ориентирующим и управляющим «ходами и выходными кодовыми шинами, подключенными к входным кодовьш шинам дешифратора, выход которого подсоединен к первому входу первого триггера, вторым входом подключенного к выходу формирователя импульсов, выход первого триггера подключен к первому входу логического элемента И, выход которого соединен с первым входом логического элемента ИЛИ, соединенного выходом с управ- лякнцим входом шинного фо1я шрователя ориентирующий вход которого подключен к выходу второго триггера, причем объединенные гежду собой установочный вход счетчика и вход синхронизации регистра образуют вхоц синхронизации интегргшьного аналогоцифрового преобразователя, объединенные между собой управляющий вход дешифратора, второй вход второго триггера, второй вход логического элемента ИЛИ и объединенные между собой вход Формирователя импульсов, второй вход логического элемента И, первый вход второго триггера образуют управляющий вход интегрального аналогоцифрового преобразователя, а вход преобразователя напржение-частота образует вход интегральнго аналогоцифрового преобразователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Электропривод переменного тока | 1988 |
|
SU1534737A1 |
| Микропроцессорное устройство для управления вентильным преобразователем | 1985 |
|
SU1356155A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |


ЧАСТОТНО-УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА, содержащий асинхронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя частоты, снабженного входами для подключения .питающей сети, датчики фазных токов и датчик скорости вращения ротора, при этом управляющие входы преобразователя частоты связаны с блоком задания скорости и с дискретным вычислителем, снабженным информационными кодовыми шинами, образующими информационный канал, и управляющими . . шинами, образующими управляющий выход,отличающийся тем, что, с целью повышения точности регулирования скорости вращения . в динамических режимах работы, в него введены цифровые фазные распределители импульсов, каждый из которых снабжен информационным каналом, управляющим входом и входом синхронизации, блок синхронизации со вхог дами для подключения питгиощей сети, интегральные аналогоцифровые .преоб-г разователи, каждый из которых снаб-г жен информационным каналом, управ-. ляющим входом и входом синхронизации, и датчики .фазных напряжений .и потокосцеплений,.причем.блок задания скорости снабжен информационным каналом и управляющим ыходом, дискретный вычислитель снабжен входом синхронизации,выходы цифровых .Фазных распределителей импульсов подключены к управляющим эходам преобразователя частоты, вход.каждого . из интегральных аналогоцифровых преобразователей соединен с выходом одного из датчиков фазных токов, фазных напряжений, фазных потокосцеплений и скорости вращения ротора, информационные каналы цифровых фазных распределителей импульсов, i блока задания скорости и интегральных аналогоцифровых преобразовате(Л лей . объединены между собой и подключены к информационному каналу с дискретного вычислителя, управляющие входы цифровых фазных распределителей импульсов, блока задания скорости и интегральных аналогоцифровых преобразователей объединены . .между собой и подключены к управляю00 щему выходу дискретного вычислителя, а выход блока синхронизации подклюо чен ко входам синхронизации цифроСД. вых фазных распределителей импульсов, интегральных аналогоцифровых 0 преобразователей и дискретного выСП - числителя, при этом каждый из интегральных аналогоцифровых преобразователей содержит дешифратор с управляющим входом, два триггера, формирователь импульсов, логический элемент И, ло4 ческий элемент ИЛИ ,и последовательно соединенные преоб-. разователь напряжение-частота, бчетчик с установочным входом, регистр с входом синхронизации и шинный формирователь , снабженный информгщионными кодовыми шинами, образующими информационный канал интегрального аналогоцифрового преобразователя,
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам переменного тока, и может быть использовано в системах с высокими требованиями. по качеству регулирования скорости при низких энергетических затратах например в установках шахтных I клефьевых подъемников.
Известен частотно-управляемый электропривод переменного тока, содержащий асинхронный двигатель с короткозамкнутьм ротором, статорные обмотки которого через преобразователь частоты связаны с блоками задания потокосцепления ротора и ак. тивного тока статора, при этом структура электропривода построена по -принципу подчиненного ре -улирования с применением аналоговых блоков
ti.
Недостатком известного электропривода является невысокая точность регулирования скорости, обусловленная тем, чтов нем не полностью учитывается дискретный характер работы преобразователя частоты. Выдача импульсов управления на тиристоры преобразователя частоты происходит в моменты сравнения непрерывного выходного сигнала системы управления с опорным сигналом системы импульснфазового управления . Однако при этом моменты выдачи импульсов управления однозначно характеризуют среднее значение напряжения на интевгше дискретности преобразователя (интервал между точками естественной коммутации тиристоров), а не его мгновенные значения в различных точксцс интервала. Кроме того, после выдачи каждого импульса управления, несмотря на непрерывное действие систекы управления, ее связь с преобразователем прерывается вплоть до момента выдачи очередного импульса на тиристоры. В силу этого, при попытке реализовать максимально 5 возможное быстродействие и, соответственно, при увеличении коэффициента усиления системы управления в известном устройстве могут возник- нуть субгармонические колебания. 10 Для исключения явлений, обусловленных неучетом дискретности преобразователя, систему управления-в известном устройстве загрубляют, делая ее быстродействие в 1,5-2
j раза ниже предельного. В результате этого в известном уСтройстве не в полной мере используются динс1мические возможности электропривода переменного тока, питающегося от преобразователя частоты с непосред0 ственной связью.
Наиболее близким к изобретению по технической сущности является частотно-управляемый электропривод переменного тока, содержащий асин5 хронный двигатель с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя частоты, снабженного входами для подключения питающей сети,
0 датчики фазных токов и датчик скорости вращения ротора, при этом управляющие входы преобразователя частоты связаны с блоком задания скорости и с дискретным вычислителем,
5 снабженным информационными кодовыми шинами, образукадими информационный канал и управляющими шинами, образующими управляющий выход С2.
Известный электропривод выполнен 0 как на аналоговых, так и на дискретных элементах, а его недостатком является невысокая точность регулирования скорости вращения. В извест
ном электроприводе отсутствуег синхронизация в работе системы управления и преобразователя частоты, управление котррым осуществляется аналоговыми сигналами, при этом дискретность преобразователя частот учичалвается неполностью. Ширина импульса управления, подаваемого на силовые вентили преобразователя, определяется моментами сравнения непрерывного выходного сигнала системы управления с выходным сигналом генератора пилообразного напряжения Однако упомянутые моменты сравнения однозначно характеризуют среднее значение напряжения силового преобразователя на его интервале дискретности (тактовый интервал, задаваемый генератором пилы), а не его мгновенное значение в различных точках интервсша. Кроме того, после выдачи каждого импульса управления, несмотря на действия системы управлния (работающей с более высокой частотой) ее связь с силовым преобразователем прерывается вплоть до момента очередного сравнения ее выходного сигнала с пилообразным напряжением, т,е. определенное время система остается разомкнутой. Поэтому в известном электроприводе не удается реализовать максимально возможное быстродействие,
В известном устройстве функциональные зависимости момент-скольжение, амплитуда тока стахора-момент реешизуются табличным способом, что предполагает постоянство амплитуды тока намагничивания асинхронного двигателя. Отсутствие в устройстве стабилизирующей обратной связи по току намагничивания также не позволет обеспечить максимального быстродействия и высокой точности регулирования скорости,
Целью изобретения является повышение точности регулирования скорости вращения в динамических режимах работы частотно-управляемого электрпривода переменного тока.
Указанная цель достигается тем, что в частотно-управляемый электропривод переменного тока, содержащий асинхронный дригатель с короткозамкнутым ротором, схаторные обмотки которого подключены к выходам преобразователя частоты, снабженного входами для подключения питающей сети, датчики фазных токов и датчик скорости вращения ротора, при этом управляющие входы преобразователя частоты связаны с блоком задания скорости и с дискретным вычислителем, снабженным информационными кодовыми шинами, образующими информационный канал, и управляющими шинами, образующими управляющий выход, введены цифровые фазные
распределители импульсов, каждый из которых снабжен информационным каналом, управляющим входом и входом синхронизации, блок синхронизации со входами для подключения питающей сети и интегральные аналогоцифровые преобразователи, каждый из которых снабжен информационным каналом, управляющим входом и входом синхронизации, и датчики фазных
напряжений и потокосцеплений, при этом блок задания скорости снабжен информационным каналом и управляющим входом, дискретный вычислитель снабжен входом синхронизации, выходы
цифровых фазных распределителей импульсов подключены к управляющим входам преобразователя частоты, вход каждого из интегральных аналогоцифровых преобразователей соединен с
выходом одного из датчиков фазных токов, фазных напряжений, фазных потокосцеплений и скорости вращения ротора,информационные каналы цифровых фазных распределителей импульсов
блока задания скорости и интегральных аналогоцифров1ЕИс преобразователей объединены между собой и подключены к информационному каналу дискретного вычислителя, управляющие входы .цифровых фазных распределителей импульсов, блока задания скорости и интегральных аналогоцифровых преобразователей объединены между собой и подключены к управляющему выходу дискретного вычислителя, а
выход блока синхронизации подключен ко входам синхронизации цифровых фазных распределителей импульсов, интегральных аналогоцифровых преобразователей и дискретного вычислителя, при этом каждый из интегральных аналогоцифровых преобразователей содержит дешифратор с управляющим входом, два триггера, формирователь и myльcoв, логический элемент И, логический элемент ИЛИ и последовательно соединенные преобразователь напряжение-частота, счетчик с установочным входом, регистр с входом синхронизации и шинный формирователь,
снабженный информационными кодовыми
шинами, образующими информационный канал интегрального аналогоцифрового преобразователя, ориентирующим и управляющим входами и выходными кодовыми шинами, подключенными к входным
кодовым ,шинам дешифратора, выход
которого подсоединен к первому входу первого триггера, вторым входом подключенного к выходу формирователя импульсов, выход первого триггера
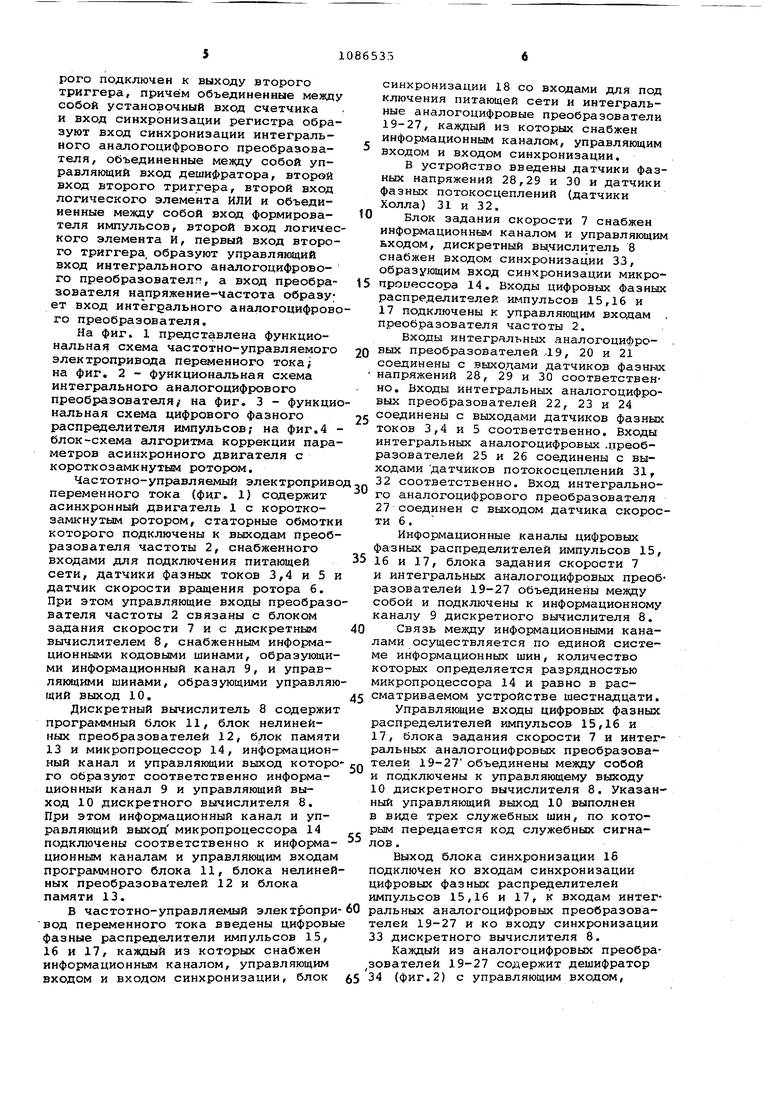
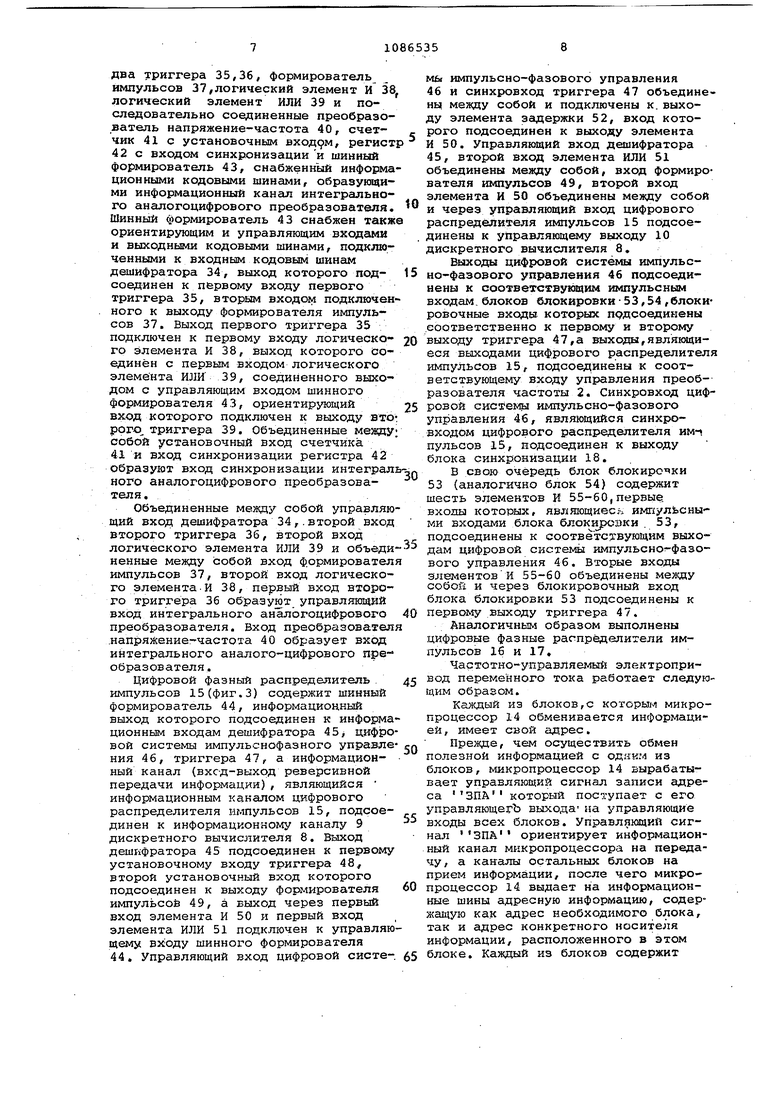
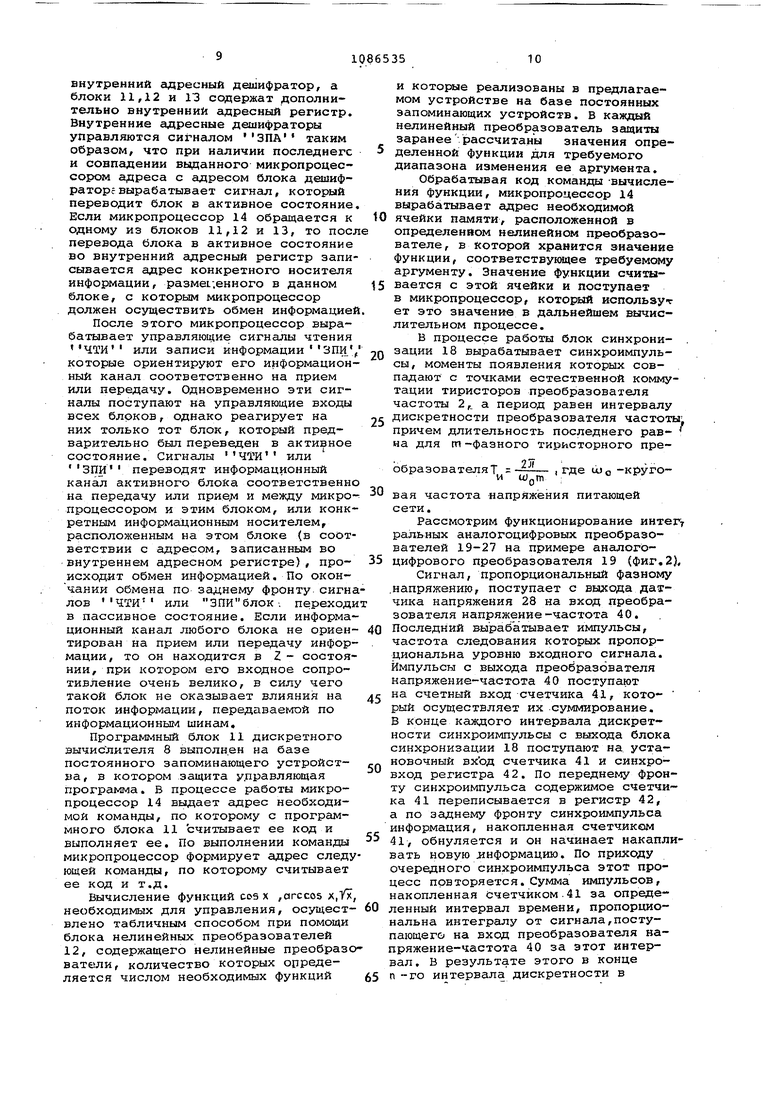
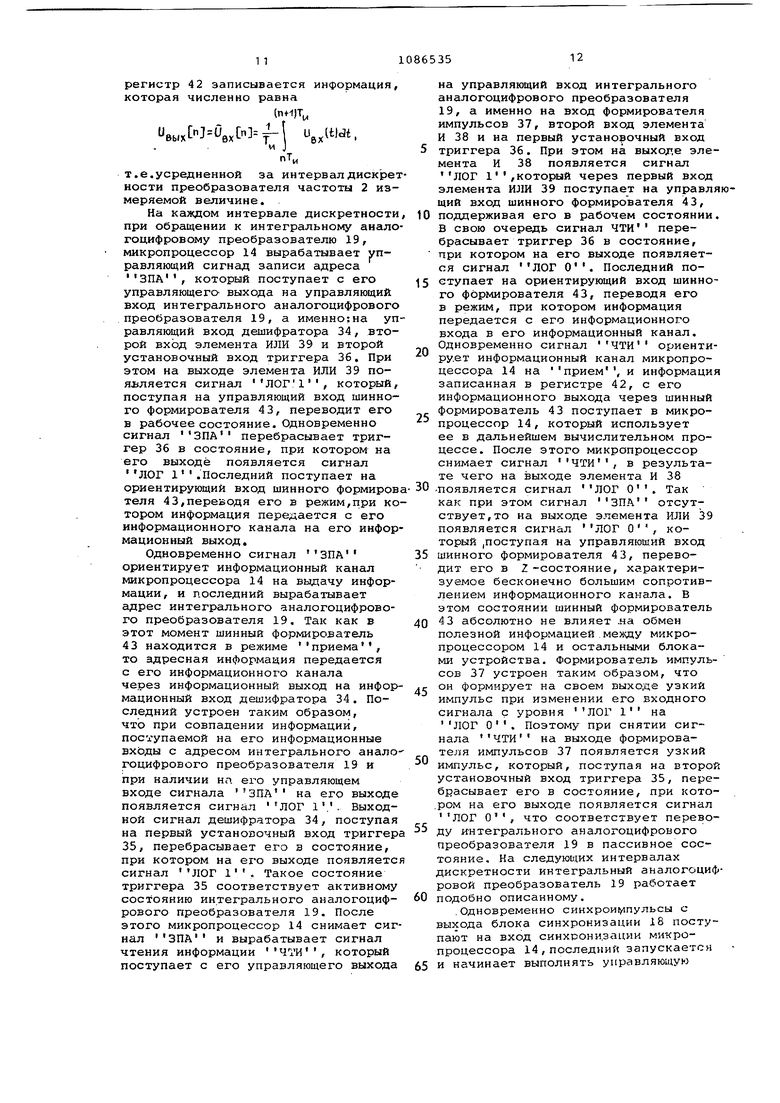
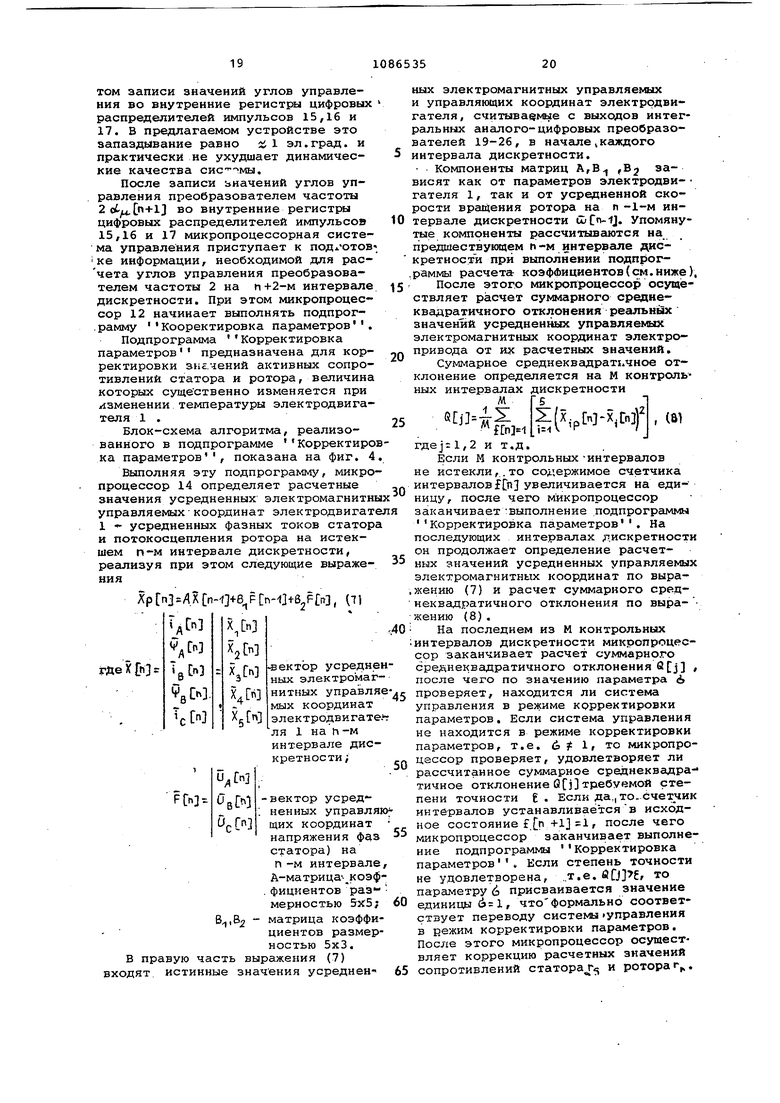
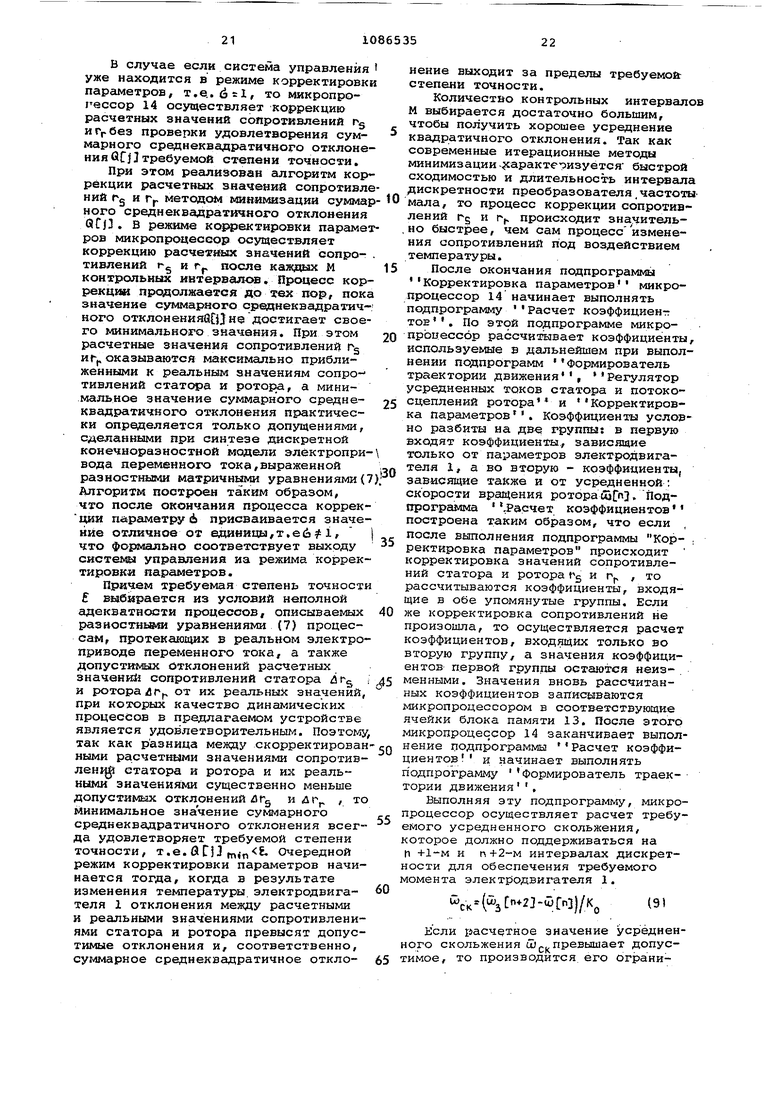
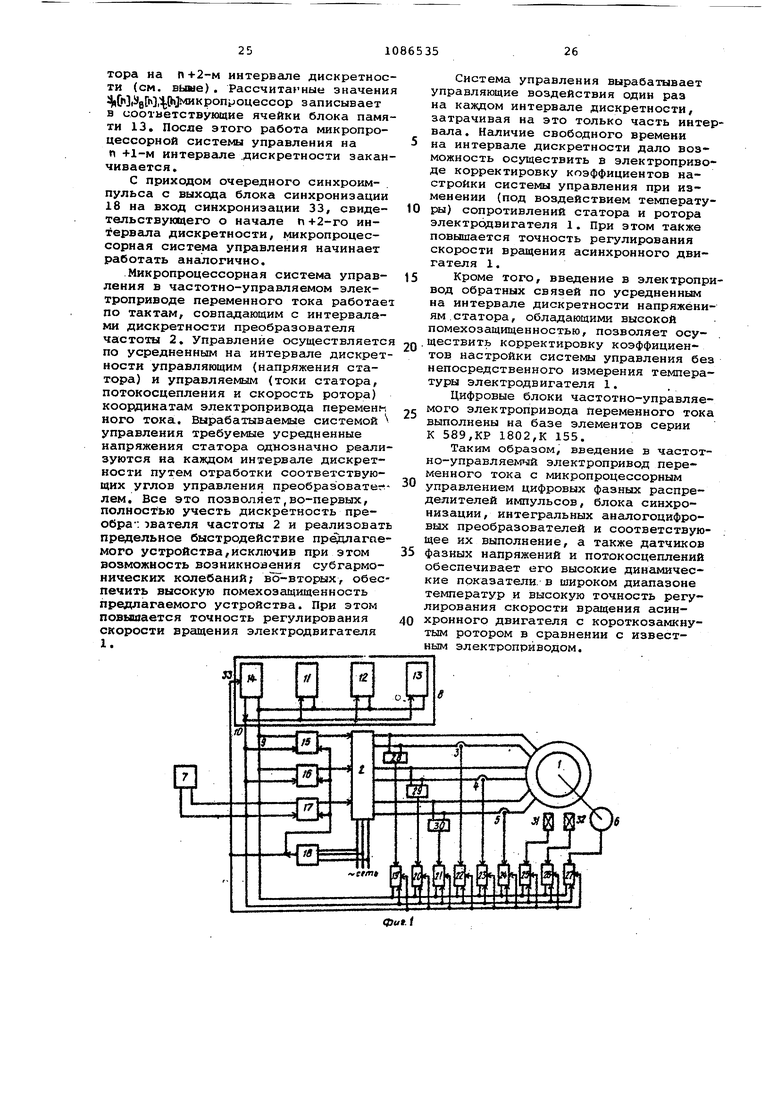
подключен к первому входу логического элемента И, выход 1{:оторого соединен с первым входом логического элемента ИЛИ,соединенного выходом с управляющим входом шинного формирователя, ориентирующий вход кото510рого подключен к выходу второго триггера, причем объединенные между собой установочный вход счетчика ; и вход синхронизации регистра образуют вход синхронизации интегрального аналогоцифрового преобразователя, объединенные между собой управляющий вход дешифратора, второй вход второго триггера, второй вход логического элемента ИЛИ и объединенные между собой вход формирователя импульсов, второй вход логического элемента И, первый вход второго триггера, образуют управляющий вход интегрального аналогоцифрового преобразователт, а вход преобразователя напряжение-частота образу; ет вход интегвального аналогоцифрового преобразователя. На фиг. 1 представлена функциональная схема частотно-управляемого электропривода переменного тока; на фиг, 2 - функциональная схема интегрального аналогоцифрового преобразователя,- на фиг, 3 - функцио нальная схема цифрового фазного распределителя импульсов; на фиг,4 блок-схема алгоритма коррекции параметров асинхронного двигателя с короткозамкнутым ротором. Частотно-управляемый электропривод переменного тока (фиг. 1) содержит асинхронный двигатель 1 с короткозамкнутым ротором, статорные обмотки которого подключены к выходам преобразователя частоты 2, снабженного входами для подключения питающей сети, датчики фазных токов 3,4 и 5 и датчик скорости вращения ротора 6. При этом управляющие входы преобразователя частоты 2 связаны с блоком задания скорости 7 и с дискретным вычислителем 8, снабженным кнформационными кодовыми шинами, образующими информационный канал 9, и управляющими шинами, образующими управляющий выход 10, Дискретный вычислитель 8 содержит программный блок 11, блок нелинейных преобразователей 12, блок памяти 13 и микропроцессор 14, инфopvIaциoнный канал и управляющий выход которого образуют соответственно ииформационный канал 9 и управляющий выход 10 дискретного вычислителя 8. При этом информационный канал и управляющий выход микропроцессора 14 подключены соответственно к инфо мационным каналам и управляющим входам программного блока 11, блока нелинейных преобразователей 12 и блока памяти 13, В частотно-управляемый электропривод переменного тока введены цифровые фазные распределители импульсов 15, 16 и 17, каждый из которых снабжен информационным каналом, управляющим входом и входом синхронизации, блок 65356 синхронизации 18 со входами для под ключения питающей сети и интегральные аналогоцифровые преобразователи 19-27, каждый из которых снабжен информационным каналом, управляющим з входом и входом синхронизации, в устройство введены датчики фазных напряжений 28,29 и 30 и датчики фазных потокосцеплений (датчики Холла) 31 и 32. 10 БЛОК задания скорости 7 снабжен информационным каналом и управляющим входом, дискретный вычислитель 8 снабжен входом синхронизации 33, образующим вход синхронизации микро15 процессора 14. Входы цифровых фазных распределителей шлпульсов 15,16 и 17 подключены к управляющим входам , преобразователя частоты 2. Входы интегральных аналогоцифро- . 20 преобразователей ..19, 20 и 21 соединены с .выходами датчиков фазных напряжений 28, 29 и 30 соответственно. Входы интегральных аналогоцифровь1х преобразователей 22, 23 и 24 25 соединены с выходами датчиков фазных токов 3,4 и 5 соответственно. Входы интегральных аналогоцифровых .преобразователей 25 и 26 соединены с выходами датчиков потокосцеплений 31, ,,. 32 соответственно. Вход интегрального аналогоцифрового преобразователя 27 соединен с выходом датчика скорости 6. Информационные каналы цифровых фазных распределителей импульсов 15, 5 16 и 17, блока задания скорости 7 и интегральных аналогоцифровых преобразователей 19-27 объединены между собой и подключены к информационному каналу 9 дискретного вычислителя 8. 0 Связь между информационными каналами осуществляется по единой системе информационных шин, количество которых определяется разрядностью микропроцессора 14 и равно в рас5 сматриваемом устройстве шестнадцати. Управляющие входы цифровых фазных распределителей импульсов 15,16 и 17, блока задания скорости 7 и интегральных аналогоцифровых преобразоза п телей 19-27объединены между собой и подключены к управляющему выходу Ю дискретного вычислителя 8. Указанный управляющий выход 10 выполнен в виде трех служебных шин, по которым передается код служебных сигналов. Выход блока синхронизации 16 подключен ко входам синхронизации цифровых фазных распределителей импульсов 15,16 н 17, к входам интег0 ральных аналогоцифровых преобразователей 19-27 и ко входу синхронизации 33 дискретного вычислителя В. Каждый из аналогоцифровых преобра,зователей 19-27 содержит дешифратор 5 34 (фиг.2) с управляющим входом.
два триггера 35,36, формирователь импульсов 37,логический элемент И 38 логический элемент ИЛИ 39 и последовательно соединенные преобразователь напряжение-частота 40, счетчик 41с установочным вход9м, регистр 42с входом синхронизации и шинный формирователь 43, снабженный информационными кодовыми шинами, образующими информационный канал интегрального аналогоцифрового преобразователя, Шинный формирователь 43 снабжен также ориентирующим и управляющим входами и выходными кодовыми шинами, подключенными к входным кодовым шинам дешифратора 34, выход которого подсоединен к первому входу первого триггера 35, вторым входом подключенного к выходу формирователя импульсов 37. Выход первого триггера 35 подключен к первому входу логического элемента И 38, выход которого соединён с первым входом логического элемента ИЛИ 39, соединенного выходом с управляющим входом шинного формирователя 43, ориентирующий вход которого подключен к выходу ВТО-: рого, триггера 39. Объединенные между; собой установочный вход счетчика 41 и вход синхронизации регистра 42 образуют вход синхронизации интегрального аналогодифрового преобразователя.
Объединенные между собой управляющий вход дешифратора 34,.второй вход второго триггера 36, второй вход логического элемента ИЛИ 39 и объедииенные между собой вход формирователя импульсов 37, второй вход логического элемента .И 38, первый вход второго триггера 36 образуют управляющий вход интегрального аналогоцифрового преобразователя. Вход преобразователя .напряжение-частота 40 образует вход интегрального аналого-цифрового преобразователя.
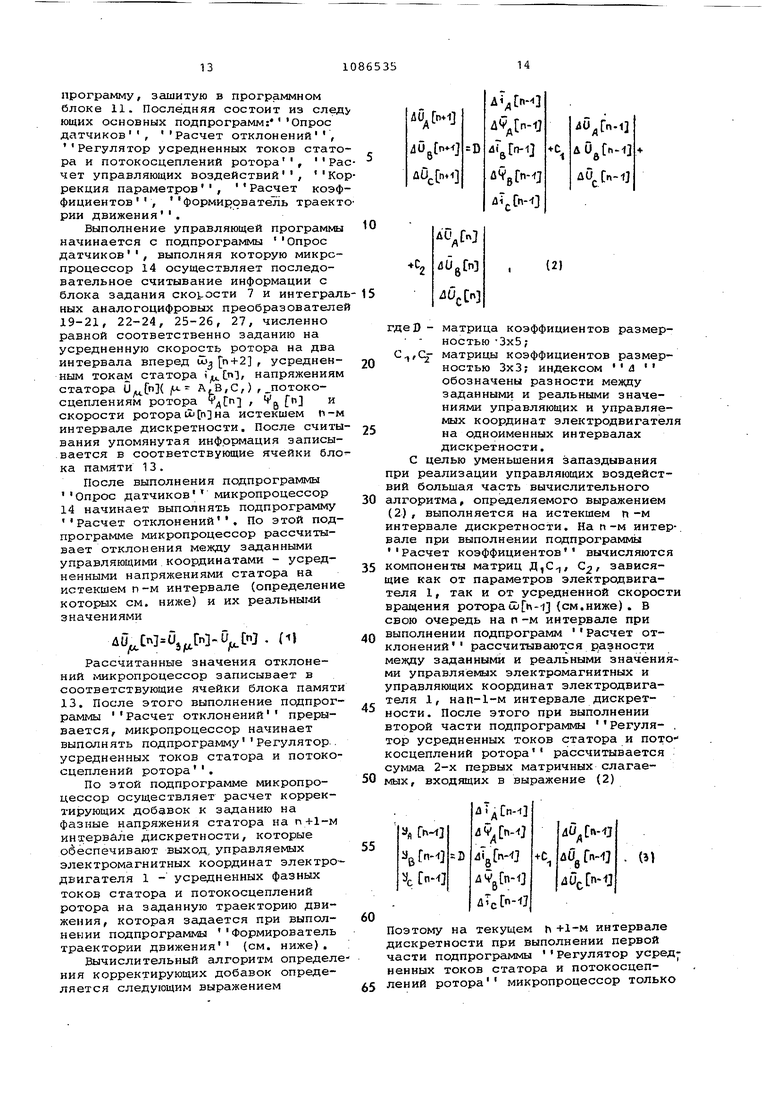
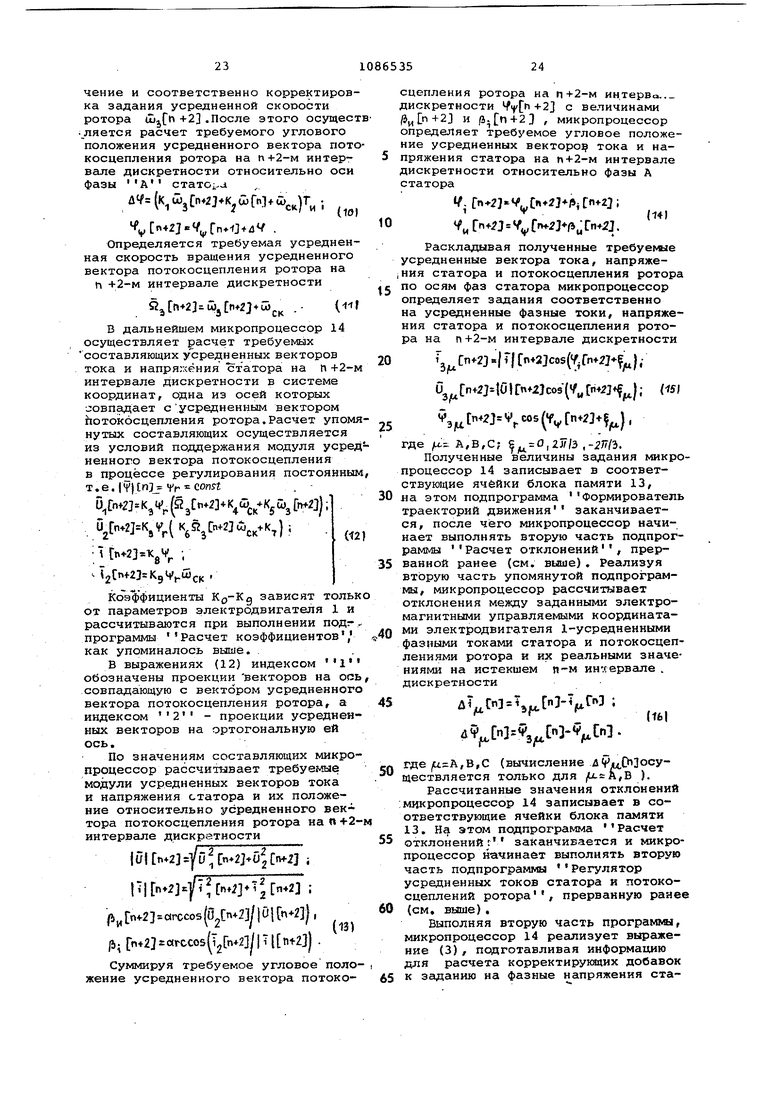
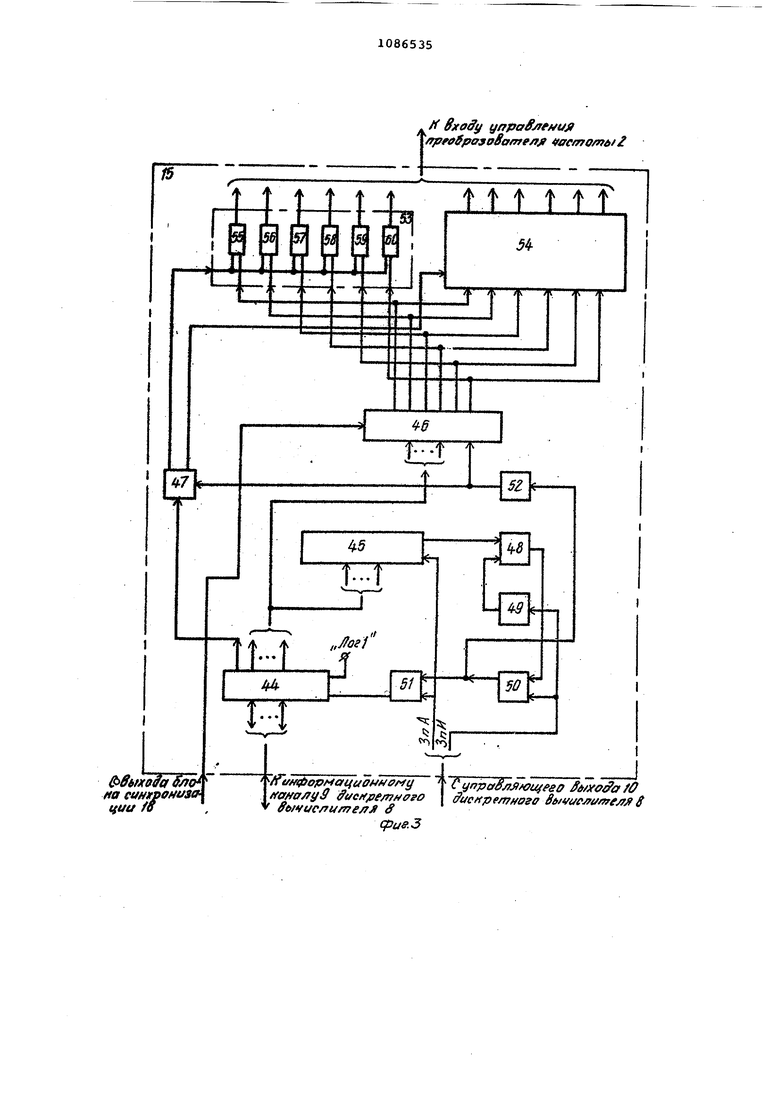
Цифровой фазный распределитель импульсов 15(фиг.3) содержит шинный формирователь 44, информационный выход которого подсоединен к информационным входам дешифратора 45 цифровой системы импульснофазного управления 46, триггера 47, а информационный канал (вход-выход реверсивной передачи информации), являющийся информационным каналом цифрового распределителя импульсов 15, подсоединен к информационному каналу 9 дискретного вычислител;я 8. Выход дешифратора 45 подсоединен к первому установочному входу триггера 48, второй установочный вход которого подсоединен к выходу формирователя импульсов 49, а выход через первый вход элемента И 50 и первый вход элемента ИЛИ 51 подключен к управляющему входу шинного формирователя 44. Управляющий вход цифровой систе-.
Мб импульсно-фазового управления 46 и синхровход триггера 47 объединены, между собой и подключены к.выходу элемента задержки 52, вход которого подсоединен к выходу элемента И 50. Управляющий вход дешифратора 45, второй вход элемента ИЛИ 51 объединены между собой, вход формирователя импульсов 49, второй вход элемента И 50 объединены между собой и через управляющий вход цифрового распределителя импульсов 15 подсоединены к управляющему вькоду 10 дискретного вычислителя 8,
Выходы цифровой системы импульсно-фазового управления 46 подсоединены к соответству1Ш им импульсным входам,блоков блокировки-53,54,блокировочные входы которых прдсоединены .соответственно к первому и второму выходу триггера 47,а выходы,являкядиеся выходами цифрового распределител импульсов 15, подсоединены к соответствующему входу управления преобразователя частоты 2. Синхровход цифровой систекы импульсно-фазового управления 46, являющийся синхровкодом цифрового распределителя им- пульсов 15, подсоединен к выходу блока синхронизации 18.
В свою очередь блок блокировки 53 (аналогично блок 54) содержит шесть элементов И 55-60, первые. ВХО.ПЫ которых, являющиеся импульсными входами блока блокировки ..53, подсоединены к соответствующим выходам цифровой системы импульсно-фазового управления 46. Вторые входы элементовИ 55-60 объединены между собой и через блокировочный вход блока блокировки 53 подсоединены к первому выходу триггера 47.
Диалогичным образом выполнены цифровые фазные распределители импульсов 16 и 17,
Частотно-управЛяемы 5 электропривод переменного тока работает следующим образом.
Каждый из блоков,с которы микропроцессор 14 обменивается информацией, имеет свой адрес.
Прежде, чем осуществить обмен полезной информацией с одякм из блоков, микропроцессор 14 вырабатывает управляющий сигнал записи адреса ЗПА который поступает с его управляютцегЪ выхода- на управляющие входы всех блоков. Управляющий сигнал ЗПА ориентирует информационный канал микропроцессора на передачу, а каналы остальных блоков на прием информации, после чего микропроцессор 14 выдает на информационные шины адресную информацию, содержащую как адрес необходимого блока, так и адрес конкретного носителя информации, расположенного в этом блоке. Каждый из блоков содержит внутренний адресный дешифратор, а блоки 11,12 и 13 содержат дополнительно внутренний адресный регистр. Внутренние адресные дешифраторы управляются сигналом ЗПА таким образом, что при наличии последнего и совпадении выданного микропроцессором адреса с адресом блока детаифраторс вырабатывает сигнгш, который переводит блок в активное состояние Если микропроцессор 14 обращается к одному из блоков 11,12 и 13, то посл перевода блока в активное состояние во внутренний адресный регистр записывается адрес конкретного носителя информации, разме1-.енного в данном блоке, с которым микропроцессор должен осуществить обмен информацией После этого микропроцессор вырабатывает управляющие сигналы чтения ЧТИ или записи информации ЗПИ которые ориентируют его информационный канал соответственно на прием или передачу. Одновременно эти сигналы поступают на управляющие входы всех блоков, однако реагирует на них только тот блок, который предварительно был переведен в активное состояние. Сигналы ЧТИ или ЗПИ переводят информационный канал активного блока соответственно на передачу или прие;л и между микропроцессором и этим блоком, или конкретным информаЛдионным носителем, расположенным на этом блоке (в соответствии с адресом, записанным во внутреннем адресном регистре), происходит обмен информацией. По окончании обмена по заднему фронту сигна или ЗПИ блок. переходи в пассивное состояние. Если информационный канал любого блока не ориентирован на прием или передачу информации, то он находится в Z - состоянии, при котором его входное сопротивление очень велико, в силу чего такой блок не оказывает влияния на поток информации, передаваемой по информационным шинс1М, Программный блок 11 дискретного эычислителя 8 выполн.ен на базе постоянного запоминающего устройства, в котором защита удравляющая программа. В процессе работы микропроцессор 14 выдает адрес необходимой команды, по которому с программного блока 11 считывает ее код и выполняет ее. По выполнении команды микропроцессор формирует адрес следу ющей команды, по которому считывает ее код и т.д. Вычисление функций cos х ,агссо5 х.Ух необходимых для управления, осуществлено табличным способом при помощи блока нелинейных преобразователей 12, содержащего нелинейные преобразо ватели, количество которых определяется числом необходимых функций и которые реализованы в предлагаемом устройстве на базе постоянных запоминающих устройств. В каждый нелинейный преобразователь защиты заранеерассчитаны значения определенной функции для требуемого диапазона изменения ее аргумента. Обрабатывая код команды -вычисления функции, микропроцессор 14 вырабатывает адрес необходимой ячейки памяти, расположенной в определенвом нелинейном преобразователе, в которой хранится значение функции, соответствукидее требуемому аргументу. Значение функции счикавается с этой ячейки и поступает в микропроцессор, который использут ет это значение в дальнейшем вычислительном процессе. В процессе работы блок синхрони- . зации 18 вырабатывает синхроимпульсы, моменты появления которых совпадают с точками естественной коммутации тиристоров преобразователя частоты 2,. а период равен интервалу дискретности преобразователя частоты причем длительность последнего равна для m-фазного тиристорного образователяТ - где ujo -к руговая частота напряжения питающей сети. Рассмотрим функционирование интегу ральных аналогоцифровых преобразователей 19-27 на примере аналогоцифрового преобразователя 19 (фиг. 2), Сигнал, пропорциональный фазному .напряжению, поступает с выхода датчика напряжения 28 на вход преобразователя напряжение -частота 40. Последний вырабатывает импульсы, частота следования которых пропорциональна уровню входного сигнала. Импульсы с выхода преобразователя напряжение-частота 40 поступают на счетный вход счетчика 41, который осуществляет их -суммирование. В конце каждого интервала дискретности синхроимпульсы с выхода блока синхронизации 18 поступают на установочный вход счетчика 41 и синхровход регистра 42. По переднему фронту синхроимпульса содержимое счетчика 41 переписывается в регистр 42, а по заднему Фронту синхроимпульса информация, накопленная счетчиком 41, обнуляется и он начинает накапливать новую информацию. По приходу очередного синхроимпульса этот процесс повторяется. Сумма импульсов, накопленная Счетчиком .41 за опредеенный интервал времени, пропорциональна интегралу от сигнала,поступающего на вход преобразователя наряжение-частота 40 за этот интервал. В результате этого в конце п го интервала дискретности в
регистр 42 записывается информация, которая численно равна
(п+1)Т,
UftMv 0,
u.UWt.
вX
вых
пТ.,
Т.е.усредненной за интервал дискретности преобразователя частоты 2 измеряемой величине.
На каждом интервале дискретности при обращении к интегральному аналогоцифровому преобразователю 19, микропроцессор 14 вырабатывает управляющий сигнад записи адреса ЗПА , который поступает с его управляющего- выхода на управляющий вход интегрального аналогоцифрового преобразователя 19, а именно;на управляющий вход дешифратора 34, второй вход элемента ИЛИ 39 и второй установочный вход триггера 36. При этом на выходе элемента ИЛИ 39 пояьляется сигнал ЛОГ1, который, поступая на управляющий вход шинного формирователя 43, переводит его в рабочее состояние. Одновременно сигнал ЗПА перебрасывает триггер 36 в состояние, при котором на его выходе появляется сигнал ЛОГ 1.Последний поступает на ориентирующий вход шинного формировтеля 43,переводя его в режим,при котором информация передается с его информационного канала на его информационный выход.
Одновременно сигнал ЗИЛ ориентирует информационный канал микропроцессора 14 на выдачу информации, и последний вырабатывает адрес интегрального аналогоцифрового преобразователя 19. Так как в этот момент шинный формирователь 43 находится в режиме приема , то адресная информация передается с его информационного канала через информационный выход на информационный вход дешифратора 34. Последний устроен таким образом, что при совпадении информации, поступаемой на его информационные входы с адресом интегрального анало гоцифрового преобразователя 19 и при наличии но. его управляющем
ЗПА
входе сигнала
на его выходе
появляется сигнал ЛОГ 1.. Выходной сигнал дешифратора 34, поступая на первый установочный вход триггера 35, перебрасывает его в состояние, при котором на его выходе появляется
ЛОГ 1
Такое состояние
сигнал
триггера 35 соответствует активному состоянию интегрального аналогоцифрового преобразователя 19. После этого микропроцессор 14 снимает сигнал ЗПА и вырабатывает сигнал чтения информации ЧТИ, который поступает с его управляющего выхода
на управляющий вход интегрального аналогоцифрового преобразователя 19, а именно на вход формирователя импульсов 37, второй вход элемента И 38 и на первый устаноэочный вход триггера 36. При этом на выходе элемента И 38 появляется сигнал ЛОГ 1,который через первый вход элемента ИЛИ 39 поступает на управляющий вход шинного формирователя 43,
0 поддерживая его в рабочем состоянии. В свою очередь сигнал перебрасывает триггер 36 в состояние, при котором на его выходе появляется сигнал ЛОГ О. Последний поступает на ориентирующий вход шинно5го формирователя 43, переводя его в режим, при котором информация передается с его информационного входа в его информационный канал. Одновременно сигнал ЧТИ ориенти0рует информационный канал микропроцессора 14 на прием, и информация записанная в регистре 42, с его информационного выхода через шинный формирователь 43 поступает в микро5процессор 14, который использует ее в дальнейшем вычислительном процессе. После этого микропроцессор снимает сигнал ЧТИ, в результате чего на выходе элемента И 38
0 появляется сигнал ЛОГ О. Так
ЗПА
отсуткак при этом сигнал
ствует, то на выходе элемента ИЛИ 39 появляется сигнал ЛОГ О, который |Поступая на управляющий вход
5 шинного формирователя 43, переводит его в Z-состояние, характеризуемое бесконечно большим сопротивлением информационного канала. В этом состоянии шинный формирователь 43 абсолютно не влияет .на обмен
0 полезной информацией.между микропроцессором 14 и остальными блоками устройства. Формирователь импульсов 37 устроен таким образом, что он формирует на своем выходе узкий
5 импульс при изменении его входного сигнала с уровня ЛОГ 1 на ЛОГ О. Поэтому при снятии сигнала ЧТИ на выходе формирователя импульсов 37 появляется узкий
0 импульс, который, поступая на второй установочный вход триггера 35, перебрасывает его в состояние, при кото.ром на его выходе появляется сигнал ЛОГ О, что соответствует перево5ду и-нтегрального аналогоцифрового преобразователя 19 в пассивное состояние. На следующих интервалах дискретности интегральный аналогоцифровой преобразователь 19 работает
0 подобно описанному.
.Одновременно синхроиг)1пульсы с выхода блока синхронизации 18 поступают на вход синхрони.зации микропроцессора 14, последний запускается и начинает выполнять управляющую
5
программу, зашитую в программном блоке 11. Последняя состоит из следу ющих основных подпрограмм: Опрос
Расчет отклонений
датчиков
Регулятор усредненных токов статора и потокосцеплений ротора, Расчет управляющих воздействий, Кор
рекция параметров, Расчет коэфтр
формирователь траекто
фициентов , рии движения
Выполнение управляющей программы Опрос начинается с подпрограммы датчиков, выполняя которую микро процессор 14 осуществляет последовательное считывание информации с блока задания скорости 7 и интеграл ных аналогоцифровых преобразовател 19-21, 22-24, 25-26, 27, численно равной соответственно заданию на усредненную скорость ротора на два интервала вперед lo п + 2 , усредненным токам статора , напряжениям статора ( jU. - А, В, С,) , потокосцеплениям ротора , ч и скорости ротора Л п на истекшем и-м интервале дискретности. После считы вания упомянутая информация записывается в соответствующие ячейки бло ка памяти 13. После выполнения подпрограммы Опрос датчиков микропроцессор 14 начинает выполнять подпрограмму Расчет отклонений. По этой подпрограмме микропроцессор рассчитывает отклонения между заданными управляющими координатами - усредненными напряжениями статора на истекшем п-м интервале (определени которых см. ниже) и их реальныгли значениями .. (1} Рассчитанные значения отклонений микропроцессор записывает в соответствующие ячейки блока памяти 13. После этого выполнение подпрограммы Расчет отклонений прерывается, микропроцессор начинает выполнять подпрограммуРегулятор . усредненных токов статора и потокосцеплений ротора . По этой подпрограмме микропроцессор осуществляет расчет корректирующих добавок к заданию на фазные напряжения статора на п+1-м интервале дискретности, которые обеспечивают выход, управляемых электромагнитных координат электродвигателя 1 - усредненных фазных TOKOS статора и потокосцеплений ротора на заданную траекторию движения, которая задается при выполнении подпрограммы Формирователь траектории движения (см. ниже) . Вычислительный алгоритм определе ния корректирующих добавок определяется следующим выражением гдеD - матрица коэффициентов размер ностью 3x5; матрицы коэффициентов размерностью 3x3; индексом Л обозначены разности между заданными и реальными значениями управляющих и управляемых координат электродвигателя на одноименных интервалах дискретности, С целью уменьшения запаздывания при реализации управляющих воздействий большая часть вычислительного алгоритма, определяемого выражением (2), выполняется на истекшем и-м интервале дискретности. На п-м интер-. вале при выполнении подпрограммы Расчет коэффициентов вычисляются компоненты матриц Д,С, С2, зависящие как от параметров электродвигателя 1, так и от усредненной скорости вращения ротораuj h-ij (см,ниже) . В свою очередь на п-м интервале при выполнении подпрограмм Расчет отклонений рассчитываются разност;и между заданными и реальными значениями управляемых электромагнитных и управляющих координат электродвигателя 1, нап-1-м интервале дискретности. После этого при выполнении второй части подпрограммы Регуля- . тор усредненных токов статора и пото косцеплений ротора рассчитывается сумма 2-х первых матричных слагаемых, входящих в выражение (2) Поэтому на текущем h +1-м интервале дискретности при выполнении первой части подпрограммы Регулятор усредненных токов статора и потокосцеплений ротора микропроцессор только завершает расчет корректирующих добавок, реализуя при этом выражение ли HJ дО.( и затрачивая на это минимум необходимого времени. После расчета корректирующих добавок микропроцессор осуществляе расчет средних значений фазных напряжений статора, которые необхо;димо реализовать на п +1-м интервале дискретности: . (51 где ;а А,В,С. Если хотя бы одно из расчетных значений напряжений статора ид(п+1 превосходит допустимое, то производится их ограничение. Полученные значения фазных напряжений статора /иСп+1 микропроцессор записывает в соответствующие ячейки блока памя ти 13, после чего выполнение подпрограммы Регулятор усредненных токов статора и потокосцеплений ротора прерывается и микропроцессор начинает выполнять подпрограмму расчет :управляющих воздействий. По этой подпрограмме микропроцессор осуществляет расчет углов управления преобразователем на м+1 интервале дискретности, реализуя следующие выражения ; t - n R «ccos(), (€) I где R и R2 - постоянные коэффициенты Рассчитанные углы управления микропроцессор переписывает во внутренние регистры цифровых фазных распределителей импульсов , функционирование которых рас смотрим на примере распределителя импульсов 15 (фиг.З). На каждом интервале дискретности при обрсидении к цифровому рас,пределителю импульсов 15 микропроцессор 14 вырабатывает управляющий сигнал записи адреса ЗПА, который поступает с его управляющехО выхода на управляющий вход цифрового распределителя импульсов 15, а именно на управляющий вход дешифратора 45 и на второй вход элемента ИЛИ 51. При этом на выходе последнего появл ется сигнал ЛОГ 1, который,пос пая на управляющий вход шинного формирователя 44, переводит его в рабочее состояние. В свою очередь ориентирующий вход шинного формиро вателя 44 постоянно подается сигна ЛОГ. 1г в результате чего он находится в режиме, при котором ин формация передается с его информационного канала на его информационный выход. Одновременно сигнал ЗПА ориентирует информационный канал микропроцессора 14 на выдачу информации и последний вырабатывает адрес цифрового распределителя импульсов 15. Адресная информация с информационного кангша микропроцессора попадает в информационный канал шинного формирователя 44 и через его информационный выход поступает на информационные входы дешифратора 45. Последний устроен таким образом, что при совпадении информации, поступившей на его информационные входы с адресе цифрового распределителя импульсов 15 и при наличии на его управляющем входе сигнала ЗПА на его выходе появляется сигнал ЛОГ. 1. Выходной сигнал дешифратора 45, поступая на первый установочный вход триггера 48, перебрасывает его в состояние, при котором на его выходе появляется сигнал ЛОГ, 1. Такое состояние триггера 48 соответствует активному состоянию цифрового распределителя импульсов 15. После этого микропроцессор снимает сигнал ЗПА и вырабатывает сигнал записи информации ЗПИ, который поступает с его управляющего выхода на управляющий вход цифрового распределителя импульсов 15, а именно на вход формирователя импульсов 49 и на второй вход элемента И 50. При этом на выходе элемента И 50 появляется сигнал ЛОГ, 1, который через первый вход элемента ИЛИ 51 поступает на управ- ляющий вход шинного формирователя 44, поддерживая его в рабочем состоянии. В свою очередь выходной сигнал элемента И 50 поступает на вход элемента задержки 52 и запускает его. Одновременно сигнал ЗПИориентирует информационный канал микропроцессора на выдачу и последний выдает необходимую информацийо, которая попадает в информационный канал шинного формирователя 44 и через его информационный выход поступает на информационные входы цифровой системы импульснофазоЁого управления 46 и триггера 47. В этот момент элемент задержки 52 вырабатывает узкий импульс, который, поступая на синхровход триггера 47 и управляющий вход цифровой системы импульснофазового управления 46, осуществляет запись необходимой информации в триггер 47 и во внутренний регистр угла управления цифровой системы импульсно-фазового управления 46. Цифровой распределитель имаульсов 15 предназначен для раздельного управления фазны ад тиристорными группами преобразователя частоты 2, поэтому информация, передаваемая в цифровой распределитель импульсов 15, формирует ся микропроцессором таким образом, что в триггер 47 записывается номер тиристорной группы, которая должна работать на текущем интервале дискретности, а во внутренний регистр угла управления цифровой системы импульсно-фазового управления 46 записывается код угла управления, который должен быть отработан на, текущем интервале дискретности. При этом дешифратор 45 не реагирует на информацию, поступающую на его инфомационный вход с информационного вы хода шинного формирователя 44, так как отсутствует сигнал ЗПА. После этого микропроцессор снимает сигнал ЗПИ, в результате чего на выходе элемента И 50 появляется сигнал ЛОГ. О. Так как сигнал ЗПА отсутствует, то на выходе элемента ИЛИ 51 появляется сигнал ЛОГ О, который, поступая на управляющий вход шинного формирователя 44, переводит его в 2 -состояние, характеризуемое бесконечно большим сопротивлением информационного канала. В этом состоянии шинный формирователь 44 абсолютно не влияет на обмен полезной информацией между микропроцессором и остальными блоками устройства. Формирователь импульсов 49 устроен таким обра:.DM, что он формирует на своем выходе узкий импульс при изменении его входного сигнала с уровня ЛОГ 1на ЛОГ О.Поэтому при снятии сигнала.ЗПИна выходе формрователя импульсов 49 появляется . узкий импульс,который,поступая на. второй установочный вход триггера 48,перебрасывает его в состояние,пр котором на его выходе появляется синал ЛОГ О,что соответствует переводу цифрового распределителя.импулсов 15 в пассивное состояние. Дальнейшая работа цифрового распределителя импульсов 15 на интервале дискретности заключается в работе цифровой системы импульсно-фазового управления 46. Синхроимпульсы, поступающие в конце каждого интервеша дискретности на синхровход цифровой системы импульснофазового управления 46 с выхода блока синхронизации 18, преобразуются внутренним блоком синхронизации в сигналы, осуществляющие ее синхронизацию с питающей сетью. Цифровая система импульснотфазового управления 46 содержит счетчики, отсчитывающие длительност временных интервалов от точек естественной коммутации определенных тиристоров преобразователя частоты с непосредственной связью 2. Информация, накапливаемая счетчиками, сравнивается с кодом угла управлени
записанном во внутреннем регистре угла управления, в момент сравнения на определенном выходе цифровой системы импульсно-фазового управления 46 появляется импульс управления , который через блок блокировки
53или 54 (в зависимости от того, какая из фазных типисторных групп преобразователя частоты 2 должна работать) поступает на конкретные тиристоры, реализуя тем самым необходимый угол управления фазной тиристорной группой преобразователя частоты 2. При этом, если должна работать первая фазная тиристорная группа, в триггер 47 записывается информация, при которой на его первом выходе появляется сигнал ЛОГ 1,а на его втором выходе соответственно-- ЛОГ О.Сигнал ЛОГ 1с первого выхода триггера 47 через блокировочный вход блока блокировки 53 поступает на вторые входы элементов И 55-60, после чего импульс управления с определенного выхода цифровой системы импульснофазового управления 46 через соответствующий элемент И блока блокировки 53 поступает на требуемые тиристоры первой фазной тиристорной группы преобразователя частоты 2. Одновременно сигнал ЛОГ.. О со второго выхода триггера 47 через блокировочный вход блока блокировки
54поступает на вторые входы его внутренних элементов И, препятствуя тем самым поступлению импульсов управления на тиристоры второй фазной тристорной группы преобразователя частоты 2. Если должна работать вторая фазная тиристорная группа, в триггер 47 записывается информация, при которой на его первом выходе появляется сигнал ЛОГ.О, а на его втором выходе соответственно ЛОГ.1. При этом импульс управления с определенного выхода цифровой системы импульсно-фазового управления 46 через соответствующий элемент И блока блокировки 54 по- ступает на требуемые тиристоры второй фазной тиристорной группы преобразователя частоты 2. Тем временем сигнал ЛОГ О, поступающий
с первого выхода триггера 41 на блокировочный вход блока блокировки 53,препятствует поступлению импульсов управления на тиристоры первой фазной тиристорной группы преобразователя частоты 2. На следующих интервалах дискретности цифровой распределитель импульсов 16 работает подобно описанному.
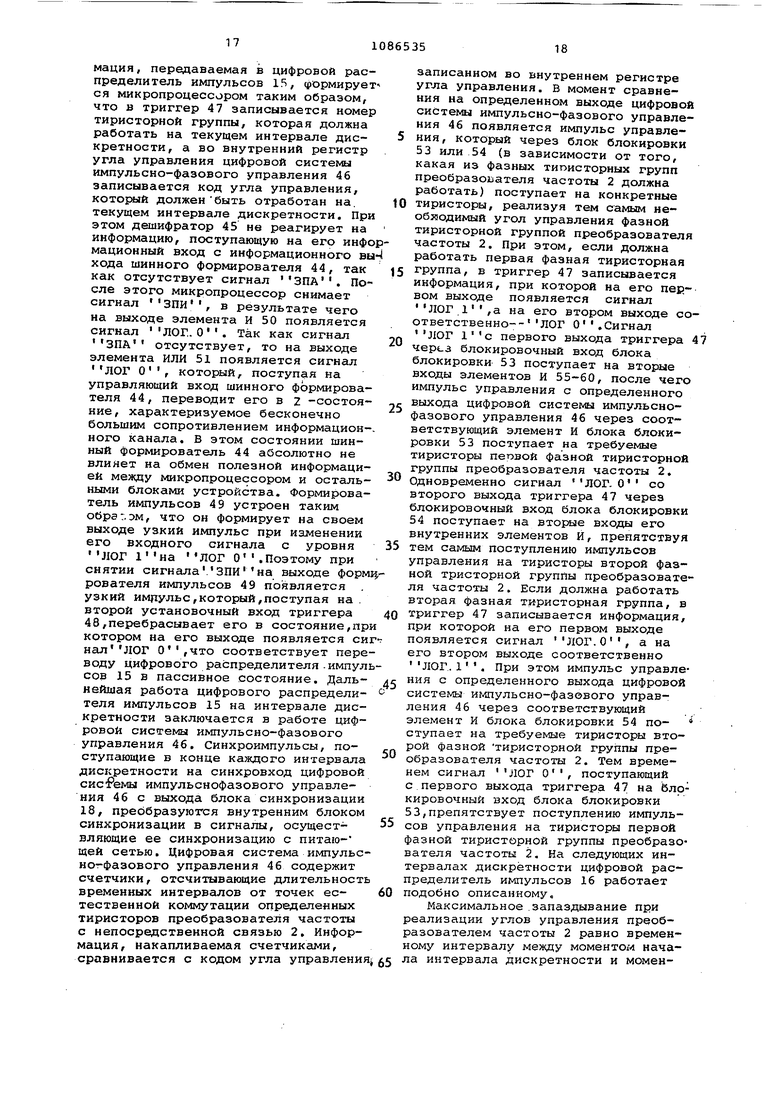
Максимальное .запаздывание при реализации углов управления преобразователем частоты 2 равно временному интервалу между моментом начала интервала дискретности и моментом записи значений углов управления во внутренние регистры цифровых распределителей импульсов 15,16 и 17. В предлагаемом устройстве это запаздывание равно si 1 эл. град. и практически не ухудшает динамические качества . После записи ьначений углов управления преобразователем частоты 2 во внутренние регистры цифровых распределителей импульсов 15,16 и 17 микропроцессорная система управления приступает к под4.отоВ iке информации, необходимой для расчета углов управления преобразователем частоты 2 на м+2-м интервале дискретности. При этом микропроцессор 12 начинает выполнять подпрог.рамму Кооректировка параметров. Подпрограмма Корректировка параметров предназначена для корректировки знс.чений активных сопротивлений статора и ротора, величина которых существенно изменяется при /гзменении температуры электродвигателя 1 . Блок-схема алгоритма, реализованного в подпрограмме Корректиро ка параметров, показана на фиг. 4 Выполняя эту подпрограмму, микро процессор 14 определяет расчетные значения усредненных электромагнитн управляемых-координат электродвигат 1 усредненных фазных токов статор и потокосцепления ротора на истекшем п-м интервале дискретности, реализуя при этом следующие выраженияXpCnJ KCn-fj+B FCn-IIte FM, (1 статора) на п-м интервале А-матрица- коэф . фицкентов раз мерностью 5x5; матрица коэффи циентов размер ностью 5x3. В правую часть выражения (7) входят истинные значения усреднен ных электромагнитных управляемых и управляющих координат электродвигателя, считыва91иа 1е с выходов интегральных аналого-цифровых преобразователей 19-26, в началеtкаждого интервала дискретности. Компоненты матриц А,В Bj зависят как от параметров электродви- гателя 1, так и от усредненной скорости вращения ротора на п-1-м интервале дискретности . Упомянутые компоненты рассчитывгиотся на предшествующем h-м интервале дискретности при выполнении подпрограммы расчета коэффициентов(см.ниже), После этого микропроцессор осуществляет расчет суммарного среднеквадратичного отклонения реальных значений усредненных управляемых электромагнитных координат электропривода от их расчетных значений. Суммарное среднеквгщратьчное отклонение определяется на М контрольных интервалах дискретности М Г е ,JS(ipW- Wf fCn ,2 к т.д. Если М контрольных-интервалов не истекли,.то содержимое счетчика интервалов fin увеличивается на единицу, после чего микропроцессор заканчивает :выполнение подпрограммы Корректировка параметров. На последующих интервалах дискретности он продолжает определение расчетных значений усредненных управляемых электромагнитных координат по выражению (7) и расчет суммарного среднеквадратичного отклонения по выра- жению (8). На последнем из М контрольных интервалов дискретности микропроцессор заканчивает расчет суммарного среднеквадратичного отклонения Qfj , после чего по значению параметра & проверяет, находится ли система управления в режиме корректировки параметров. Если система управления не находится в режиме корректировки параметров, т.е. -, f 1, то микропроцессор проверяет, удовлетворяет ли рассчитанное суммарное среднеквадра- тичное отклонение Q i требуемой степени точности Е. Если да,|ТО.ечетчик интервалов устанавливается в исходное состояниеf n+lj 1, после чего микропроцессор заканчивает выполнеКорректировкание подпрограммы параметров. Если степень точности не удовлетворена, ..т.е. , то параметру присваивается значение единицы 1, чтоформально соответствует переводу системы «управления в режим корректировки параметров. После этого микропроцессор осушествляет коррекцию расчетных значений сопротивлений статора., ротора г. В случае если система управления уже находится в режиме корректировк параметров, т.е., иг, то микропро1ессор 14 осуществляет коррекцию расчетных значений сопротивлений Гд иГрбез проверки удовлетворения суммарного среднеквадратйч ого отклоне ния 6С}3 требуемой степени точности. При этом реализоэзв алгоритм кор рекции расчетншс значений сопротивл ний Гд и Гр методом миниьшзации сумма ного среднеквадратичного отклонения ЙГ|3 . В режиме ко{фектировки параме ров микропроцессор осуществляет коррекцию расчеушах значений сопротивлений Гд и г после каждаах М контрольных интервалов. Процесс кор рекци«1 продолжается до тех пор, пок значение суммарного среднеквадратичного отклоненияйЙ}не достигает свое го минимального значения. При этом расчетные значения сопротивлений Гд иг оказываются максимально приближенными к реальным значениям сопротивлений статора и poTojja, а минимальное значение суммарного среднеквадратичного отклонения практически определяется только допущениями, сделанными при синтезе дискретной конечноразностной модели элёктропри вода переменного ток а, выраженной разностными матричными уравнениями ( Алгоритм построен таким образом, что после окончания процесса коррек ции параметру 6 присваивается значе ние отличное от единицы,т,е6# 1, что формально соответствует выходу системы управления иа режима корректировки параметров. Причем требуемая степень точност Е выбирается из условий неполной адекватнсйзти процессов, описываемых разностными уравнениями (7) процессам, протекающих в реальном электро приводе переменного тока, а также допустимых отклонений расчетных значений сопротивлений статора йги ротора л г,, от их реальных значений, при которых качество динамических процессов в предлагаемом устройстве является удовлетворительным. Поэтог так как разница между скорректирован ными расчетными значениями сопротивлен | статора и ротора и их реальными значениями существенно меньше допустимых отклонений лГд и дг , то Минимальное значение суммарного среднеквадратичного отклонения всегда удовлетворяет требуемой степени точности, T.e.flCiJ min Очередной режим корректировки параметров начинается тогда, когда в результате изменения температуры, электродвигателя 1 отклонения между расчетными и реальными значениями сопротивлениями статора и ротора превысят допустимые отклонения и, соответственно, cyiviMapHoe среднеквадратичное отклонекие выходит за пределы требуемой: степени точности. Количество контрольных интервалов М выбирается достаточно большим, чтобы получить хорошее усреднение квадратичного отклонения. Так как современные итерационные методы минимизации -характеризуется быстрой сходимостью и длительность интервала дискретности преобразователя,частоты мала, то процесс коррекции сопротивлений TS и г происходит значительно быстрее, чем сам процессизменения сопротивлений под воздействием температуры. После окончания подпрограммы Корректировка параметров микропроцессор 14 начинает выполнять подпрограмму Расчет коэффициент TOE. По этой подпрограмме микропроцессор рассчитаавает коэффициенты, используемые в дальнейшем при выполйении подпрограмм Формирователь траектории движения, Регулятор усредненных токов статора и потокосцеплений ротора и Корректировка параметров. Коэффициенты условно разбиты на две группы: в первую входят коэффициенты., зависящие только от параметров электродвигателя I, а во вторую - коэффициенты, зависящие также и от усредненной: скорости вращения ротора ( Подпрограмма .Расчет коэффициентов построена таким образом, что если , после выполнения подпрограммы Кор- , ректировка параметров происходит корректировка значений сопротивлений статора и ротора г и Гр , то рассчитываются коэффициенты, входящие в обе упомянутые группы. Если же корректировка сопротивлений не произошла, то осуществляется расчет коэффициентов, входящих только во вторую группу, а значения коэффициентов п.ервой групды остаются неиз- . манными. Значения вновь рассчитанных коэффициентов записываются микропроцессором в соответствующие ячейки блока памяти 13. После этого микропроцессор 14 заканчивает выполнение гюдпрограммы Расчет коэффициентов и начинает выполнять подпрограмму Формирователь траек- тории движения, Выполняя эту подпрограмму, микропроцессор осуществляет расчет требуемого усредненного скольжения, которое должно поддерживаться на h +1-М и n+2-M интервалах дискретности для обеспечения требуемого момента электродвигателя 1. рк( з п+23-й)пЗ|/К Исли расчетное значение усредненного скольжения ш-., превышает допусL-(4. . .... тимое, то производится его ограничение и соответственно корректиров ка задания усредненной СКОРОСТИ ротора uJjC +2 .После этого осущес .ляется расчет требуемого углового положения усредненного вектора пот Косцепления ротора на rv+2-м интервале дискретности относительно оси фазы А статоь-а Л(.,,,)Г„; . Определяется требуемая усреднен ная скорость вращения усредненного вектора потокосцепления ротора на п +2-М интервале дискретности ПзС 23 СОзСп+2 + ш.| .- (1-i В дальнейшем микропроцессор 14 осуществляет расчет требуемых составляющих уЪредненных векторов тока и напря;: ёния статора на г +2-м интервале дискретности в системе координат, одна из осей которых совпадает сусредненным вектором Ьотокбсцепления ротора.Расчет упом нутых составляющих осуществляется из условий поддержания модуля усред ненного вектора потокосцепления в процессе регулирования постоянным т.е. IУ)п Yf. conrt . U,,V S23Cn 2 +K C K5Wj nt2); ,Q,,.2ju.K,); ; Т rn 23«XgV ; TgCfttZJrKgVf-UJ Коэффициенты зависят тольк от параметров электродвигателя 1 и рассчитываются при выполнении подг программы Расчет коэффициентов, как упоминалось выше. . В выражениях (12) индексом обозначены проекции векторов на ось совпадающую с вектором усредненного вектора потокосцепления ротора, а проекции усреднениндексомных векторов на ортогональную ей ось. По значениям составляющих микропроцессор рассчитывает требуег-йде модули усредненных векторов тока и напряжения статора и их положение относительно усредненного вектора потокосцепления ротора на п 4-2интервале дискретности iU| n+23-yuJCn 2 O Cw23 i ; /iv,r 2 arccos(02Cn 23j}U{Cn 23), ,S. nt23r«rcco5(yn 2 ||ilht2) . Суммируя требуемое угловое поло жение усредненного вектора потокосцепления ротора на п+2-м интервс... дискретности +2 с величинами и р.п+2 , микропроцессор определяет требуемое угловое положение усредненных векторо тока и напряжения статора на п+2-м интервале дискретности относительно фазы А статора t/. rn-.-2 V Cn 2j ;Jirn 2ji 4, VyM fJyrn+2J. Раскладывая полученные требуемые усредненные вектора тока, напряжения статора и потокосцепления ротора по осям фаз статора микропроцессор определяет задания соответственно на усредненные фазные токи, напряжения статора и потокосцепления ротора на n+2-M интервале дискретности V - l 2Jcos{.) . Uj Cn jMOIгп 2 соз(); (), где А,В,С; 0, 2J7/3 ,. Полученные величины зсщания микропроцессор 14 записывает в соответствующие ячейки блока памяти 13, на этом подпрограмма Формирователь траекторий движения заканчивается, после чего микропроцессор начинает выполнять вторую часть подпрограммы Расчет отклонений, прерванной ранее (см. выше). Реализуя вторую часть упомянутой подпрограммы, микропроцессор рассчитывает отклонения между заданными электромагнитными управляемыми координатами электродвигателя 1-усредненными фазными токами статора и потокосцепяениями ротора и их реальными значениями на истекшем п-м ин.сервале . дискретности . где ,B,C (вычисление Д дх-О Зосуществляется только для /u.f:R,B ). Рассчитанные значения отклонений микропроцессор 14 записывает в соответствующие ячейки блока памяти 13. Не} этом подпрограмма Расчет отклонений: заканчивается и микропроцессор начинает выполнять вторую часть подпрограммы Регулятор усредненных токов статора и потокосцеплений ротора, прерванную ранее (см. вьпие) . Выполняя вторую часть программы, микропроцессор 14 регшизует выражение (3), подготавливая информацию для расчета корректируквдих добавок к заданию на фазные напряжения статора на n+2-M интервале дискретнос Jr-iL° Рассчитагные значени wlNiieW.tW- KponiJOueccop записывает в соответствующие ячейки блока памя ти 13. После этого работа микропроцессорной системы управления на п +1-М интервале .дискретности закан чивается. С приходом очередного синхроимпульса с выхода блока синхронизации 18 на вход синхронизации 33, свидетельствунадего о начале п+2-го интервала дискретности, микропроцессорная система управления начинает работать аналогично. Микропроцессорная система управления в частотно-управляемом электроприводе переменного тока работае по тактам, совпадающим с интервалами дискретности преобразователя частоты 2. Управление осуществляетс по усредненным на интервале дискрет ности управляющим (напряжения статора) и управляемым (токи статора, потокосцепления и скорость ротора) координатам электропривода перемени, ного тока. Вырабатываемые системой управления требуемые усредненные напряжения статора однозначно реали зуются на каждом интервале дискретности путем отработки соответствующих углов управления преобразоватег лем. Все это позволяет,во-первых, полностью учесть дискретность преобра-. эвателя частоты 2 и реализовать предельное быстродействие предлагаемого устройства,исключив при этом возможность вoзникнojseния субгармонических колебаний; ви-вторых, обеспечить высокую помехозащищенность предлагаемого устройства. При этом повышается точность регулирования скорости вращения электродвигателя 1. Система управления вырабатывает управляющие воздействия один раз на каждом интервале дискретности затрачивая на это только часть интервала. Наличие свободного времени на интервале дискретности дало возможность осуществить в электроприводе корректировку коэффициентов настройки системы управления при изменении (под воздействием температуры) сопротивлений статора и ротора электродвигателя 1. При этом также повышается точность регулирования скорости вращения асинхронного двигателя 1. Кроме того, введение в электропривод обратных связей по усредненным на интервале дискретности напряжениям, статора, обладающими высокой помехозащищенностью, позволяет осуществить корректировку коэффициентов настройки системы управления без непосредственного измерения температуры электродвигателя 1. Цифровые блоки частотно-управляемого электропривода Переменного тока выполнены на базе элементов серии К 589,КР 1802,К 155. Таким образом, введение в частотно-управляемый электропривод переменного тока с микропроцессорным управлением цифровых фазных распределителей импульсов, блока синхронизации, интегральных аналогоцифровых преобразователей и соответствуюее их выполнение, а также датчиков азных напряжений и потокосцеплений обеспечивает его высокие динамичесие показатели, в широком диапазоне температур и высокую точность регуирования скорости вращения асинронного двигателя с короткозамкнуым ротором в сравнении с известым электроприводом.
С Гатчина моггрлжениЯ 28
-r, I
4
l Т
.ЖЬ fl Ж .11 Т.ШИШшЛ,
3
Г...1
Cetitsoffa /f untpa f aifuofft oMtf ffana- I С t/rrpaS fotuffO
/fi/3 ffue pf/nH9f6
HQ ct/ fpovaзоции /S fiivt/fJfu/rrf в
H«.
fb/ro/a Ш ffufffpfm ffoeo ettwe i//rrfjf/g
.Z & eMxoaaJ o на cuHxpoffi st tfUU fO /rtfM0offMai( /foHoffyS fft/cffflejf Mpfo &ы ислите Я f /f ВхоЗу ynftafjffHUj) apffffpoyoSomfaji aemo/nAtl С упраёляюи еео ffA/) Ю ffucftflenfffogo 8ir/vucjrtfme/3Jf 8 cf3uff.3
&6ivttc/teffue XpffiJ
Bin числе Ifae fffjj
Mffn -H
ejKcpa7nf4 нврренива ftaei/ffm tx 3tfaffetf fU co/fpoffTttSfretf(/3 /s tf /
f fT4lJzi
Г...
фиеЛ
Начало по программы,, /fappfffmapfSiHt /юраметров
ffOHflf
ао0/7роераг4НЫ
, H9/oflfftmt/pofffti
aopaf«fffrpoS
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дацковский Л.Х., Тарасенко Л.Н., Кузнецов И.О., Бабичев Ю.Е | |||
| Синтез систем подчиненного регулирований в асинхронных электроприводах | |||
| -Электричество, 1975, № 9 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
