ, выход которого через шестой одновибратор соединен с ТретьиМ релейным элементом, выход релейного регулятора подачи соединен с первым входом шестого
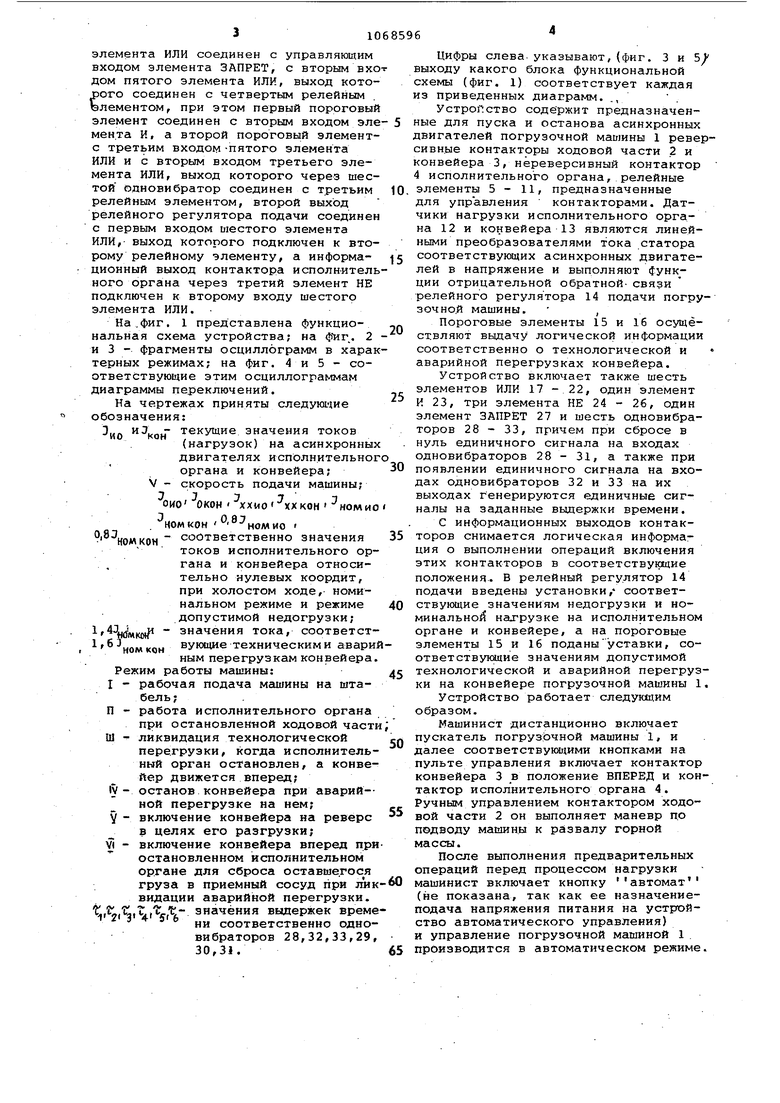
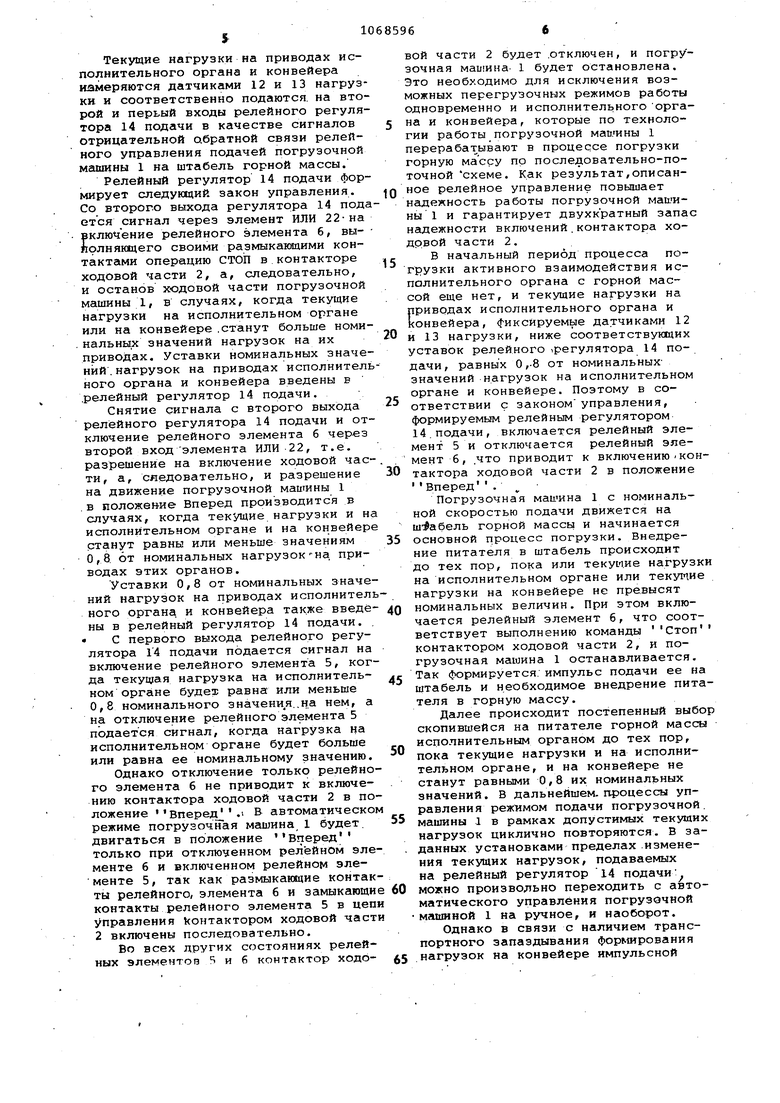
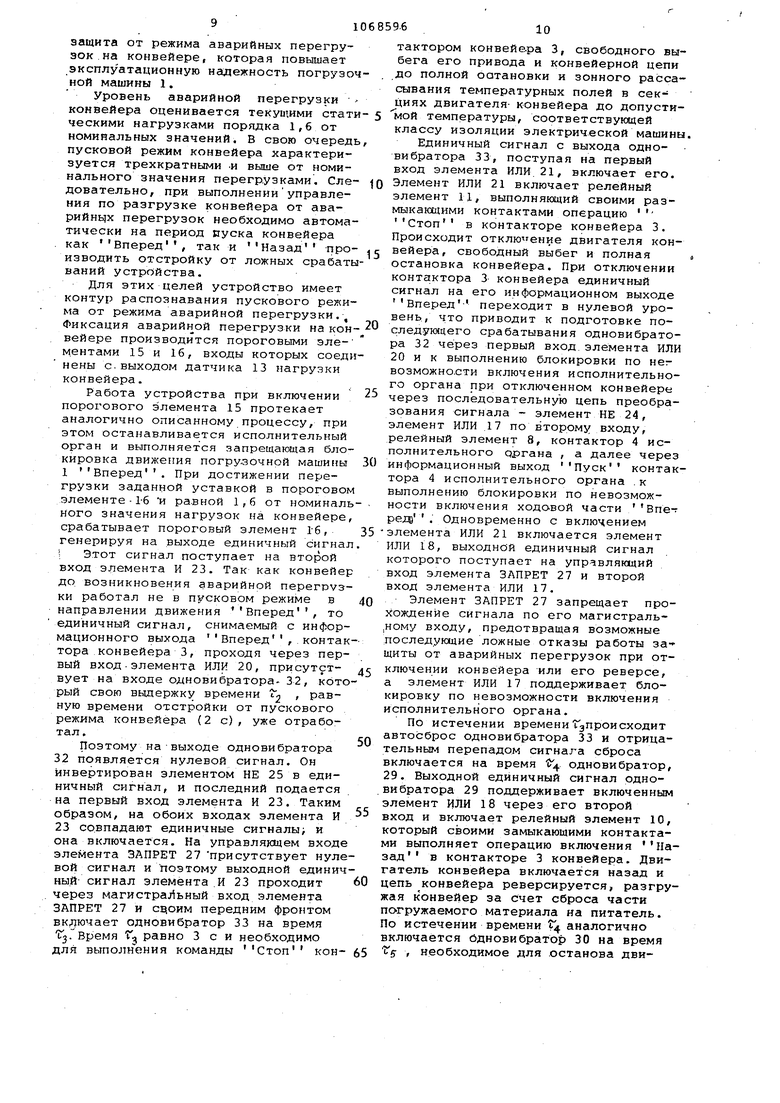
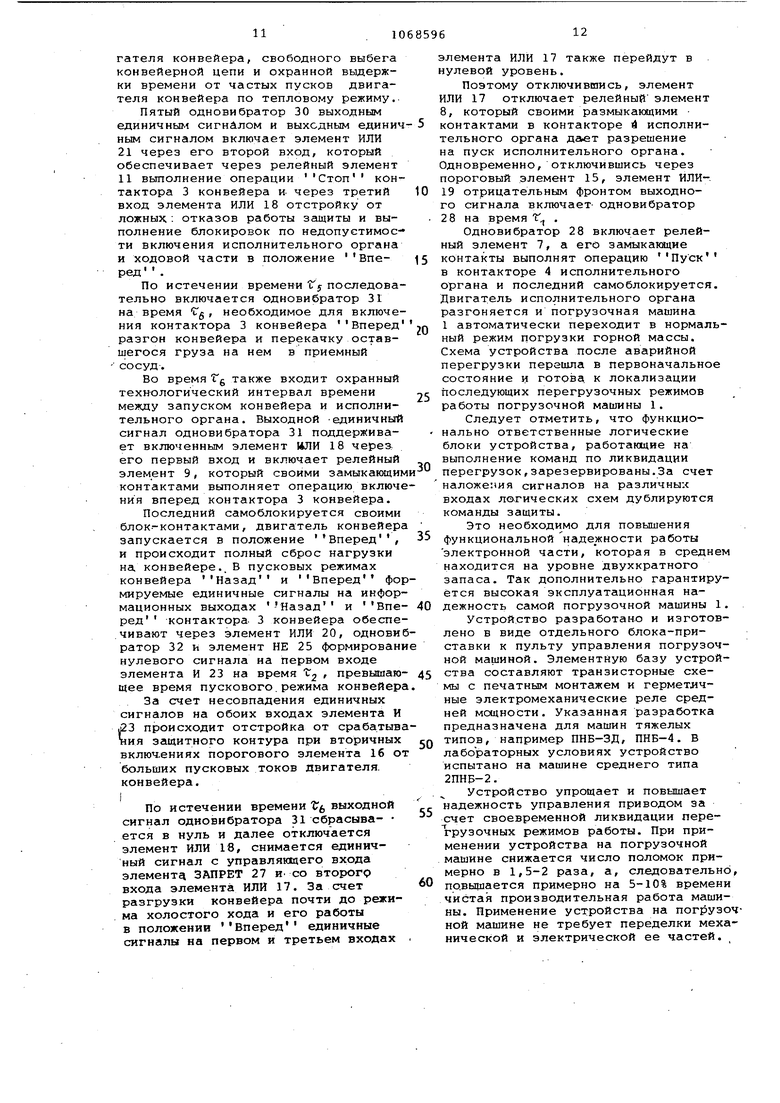
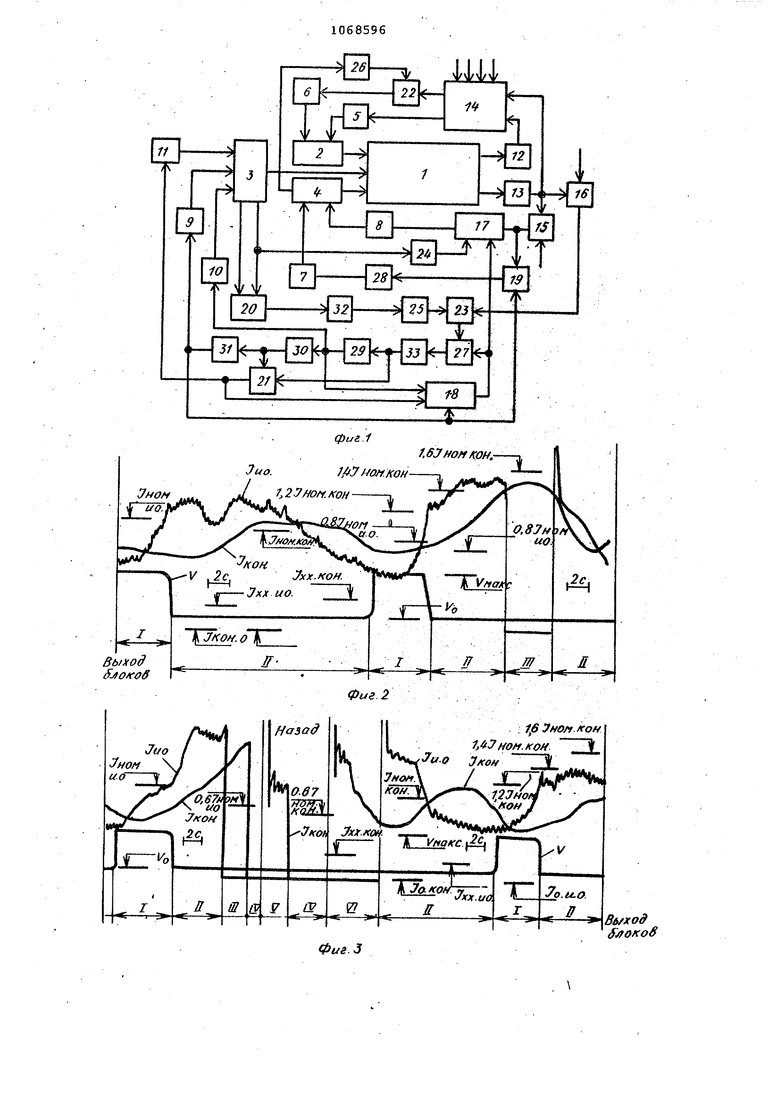
Изобретение относится к управлению режимом работы горных машин .и может быть использовано на серийно выпускаемых погрузочных машинах с нагребными лапами, имеквдих автономные приводына ходовой части, конвейере и исполнительном органе. Известны устройства автоматическо го управления режимом работы погрузочных машин с нагребными лапамиfl.. Недостатком данных устройств явля ется отсутствие в них управляющих воздействий на привод конвейера, а также защиты конвейера от технически и аварийных перегрузок. Известно устройство дискретногоуправления режимом работы погрузочной машины с нагребными лапами, содержащее контакторы исполнительного органа, ходовой части и конвейера, датчик нагрузки исполнительного орга на, два пороговых .элемента, релейный регулятор подачи, четыре релейных элемента и датчик нагрузки конвейера подключенный своим выходом к входам первого и второго пороговых элементов и к первому входу релейного регулятора по дачи, второй вход которого соединен с выходом датчика нагрузки исполнитель ного органа, а первый выход релейного регулятора подачи соединён через первый релейный элемент с первым вхо дом контактора ходовой части, причем Ьыход второго релейного элемента сое динен со вторым входом контактора холовой части, а выходы третьего и четвертого релейных элементов подклю чены ко входам контактора исполнител ного органа 2 . -Однако этому устройству прйсу1т1И сложность и низкая надежность управления конвейером, вследствие отсутст вия защиты, вызывающей при технологи ческих перегрузках конвейера останов исполнительного органа, а при аварий ных перегрузках - останов и саморазгрузку конвейера за счет реверса, а также вследствие н,езависимого отключения приводов исполнительного органа и конвейера. Целью изобретения являетсяупрощение и повышение надежности управления машиной путем эффективной ликвидации перегрузочных режимов работы конвейера. Поставленная цель достигается тем, что устройство дискретного управления режимом работы погрузочной машины с нагребными лапами, содержащее контакторы исполнительного органа, ходовой части и конвейера, датчик нагрузки исполнительного органа, два пороговых элемента, релейный регулятор подачи, четыре релейных элемента и датчик нагрузки конвейера, подключенный выходом к входам первого и второго пороговых элементов и к первому входу релейного регулятора подачи, второй вход которого со- . единен с выходом датчика нагрузки исполнительного органа, а первый выход релейного регулятора подачи соединен через первый релейный элемент с первым входом контактора ходовой части, причем выход второго релейного элемента соединен с вторым входом контактора ходовой части, и выходы третьего и четвертого релейных элементов подключены .к входам контактора исполнительного -органа, снабжено элементом И, элементом ЗАПРЕТ, тремя элементами НЕ,шестью элементами ИЛИ, шестью одновибраторами и дополнительными пятым, -шестым и седьмым релейными .элементами, причем первый и второй информационные выходы контактора конвейера соединены с входами первого элемента ИЛИ, выход которого через последовательно соединенные первый одновибратор и первый элемент НЕ подключен к первому входу элемента И, выход которого соединен с магистральньзм входом элемента ЗАПРЕТ, магистральный выход которого через последовательно соединенные второй, я-ретий, четвертый и пятый одновибраторы подключены к первым входам второго и третьего элементов ИЛИ-, а через пятый релейный элемент-к первому контактора конвейера,выходы второго и четвертого одновибраторов соединены с входами четвертого-элемента ИЛИ,а выход третьего одновибратора подключен к второму входу второго элемента ИЛИ и через шестой релейный элемент - к второму входу контактора конвейера, выход четвертого элемента ИЛИ подключен к третьему входу второго элемента ИЛИ и через седьмой релейный элемент - к третьему входу контактора конвейера, второй ин(юрмационный выход которого через второй элемент НЕ подключен к первому входу пятого элемента ИЛИ, выход второго элемента ИЛИ соединен с управляющим входом элемента ЗАПРЕТ, с вторым вхо дом пятого элемента ИЛИ, выход которого соединен с четвертым релейНЕлм элементом, при этом первый пороговый элемент соединен с вторым входом эле мента И, а второй пороговый элементс третьим входом -пятого элемента ИЛИ и с вторым входом третьего элемента ИЛИ, выход которого через шестой одновибратор соединен с третьим релейным элементом, второй выход релейного регулятора подачи соединен с первым входом шестого элемента ИЛИ,- выход которого подключен к второму релейному элементу, а информационный выход контактора исполн-итель ного органа через третий элемент НЕ подключен к второму входу шестого элемента ИЛИ. На .фиг. 1 представлена функциональная схема устройства; на Фиг.. 2 и 3 - фрагменты осциллограмм в харак терных режимах; на фиг. 4 и 5 - соответствующие этим осциллограммам диаграммы переключений. На чертежах приняты следующие обозначения: 3„л иЭ.,„- текущие значения токов пО КОН ,. (нагрузок) на асинхронных двигателях исполнительног органа и конвейера; V - скорость подачи машины; ОКО окон xxnof xxкон номио номкон номио номкон соответственно значения токов исполнительного органа и конвейера относительно нулевых коордит, при холостом ходе,- номинальном режиме и режиме допустимой недогрузки; значения тока, соответст «Mirnu вующие техническими авари ным перегрузкам конвейера Режим работы машины: I - рабочая подача машины на штабель;П - работа исполнительного органа при остановленной ходовой част Ш - ликвидация технологической перегрузки, когда исполнительный орган остановлен, а конвейер движется вперед; 1у - останов конвейера при аварий-ной перегрузке на нем; у - включение конвейера на реверс в целях его разгрузки; vi - включение конвейера вперед при остановленном исполнительном органе для сброса оставшегося груза в приемный сосуд при лик видации аварийной перегрузки. tl,,t,,ir,.t- значения выдержек време 1 Z 5 4 S 6 соответственно одновибраторов 28,32,33,29 30,31. Цифры слева, указывают,(фиг. 3 и 5/ выходу какого блока функциональной схемы (фиг. 1) соответствует каждая з приведенных диаграмм. ., Устройство содержит предназначенные для пуска и останова асинхронных вигателей погрузочной машины 1 реверсивные контакторы ходовой части 2 и конвейера 3, нереверсивный контактор 4 исполнительного органа, релейные элементы 5 - 11, предназначенные для управления контакторами. Датчики нагрузки исполнительного органа 12 и конвейера 13 являются линейными преобразователями тока статора соответствукядих асинхронных двигателей в напряжение и выполняют функции отрицательной обратной- связи релейного регулятора 14 подачи погрузочно.й машины. , Пороговые элементы 15 и 16 осуществляют выдачу логической информации соответственно о технологической и « аварийной перегрузках конвейера. Устройство включает также шесть элементов ИЛИ 17 - 22, один элемент И 23, три элемента НЕ 24 - 26, один элемент ЗАПРЁТ 27 и шесть одновибраторов 28 - 33, причем при сбросе в нуль единичного сигнала на входах одновибраторов 28 - 31, а также при появлении единичного сигнала на входах одновибраторов 32 и 33 на их выходах генерируются единичные сигналы на заданные выдержки времени. С информационных выходов контакторов снимается логическая информация о выполнении операций включения этих контакторов в соответствующие положения.. В релейный регулятор 14 подачи введены установки,- соответствующие значениям недогрузки и номинальной нагрузке на исполнительном органе и конвейере, а на пороговые элементы 15 и 16 поданыуставки, соответствующие значениям допустимой технологической и аварийной перегрузки на конвейере погрузочной машины 1. Устройство работает следующим образом. Машинист дистанционно включает пускатель погрузочной машины 1, и далее соответствукяцими кнопками на пульте управления включает контактор конвейера 3 в положение ВПЕРЕД и контактор исполнительного органа 4. Ручным управлением контактором ходовой части 2 он выполняет маневр по подводу машины к развалу горной массы. После выполнения предварительных операций перед процессом нагрузки машинист включает кнопку автомат (не показана, так как ее назначениеподача напряжения питания на устройство автоматического управления) и управление погрузочной машиной 1. производится в автоматическом режиме.
Текущие нагрузки на приводах исполнительного органа и конвейера намеряются датчиками 12 и 13 нагрузки и соответственно подаются, на второй и перьый входы релейного регулятора 14 подачи в качестве сигналов отрицательной обратной связи релейного управления подачей погрузочной машины 1 на штабель горной массы.
Релейный регулятор 14 подачи формирует следугаций закон управления. Со второго выхода регулятора 14 подается сигнал через элемент ИЛИ 22- на включение релейного элемента 6, вы- волняющего своими размыкающими контактами операцию СТОП в контакторе ходовой части 2, а, следовательно, и останов ходовой части погрузочной машины 1, в случаях, когда текущие нагрузки на исполнительном органе или на конвейере .станут больше номинальных значений нагрузок на их приводах. Уставки номинальных значений, нагрузок на приводах исполнительного органа и конвейера введены в .релейный регулятор 14 подачи.
Снятие сигнала с второго выхода релейного регулятора 14 подачи и отключение релейного элемента 6 через второй входэлемента ИЛИ 22, т.е. разрешение на включение ходовой час-. ти, а, следовательно, и разрешение на движение погрузочной машины 1 в положен-ие Вперед производится в случаях, когда текущие нагрузки и на исполнительном органе и на конвейере станут равны или меньше значениям 0,8. 6т номинальных нагрузок-на. приводах этих органов.
Уставки 0,8 от номинальных значений нагрузок на приводах исполнительного органа, и конвейера также введены в релейный регулятор 14 подачи. .
С первого выхода релейного регулятора 14 подачи подается сигнал на включение релейного элемента 5, когда текущая нагрузка на исполнительном органе будет равна или меньше
0,8 номинального значени.я.,на нем, а на отключение релейного элемента 5 подается сигнал, когда нагрузка на исполнительном органе будет больше или равна ее номинальному значению.
Однако отключение только релейного элемента 6 не приводит к вк.пючению контактора ходовой части 2 в положение Вперед. В автоматическом режиме погрузочная машина 1 будет, двигаться в положение Вперед только при отключенном релейном элементе 6 и включенном релейном элементе 5, так как размыкающие контакты релейного, элемента 6 и замыкающие контакты релейного элемента 5 в цепи управления Контактором ходовой части 2 включены последовательно.
Во всех других состояниях релейных элементов S и 6 контактор ходовой части 2 будет .отключен, и погрузочная машина. 1 будет остановлена. Это необходимо для исключения возможных перегрузочных режимов работы одновременно и исполнительного органа и конвейера, которые по технологии работы погрузочной машины 1 перерабатывают в процессе погрузки горную массу по последовательно-поточной схеме. Как результат,описанное релейное управление повышает
0 надежность работы погрузочной машины 1 и гарантирует двухкратный запас надежности включений.контактора ходрвой части 2.
В начальный период процесса погрузки активного взаимодействия исполнительного органа с горной массой еще нет, и текущие нагрузки на приводах исполнительного органа и конвейера, фиксируемые датчиками 12 и 13 нагрузки, ниже соответствующих уставок релейного регулятора 14 подачи, равных О ,-8 от номинальныхзначений нагрузок на исполнительном органе и конвейере. Поэтому в со5ответствии с закономуправления, формируемым релейным регулятором 14.подачи, включается релейный элемент 5 и отключается релейный элемент 6 , .что приводит к включению кон0тактора ходовой части 2 в положение Вперед .
Погрузочная машина 1 с номинальной скоростью подачи движется на Ш:#абель горной массы и начинается основной процесс погрузки. Внедрение питателя в штабель происходит до тех пор, пока или текущие нагрузки на исполнительном органе или текущие нагрузки на конвейере не превысят номинальных величин. При этом включается релейный элемент 6, что соответствует выполнению команды Стоп контактором ходовой части 2, и погрузочная машина 1 останавливается. Так формируется, импульс подачи ее на штабель и необходимое внедрение питателя в горную массу.
Далее происходит постепенный выбор скопившейся на питателе горной массы исполнительным органом до тех пор,
0 пока текущие нагрузки и на исполнительном органе, и на конвейере не станут равными 0,8 их номинальных значений. В дальнейшем, процессы управления режимом подачи погрузочной,
5 машины 1 в рамках допустимых текущих нагрузок циклично повторяются. В заданных установками пределах .изменения текущих нагрузок, подаваемых на релейный регулятор 14 подачи
0 можно произвольно переходить с автоматического управления погрузочной машиной 1 на ручное, и наоборот.
Однако в связи с наличием транспортного запаздывания формирования нагрузок на конвейере импульсной
5 подачей погрузочной маишны 1 на пта бель, обладагаций нестационарными свойствами, и в связи с интегрирова нием объема материала по несушей поверхности конвейера возможны (при выборе иcпoлниteльным органом погру жаемой массы с питателя) технологические, перегрузки конвейера и его привета, ко торые могут привести к чрезмерному износу механической час ти. Управление на ликвидацию техноло гических перегрузок -по конвейеру производится включением порогового элемента 15, настроенного на уставку, равную 1,4 номинального значени нагрузки конвейера. В этом случае с выхода порогового элемента 15 подается единичный сигнал на третий вход элемента ИЛИ 17 и на второй вход элемента КЛИ 19. Эти элементы ИЛИ (формируют на своих выходах единичные сигналы, причем элемент ИЛИ -17 включает релейный элемент. 8, раз мыкающий контакт которого отключает контактор исполнительного органа 4, выполняя команду Стоп;, а элемен ИЛИ 19 подготавливает к срабатывани одновибратор 28, который включается .от сброса входного единичного сигна ла в нулевой уровень. Происходит останов двигателя исполнительного органа и самого исполнительного органа, и прекращение поступления груза на работающий конвейер, а, следовательно, и постепенная разгрузка последнего от оставшегося объема груза. При отключении контактора исполнительного органа 4 на его информационном выходе Пуск единичный сигнал, поданный на вход элемента ПЕ 26, перебрасывается в нулевой уровень,. С выхода элемента НЕ 26 снимается единичный сигнал, поступающий на первый вход элемента ИЛИ 22, и удерживающий ее во включенном состоянии. Элемент ИЛИ 22 поддерживает во включенном состоянии релейный элемент 6. Таким образом, выполняется блокировка о невозможности включени ходовой части погрузочной машины 1 в положение Вперед при остановленном исполнительном органе. Разгрузка конвейера до уровня ни же допустимой технологической перегрузки приводит к отключению порого вого элемента 15, сбросу в нуль единичных сигналов на выходах элеме тов ИЛИ 17 и 19, отключению релейно го элемента 8, снятию команды СТОП в контакторе исполнительного органа 4 и срабатыванию одновибратора 28. Последний;срабатывая на время Т равное 0,5 с, включает релейный, .эл мент 7, который своими замыкающими .контактами выполняет операцию Пус контактора исполнительного органа 4. В течение времениТ.контактор исполнительного органа 4 включается и своими блок-контактами самоблокируется. Происходит разгон двигателя исполнит.ель-ного органа 4, одновременно на информационном в{лходе контактора исполнительного органа Форми руется единичный сигнал, приводящий к обра-тным переключениям сигналов в последовательной цепи: элемент НЕ 26, элемент ИЛИ 22 через первый вход, релейный элемент 6, и соответственно к снятию команды Стоп контактора ходовой части 2. Указанная блокировка снимается. Таким образом, локализуется недопустимая технологическая перегрузка на конвейере и устройство обеспечивает нормальную работу погрузочной машины 1 в автоматическом режиме. При этом эксплуатационная надежность конвейера повышается, как повышается и функциональная надежность всего объекта управления - погрузочной машины 1. При работе погрузочной машины 1 на штабеле с грузом, имеющим негабаритные фракции, склонным к образованию зависающих карнизов н к обрушению их, возможны заклинивание и .заштыбовка конвейера, при которых текущие нагрузки на нем доходят до аварийных значений. В данных ситуациях необходимо остановить исполнительный орган и конвейер, произвести кратковременный реверс конвейера и за счет протяжки конвейерной цепи в положение Назад разгрузить его или вывести из заклинивания, а далее вторично произвести реверс, обеспечив работы погрузочной машины 1 в нормальном, режиме погрузки. Указанные разгрузочные операции выполняются на.неавтоматизированной машине машинистом с помощью ручного управления и должны способствовать повышению надежности работы конвейера. Однако на неавтоматизированной машине при ручном управлении, должное повышение надежности конвейера не достигается. Это обусловлено тем, что программа разгрузочных операций задается машинистом, который не имеет количественных оценок нагрузо.к. В связи с субъективизмом оценок возникают значительные неточности в выполнении программы разгрузочных операций. В предложенном устройстве разгрузочные операции выполняютс.я автоматически. Автоматическое управление исключает указанные недостатки и освобождает человека от процесса управления по разгрузке конвейера,давая ему возможность более качественно выполнять, другие обязанности. Для этой цели в устройстве реализована защита от режима аварийных перегрузок на конвейере, которая повышает эксплуатационную надежность погруэо ной машины 1. Уровень аварийной перегрузки конвейера оценивается текущими стат ческими нагрузками порядка 1,6 от номинальных значений. В свою очеред пусковой режим конвейера характеризуется трехкратными -и выше от номинального значения перегрузками. Сле довательно, при выполненииуправления по разгрузке конвейера от аварийных перегрузок необходимо автома тически на период пуска конвейера как Вперед, так и Назад про изводить отстройку от ложных срабаты ваний устройства. Для этих целей устройство имеет контур распознавания пускового режима от режима аварийной перегрузки.. Фиксация аварийной перегрузки на кон вейере производится пороговыми элементами 15 и 16, входы которых соед нены с.выходом датчика 13 нагрузки конвейера. Работа устройства при включении порогового элемента 15 протекает аналогично описанному процессу, при этом останавливается исполнительный орган и выполняется запрещакадая блокировка движения погру-зочной машины 1 Вперед. При достижении перегрузки заданной уставкой в пороговом элементе 1-6 и равной 1,6 от номиналь ного значения нагрузок на конвейере срабатывает пороговый элемент 16, генерируя на выходе единичный сигнал Этот сигнал поступает на второй вход элемента И 23. Так как конвейер до возникновения аварийной перегруз ки работал не в пусковом режиме в направлении движения Вперед, то единичный сигнал, снимаемый с информационного выхода Вперед, контак тора конвейера 3, проходя через первый вход.элемента ИЛИ 20, присутствует на входе одновибратора- 32, кото рый свою выдержку времени tj , равную времени отстройки от пускового режима конвейера (2 с), уже отработал . Поэтому на выходе одновибратора 32 появляется нулевой сигнал. Он инвертирован элементом НЕ 25 в единичный сигнал, и последний подается на первый вход элемента И 23. Таким образом, на обоих входах элемента И 23 совпадают единичные сигналы; и она включается. На управляющем входе элемента ЗАПРЕТ 27 присутствует нуле вой сигнал и поэтому выходной единич ный- сигнал элемента .И 23 проходит через магистральный вход элемента ЗАПРЕТ 27 и сцоим передним фронтом включает одновибратор 33 на время fj. Время Г-, равно 3 с и необходимо для выполн ения команды Стоп контактором конвейера 3, свободного выбега его привода и конвейерной цепи до полной остановки и зонного рассасывания температурных полей в секциях двигателя- конвейера до допусти мой температуры, соответствующей классу изоляции электрической машины. Единичный сигнал с выхода одновибратора 33, поступая на первый вход элемента ИЛИ 21, включает его. Элемент ИЛИ 21 включает релейный элемент 11, выполнякщий своими размыкающими контактами операцию Стоп в контакторе конвейера 3. Происходит отклю ение двигателя конвейера, свободный выбег и полная j остановка конвейера. При отключении контактора 3 конвейера единичный сигнал на его информационном выходе Вперед- переходит в нулевой уровень, что приводит к подготовке последующего срабатывания одновибратора 32 через первый вход элемента ИЛИ 20 и к выполнению блокировки по нег возможно.сти включения исполнительного органа при отключенном конвейере через последовательную цепь преобразования сигнала - элемент НЕ 24, элемент ИЛИ 17 по второму входу, релейный элемент 8, контактор 4 исполнительного органа , а далее через информационный выход Пуск контактора 4 исполнительного органа .к выполнению блокировки по невозможности включения ходовой части ВпеОдновременно с включением элемента ИЛИ 21 включается элемент ИЛИ 18, ВЫХОДНОЙ единичный сигнал которого поступает на управляющий вход элемента ЗАПРЕТ 27 и второй вход элемента ИЛИ 17. Элемент ЗАПРЕТ 27 запрещает прохождение сигнала по его магистраль|НОму входу, предотвращая возможные последукхцие ложные отказы работы за-щиты от аварийных перегрузок при отключении конвейера или его реверсе/ а элемент ИЛИ 17 поддерживает блокировку по невозможности включения исполнительного органа. По истечении времени зпроисходит автосброс одновибратора 33 и отрицательным перепадом сигнага сброса включается на время одновибратор, 29. Выходной единичный сигнал одновибратора 29 поддерживает включенным элемент ИЛИ 18 через его второй вход и включает релейный элемент 10, который своими замыкающими контактами выполняет операцию включения зад в контакторе 3 конвейера. Двигатель конвейера включается назад и цепь конвейера реверсируется, разгружая конвейер за счет сброса части погружаемого материала на питатель. По истечении времени 4 аналогично включается йдновибратор 30 на время необходимое для останова двигателя конвейера, свободного выбега конвейерной цепи и охранной выдержки времени от частых пусков двигателя конвейера по тепловому режиму. Пятый одновибратор 30 выходным единичным сигналом и выходным единич ным сигналом включает элемент ИЛИ 21 через его второй вход, который обеспечивает через релейный элемент 11 выполнение операции Стоп контактора 3 конвейера и через третий вход элемента ИЛИ 18 отстройку от ложных . отказов работы защиты и выполнение блокировок по недопустимоети включения исполнительного органа и ходовой части в положение Вперед. По истечении времени fy последовательно включается одновибратор 31 на время Cg, необходимое для включения контактора 3 конвейера Вперед разгон конвейера и перекачку оставшегося груза на нем в приемный сосуд. Во время Tg также входит охранный технологический интервал времени между запуском конвейера и исполнительного органа. Выходной единичный сигнал одновибратора 31 поддерживает включенным элемент ИЛИ 18 череа его первый вход и включает релейный элемент 9, который своими замыкающим контактами выполняет операцию включе ния вперед контактора 3 конвейера. Последний самоблокируется своими блок-контактами, двигатель конвейера запускается в положение Вперед, и происходит полный сброс нагрузки на. конвейере.. В пусковых режимах конвейера Назад и Вперед фор мируемые единичные сигналы на информационных выходах -Назад и Вперед контактора 3 конвейера обеспечивают через элемент ИЛИ 20, однови ратор 32 и элемент НЕ 25 формировани нулевого сигнала на первом входе элемента И 23 на время 1Г2 , превышающее время пускового.режима конвейера За счет несовпадения единичных сигналов на обоих входах элемента И у23 происходит отстройка от срабатыва 1НИЯ защитного контура при вторичных включ-ениях порогового элемента 16 от больших пусковых токов двигателя, конвейера. По истечении времени Cf, выходной сигнал одновибратора 31 сбрасыва- ется в нуль и далее отключается элемент ИЛИ 18, снимается единичный сигнал с управлягацего входа элементу ЗАПРЕТ 27 и. со второго входа элемента ИЛИ 17. За счет разгрузки конвейера почти до режима холостого хода и его работы в положений Вперед единичные сигналы на первом и третьем входах элемента ИЛИ 17 также перейдут в нулевой уровень. Поэтому отключившись, элемент ИЛИ 17 отключает релейный элемент 8, который своими размыкающими контактами в контакторе и исполнительного органа дает разрешение на пуск исполнительного органа. Одновременно, отключившись через пороговый элемент 15, элемент ИЛИ-. 19 отрицательным фронтом выходного сигнала вк.лючает- одновибратор 28 на время f . Одновибратор 28 включает релейный элемент 7, а его замыкающие контакты выполнят операцию Пуск в контакторе 4 исполнительного органа и последний самоблокируется. Двигатель испо.лнительного органа разгоняется и погрузочная машина 1 автоматически переходит в нормальный режим погрузки горной массы. Схема устройства после аварийной перегрузки перешла в первоначальное состояние и готова, к локализации последующих перегрузочных режимов работы погрузочной машины 1. Следует отметить, что функционально ответственные логические блоки устройства, работающие на выполнение команд по ликвидации перегрузок,зарезервированы.За счет наложения сигналов на различных входах логических схем дублируются команды защиты. Это необходи мо для повышения функциональной надежности работы электронной части, которая в среднем находится на уровне двухкратного запаса. Так дополнительно гарантируется высокая эксплуатационная надежность самой погрузочной машины 1. Устройство разработано и изготовлено в виде отдельного блока-приставки к пульту управления погрузочной машиной. Элементную базу устройства составляют транзисторные схемы с печатным монтажем и герметлчные электромеханические реле средней мощности. Указанная разработка предназначена для машин тяжелых типов, например ПНВ-ЗД, ПИВ-4. В лабораторных условиях устройство испытано на машине среднего типа 2ПНБ-2. Устройство упрощает и повышает надежность управления приводом за счет своевременной ликвидации переЪрузочных режимов работы. При применении устройства на погрузочной машине снижается число поломок примерно в 1,5-2 раза, а, следовательно, повышается примерно на 5-10% времени чистая производительная работа машины. Применение устройства на погрузочной машине не требует переделки механической и электрической ее частей. Выход f OJfoS
фиг 3
Фиг. 2 . ; iftyHOfi.KoH Ъ УHOff.ifoH fO С7 Вб/ход
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство автоматического управления горной погрузочной машиной с нагребными лапами | 1978 |
|
SU875028A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство автоматического управления режимом работы погрузочной машины с нагребными лапами | 1976 |
|
SU654799A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| . | |||
