ел
00
сх
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многоканальным электроприводом тренажера | 1984 |
|
SU1180846A1 |
| Вентильный электродвигатель | 1986 |
|
SU1818664A1 |
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| Вентильный электропривод | 1990 |
|
SU1767688A1 |
| Вентильный электропривод | 1989 |
|
SU1721776A1 |
| Вентильный электропривод | 1985 |
|
SU1356171A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
| Вентильный электродвигатель | 1980 |
|
SU964882A1 |
| Вентильный электропривод | 1990 |
|
SU1772885A1 |
Изобретение относится к электротехнике, в частности к вентильным электроприводам, и может быть использовано в широкодиапазонных прецизионных системах электропривода. Целью изобретения является повышение качества стабилизации частоты вращения в широком диапазоне регулирования путем улучшения организации широтно-импульсной модуляции. Синхронный электродвигатель 1 стабилизированного вентильного электропривода с комбинированным устройством разгоняется до момента времени, когда частотный компаратор 13 определит, что частота вращения больше допустимой, определяемой величиной продольного скольжения полей ротора и статора, при котором электродвигатель 1 может еще втянуться в синхронизм. На тактовый вход модулятора 15 через мультиплексор 5 поступают импульсы с выхода блока 8 коррекции, и синхронный электродвигатель 1 переводится из режима вентильного электродвигателя, работающего по сигналам датчика 2 положения ротора, в синхронный режим традиционной синхронной машины. При этом стабилизация частоты и фазы вращения синхронного электродвигателя осуществляется фазовым способом путем изменения фазы напряжений преобразователя частоты. 2 ил.
. 1
3
16
Изобретение относится к электро- т«хнике, в частности вентильным электроприводам, и может быть использовано в имрокодиапаэонных прецизионных системах электропривода.
Целью изобретения является повышение качества стабилизации частоты вращения в широком диапазоне регулирования путем улучшения организации шйротно-импульсной модуляции.
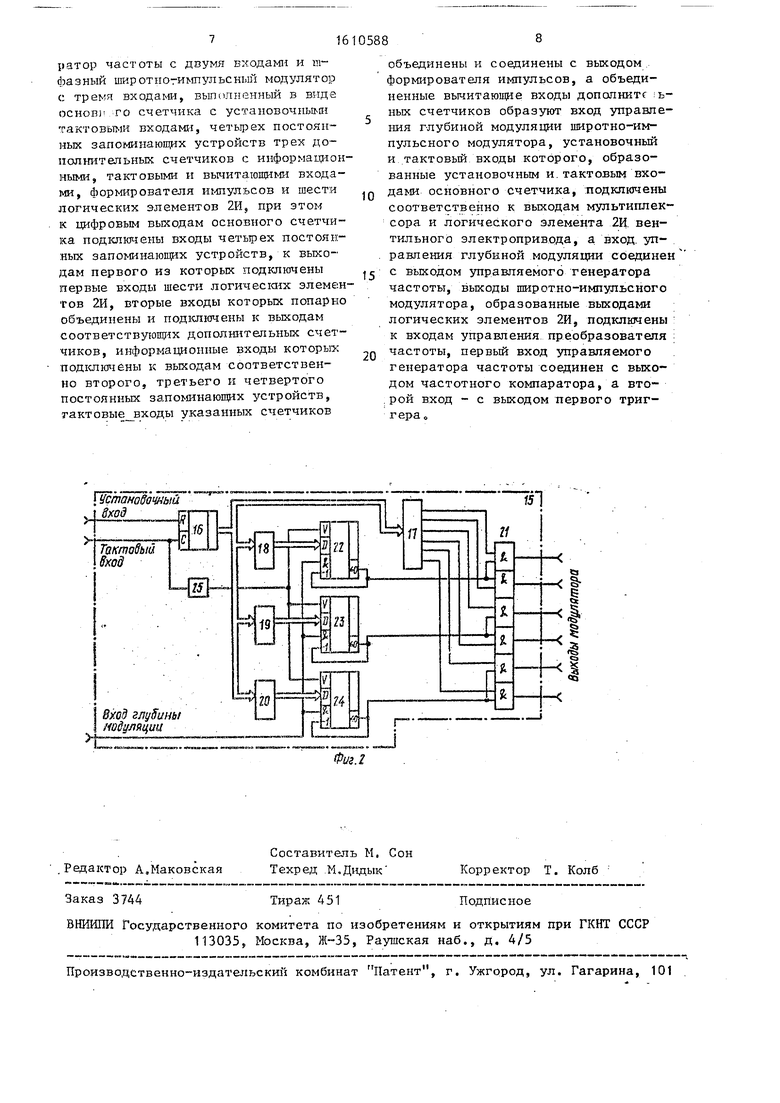
На фиг. 1,представлена структурно функциональная схема стабилизированного вентильного электропривода с комбинированным управлением; на фиг. 2 - принципиальная схема т- фазного широтно-импульсного модулятора о
Стабилизированный вентильньй электропривод с комбинированным управлением содерясит т-фазный синхрон- ньш электродвигатель 1 (фиг 1), с валом которого механически связаны датчик 2 положения ротора и датчик 3 частоты вращения, а якорная обмотка подключена к выходам преобразо- . вателя 4 частоты, мультиплексор 5 с пятью входами, первый информацион- ньш вход которого подключен к выходу датчика 3 частоты вращения, второй информационный вход через делитель
6частоты подключен к выходу генератора 7 опорной частоты, а третий информационный вход через блок 8 коррекции подключен к выходу фазового дискриминатора 9, первый вход которого подключен к выходу генератора
7опорной частоты, а второй - к вы- х:оду датчика 3 частоты вращения о Вход п ервого триггера 10 подключен к выходу фазового дискриминатора 9 а выход соединен с вторым входом блока 8 коррекции, четвертым адресным входом элемента 2И 11, второй аход которого подключен к выходу датчика 2 положения ротора и соединен с выходом второго триггера 12, к выходу которого подключен пятый гщресньш вход мультиплексора 5с, Вхо частотного компаратора 13 подключен к выходу датчика 3 частоты вращения а выход - к первому входу управляемого генератора 14 частоты, второй вход которого подключен к выходу первого триггера 10, а выход - к вх ду управления глубиной модуляции т-фазного широтно-импульсного модул тора 15, второй тактовьй вход которого подключен к выходу логического
5
588
элемента 2И 11, а установочной вход - к выходу мультиплексора 5„
т-фазный широтно-импульсный модулятор 15 выполнен в виде основного счетчика 16 (фиг„ 2) с установочным и тактовым входами, к цифровым выходам которого подключены входы четырех постоянных запоминающих устройств
Q (ПЗУ) 17-20, к выходам первого из которых подключены первые входы шести логических элементов 2И 21, вторые входы которых попарно объединены и подключены к выходам соответственс но трех дополнительных счетчиков
22-24, информационные входы которых подключены соответственно к выходам второго 18, третьего 19 и четвертого 20 ПЗУ. Тактовые входы упомянутых
Q счетчиков объединены и подключены к выходу формирователя 25 импульсов, а объединенные вычитающие входы являются входом управления глубиной модуляции.
Стабилизированный вентильный электропривод с комбинированньм управлением работает следуюшдм образом.
При пуске на тактовый вход т-фазного щиротно-импульсного модулятора 15 через мультиплексор 5 подаются импульсы с выхода делителя 6 частоты При этом первый 10 и второй 12 триггеры находятся в нулевом состоянии и на обоих адресных входах мультиплексора 5 - логические нули
В этом случае сигналы управления преобразователем 4 частоты формируются модулятором 15 с частотой несколько ниже частоты приемистости синхронного электродвигателя 1. Ротор синхронного электродвигателя 1 начинает проворачиваться до момента появления импульса на выходе датчика 2 положения ротора, которьш переключает триггер 12 в единичное состояние и устанавливает модулятор 15 в начальное состояние„ При этом на тактовьй вход модулятора 15 через мультиплексор 5 подаются импульсы напряжения с выхода датчика 3 частоты вращения, частота которых повьш1а- ется по мере разгона электродвигателя 1. Синхронный электродвигатель 1 разгоняется до момента времени, когда частотный компаратор 13 опре- 5 делит, что частота вращения больше допустимой, определяемой величиной предельного скольжения полей ротора и статора, при котором электродвига0
5
0
45
50
51610588
тель 1 может еще втянуться в синхро
низм. При этом частота импульсов на выходе управляемого генератора 14 частоты повышается, что приводит к дискретному уменьшению глубины модуляции импульсов на выходах модулятора 15. Таким-образом обеспечивается грубая стабилизация частоты вращения электродвигателя при изменении напряжения питания, момента сопротивления и температуры окружающей ср еды.
В моменты времени, когда фазы частот на Выходе генератора 7 опорной частоты и на выходе датчика 3 частоты вращения совпадают, на выходе фазового дискриминатора 9 появляются импульсы, которые переключают тригге 10 в единичное состояние. По этому сигналу на выходе триггера 10 блокируется прохождение импульсов с датчика 2 положения ротора через логи- ческий элемент 2И 11 на установочный вход модулятора 15 и разрешается
прохождение импульсов с фазового дискриминатора 9 на вход блока 8 коррекции. На тактовый вход модулятора 15 через мультиплексор 5 поступают импульсы с выхода блока 8 коррекции и синхронный электродвигатель 1 переводится из режима вентильного электродвигателя, работающего по сигналам датчика 2 положения ротора, в синхронный режим тради1тонной син- хронной машиныо При этом стабилизация частоты и фазы вращения синхронного электродвигателя в синхронном режиме осуществляется фазовым способом, путем изменения фазы напряже- НИИ преобразователя 4 частоты.
Импульсы управления силовыми вентилями преобразователя 4 частоты формируются т-фазньм широтно-импульсным модулятором 15. По сигналу с датчи- ка 2 положения ротора счетчик 16 устанавливается в нулевое состояние и является счетчиком интервалов, на которые разбит период импульсов управления -вентилями преобразователя 4 частоты.
В ПЗУ 18-20 записаны, например, для случая синусоидальной формы ЭДС вращения, значения квазисинусоид для соответствующих фаз Число, записан- ное в i-ю ячейку памяти ПЗУ 18, 19 или 20, определяется путем округления до целых чисел вычисленного по формуле
31п и /2п
K1J 11
.Ш1/2п. г и-)(
72п-- 2п
5
0
д
5
0 0
5 0
где 1 - номер ячейки памяти ПЗУ, или номер интервала, илц текущее значение числа в счетчике 16;
2п - число интервалов за период (выбирается кратным числу фаз якорной обмотки); К - разность ПЗУ. Таким образом, за счет определенной организации работы ш-фазного щи- ротно-импульсного модулятора обеспечивается повьшение качества стабилизации частоты вращения в широком диапазоне регулирования.
Формула изобретения
Стабилизированный вентильный электропривод с комбинированным управлением, содержащий т-фазньп1 синхронный электродвигатель, с валом которого механически связаны датчики положения ротора и частоты вращения, а якорная обмотка электродвигателя под1слючена к выходам преобразователя частоты, мультиплексор с пятью входами, первый 113 которых подключен к выходу датчика частоты вращения, второй вход мультиплексора подключен через делитель частоты к выходу генератора опорной частоты, а третий вход через блок коррекции, снабжен- ньш вторым входом, - к выходу фазового дискриминатора, первый вход которого соединен с выходом генератора опорной частоты, а второй вход фазового дискриминатора - с выходом датчика частоты вращения, первый триггер, вход которого подключен к выходу фазового дискриминатора, а выход триггера соединен с вторым входом блока коррекции, четвертьп 5 входом мультиплексора и первым входом логического элемента 2И, второй вход которого подключен к выходу датчика положения ротора и к входу второго триггера, выходом соединенного с пятым входом мультиплексора, час- тотньш компаратор, входом подключенный к выходу датчика частоты вращения , отличающийся т ем, что, с целью повьЕиения качества ста- билизац1-1и частоты вращения в широком диапазоне регулирования путем улучшения организации широтно-импульсной .модулящш, введены управляемой генератор частоты с двушг входамн и т- фазный широтIIorи шyльcный модулятор с: тремя входами, выполненный в виде (5СНОВ) го счетчика с установочными тактовыми входами, четырех постоянных запоминающих устройств трех до- польштельных счетчиков с информащюн ными, тактовыми и вычитающими входами, формирователя имульсов и шести логических элементов 2И, нри этом к цифровым выходам основного счетчика подключены входы четьрех постоянных запоминающих устройств, к выходам первого из которых подключены первые входы шести логичес1шх элементов 2И, вторые входы которых попарно объединены и нодюночены к выходам соответствую1Щ-1х дополнительных счетчиков, информационные входы которых подключены к выходам соответственно второго, третьего и четвертого постоянных запоминающих устройств, гактовые входы указанных счетчиков
гпанова ый
Фиг.2
,
Редактор А.Маковская
Составитель М. Сон Техред .М.Дидык
Заказ 3744
Тираж 451
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
5
0
объединены и соединены с выходом формирователя импульсов, а объединенные вычнтающе входы дополните :ь- ных счетчиков образуют вход управления глубиной модуляции широтно-им- пульсного модулятора, установочный и тактовый входы которого, образованные установочным и. тактовым входами основного счетчика, подключены соответственно к выходам мультиплексора и логического элемента 2И. вентильного электропривода, а вход, равления глубиной модуляции соединен с выходом з равляемого генератора частоты, вькоды широтно-импульсного модулятора, образованные выходами логических элементов 2И, подключены : к входам управления преобразователя : частоты, первый вход управляемого генератора частоты соединен с выходом частотного компаратора, а вто- ,рой вход - с выходом первого триггера
,
Корректор Т. Колб
Подписное
| Устройство управления - фазным бесконтактным двигателем постоянного тока | 1978 |
|
SU782070A1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
