(54) УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СКОЛЬЖЕНИЯ
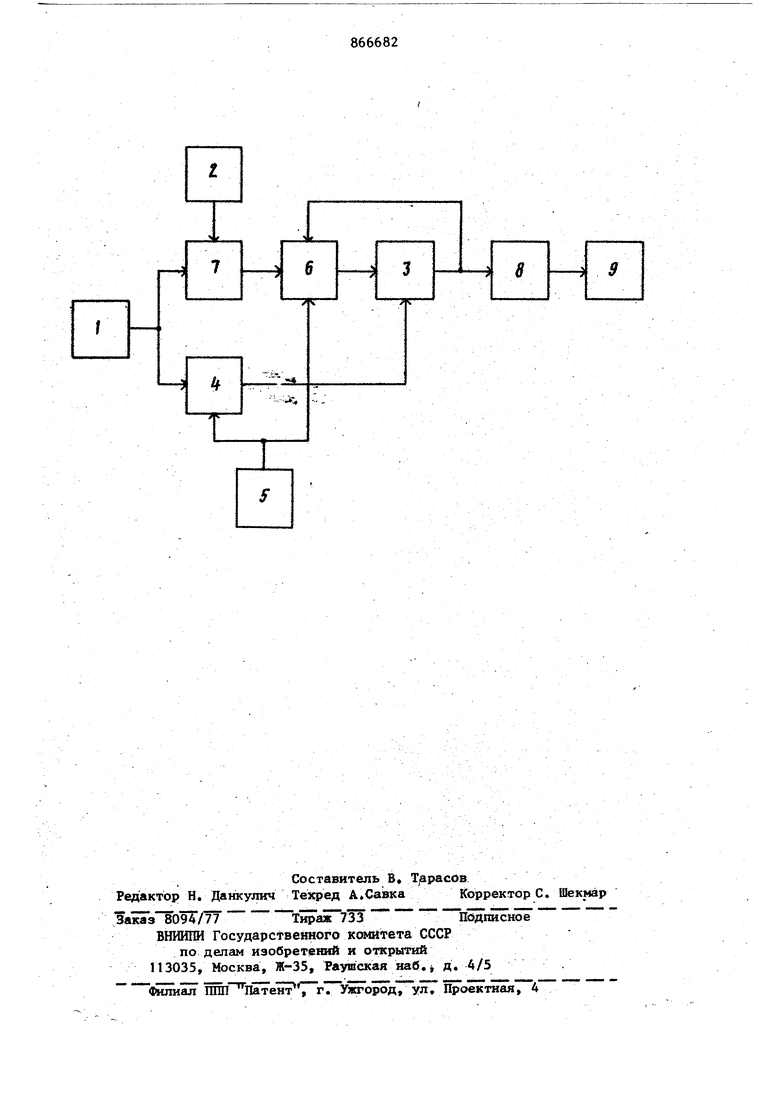
АСИНХРОННОГО ДВИГАТЕЛЯ В ЧАСТОТНОРЕГУЛИРУЕМОМ Изобрет.ение относится к электротехнике и может использоваться для формирования абсолютного скольжения в электроприводах с вентильньии преобразователями частоты и дискретными датчиками скорости. Известно устройство для формирования абсолютного скольжения асинхронного двигателя в частотнооег лируемом электроприводе, содержащее дискретный датчик скорости, генератор, частоты скольжения, дискретный сумматор частот, входы которого подключены к генератору частоты скольжения и к дискретному датчику скорос ти. Устройство позволяет обеспечить точное регулирование скольжения машины ПЗ. Однако последовательность импульсов, образуемая в результате дискрет ноге алгебраического сложения частот сигналов датчика скорости и геиератора частоты скольжения, оказывается в принципе неравномерной, что при ЭЛЕКТРОПРИВОДЕ водит к возникновению неравномерности межкоммутационного интервала инвертора и, как следствие, к снгшекию качества работы привода. Наиболее близким по технической сущностик предлагаемому изобретению является устройство для формирования абсолютного скольжения в частотнорегулируемом электроприводе с блоком управления инверторс 4, содержап(ве дискретный датчик скорости, формирователь частоты скольжения дискретный сумматор-частот, вычислительный блок, компаратор и блок интеграторов , работанвцее по принципу коррекции межкоммутационного интервала, формируемого дискретным сумматоре частот.. Устройство позволяет регуля-г ровать абсолютное скольжение машины, исключая при этом неравномерность га 1ходной частоты преобразователя. Точность формирования скольжения этим устройством .определяется точ- ностыб ш гчисления относительного времени коррекции межкоммутационного интервала инвертора, которое вычисляется аналого-цифровым вычислительным блоком в соответствии с выражетем fe. - , К.-П1-Д - относительное время коррекции межкоммутационного интервала; m - число импульсов формирователя частоты сколд жения, приходящих в течение одного межкоммутационного интервала инвертора5 К-коэффициент деления частоты -. - в дискретном сумматоре частот . нки й-:г-дробная часть отношения длительности межкоммутационного интервала инвертораТщцИ периода частоты скольжения. Таким образом, вьшислительный блок выполняет операцию деления двух переменных величин 23. Однако зфи этом возникает погрешность вычисления €. , что приводит к ошибке при формировании абсолютного скольжения. Цель изобретения - повышение точности формирования абсолютного сколь жения. Поставленная цель достигается тем что в устройство, содержащее дискрет ный датчик скорости, формирователь частоты скольжения и компаратор, вве дены блок вычисления периода частоты дискретного датчика скорости, генератор опорной частоты, цифровой интегратор, делитель частоты и блок вы числения относительной выходной частоты преобразователя, первый вход которого подключен к выходу цискретного датчика скорости, второй вход к выходу формирователя частоты сколь жения, а выход - к первому входу цифрового интегратора, второй вход которого подключен.к выходу генерато ра опорной частоты, а выход - к первому входу компаратора, второй вход которого подключен к выходу блока вычисления периода частоты дискретного датчика скорости, первый вход которого подключен к выходу дискретного датчика скорости, а второй-вход к выходу генератора опорной частоты, причем выход компаратора подключен к соответствующему входу цифрового интегратора и через делитель частоты 8 4 вязан с входом блока управления астотой преобразователя. На чертеже представлена функциоальна схема устройства ддтя форми-овашся скольжения. Устройство содержит дискретньй атчик 1 скорости, формирователь 2 астоты скольжения, компаратор 3, лок 4 вычисления периода частоты искретного датчика скорости, генераор 5 опорной частоты, цифровой инегратор 6, блок 7 вычисления отноительной выходной частоты преобраователя, делитель 8 частоты, блок управления частотой преобразоватея. Устройство работает слеАую11р м образом. Частота импульсов на выходе дискретного датчика 1 скорости равна 2) AAc-(iar гдеQ - скорость вращения двигателя; Z - разрешающая способность дискретного датчика скорости, имп/об, На выходе формирователя 2 частоты скольжения образуется импульсная последовательность, частота которой фис-23Г ь 4 мс I гдедС2 заданная величина абсолютного скольжения, СГ | фис коэ фициент передачи формирователя частоты скольжения. Импульсный сигнал с выхода дискретного датчика 1 скорости, также как и сигнал с выхода формирователя 2 частоты скольжения,подается на вход блока 7 вычисления относительной выходной частоты преобразователя. На выходе блока формируется код числа М,Чис: «Фие-ГдАс Фио(41). (4) период выходной частоты дискретного датчика скорости ; относительная выходная частота преобразователя, причем знак плюс соответствует двигательному режиму работы а минус - ген . раторному. Этот код подается на вход цифров го интегратора 6, на второй вход ко торого подается опорная частота f с генератора 5 опорной частоты. Код на выходе интегратора 6 пропорционален относительной выходной tac тоте преобразователя и линейно воз растает в функции времени .Nr04M где t - текущее время. Выходной сигнал интегратора подается на первый вход компаратора 3 На соответствующие входы блока 4 вычисления периода частоты дискре ного датчика 3. скорости поступает Частота f с генератора 5 опррной частоты и частоты ддс. выхода дагскpiBTHoro датчика 1 скорости. Н.а выход блока формируется код числа м -И 1 -Т ) . Q О который подается на второй вход ком ратора 3. В момент равенства кодов Мп и на выходе компаратора 3 формируется импульс, который подается через дели тель 8 частоты на вход блока управления частотой преобразователя. Выходной импульс компаратора поступает также на соответствующий вход цифрового интегратора и устанавливает его в нулевое состояние. Затем процесс интегрирования повторяется. Таким образом, на выходе компарат ра 3 формируется последовательность импульсов, период Т к следования готорых можно найти, приравняв правые и левые части выражения СЗ) и (6) Т- (7) k-Z QtuQs С выхода компаратора 3 последовательность импульсов через делитель 8частоты поступает на вход блока 9управления частотой преобразователя. Частота f,, на выходе делителя ,, частоты определяется следукяц ш выражением:), ЧЧ Тк - коэффициент деления делителя частоты ; Р - число пар полюсов двигателя. В предлагаемом устройстве при формировании абсолютного скольжения не используется операция деления, что позволяет повысить точность его формирования.При этом неравномерность выходной частоты преобразователя отсутствует, что повышает равномерность вращения асинхронного двигателя. Формула изобретения Устройство для формирования скольжения асинхронного двигателя в час-тотнорегулируемом электроприводе с блоком управления частотой преобразователя, содержащее дискретный датчик скорости, формирователь частоты скольжения и компаратор, отличающееся тем, что, с целью повышения точности формирования скольжения, в него введены блок вычисления периода частоты дискретного датчика скорости, генератор опорной частоты, цифровой интегратор, депиг тель частоты и блок вычисления относительной выходной частоты преобразователя, первый вход которого подключен к выходу дискретного датчика скорости, второй вход - к выходу формирователя частоты скольжения, а выход - к первому входу цифрового интегратора, второй вход которого подключен к выходу генератора опорной частоты, а выход - к первому входу компаратора, второй вход кото рого под1слючеи к выходу блока №tчяслеакя периода частоты дискретноГо датчика скорости, первьш вход которого подключен к выходу дискретного датчика скорости, а второй вход - к выходу генератора опорной частоты, причем выход компаратора подключен к соответствующему входу цифрового интегратора и через делитель частоты связан с входом . блокауправления частотой преобразователя. Источники информации, принятые во внимание при экспертизе 1, Савдлер AiC, и др. Реверсивный тиристорный асинхронный эл§ктропривод с цифроаналоговым управлением. Труды ЮИ Автоматизированный элект ропривод, 1977, вып.325, М. 2. Авторское свидетельство СССР по заявке № 276 983/07 кя. Н 02 Р 7/42, 1978,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1981 |
|
SU989732A1 |
| Устройство для формирования абсолютногоСКОльжЕНия АСиНХРОННОгО дВигАТЕляВ чАСТОТНО-РЕгулиРуЕМОМ элЕКТРОпРиВО-дЕ | 1979 |
|
SU828355A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для управления асинхронным двигателем | 1980 |
|
SU921018A1 |
| Дозирующая система сеялки | 1985 |
|
SU1329649A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1121691A1 |
| Асинхронный электропривод | 1989 |
|
SU1697252A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |