(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОТЕХНОЛОГИЧЕСКИМ КОМПЛЕКСОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления робототехнологическим комплексом | 1987 |
|
SU1413599A1 |
| Устройство для программного управления технологическими процессами | 1979 |
|
SU877476A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1296398A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство группового программного управления технологическими процессами | 1989 |
|
SU1663603A1 |
| ТРЕНАЖЕР КОЛЛЕКТИВА ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ | 1998 |
|
RU2176108C2 |
| Устройство для программного управления | 1982 |
|
SU1084739A1 |
| Устройство управления резонансным позиционным механизмом | 1987 |
|
SU1451646A1 |
| Устройство для обучения | 1983 |
|
SU1273974A1 |
| ВИРТУАЛЬНЫЙ МУЛЬТИМЕДИЙНЫЙ ТРЕНАЖЕР КОЛЛЕКТИВА ОПЕРАТОРОВ СИСТЕМЫ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ | 2003 |
|
RU2239234C1 |
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах управления робото-технологическими комплексами, обслуживающими основное технологичеокое оборудование.
Известны устройства для управления робото-технологическими комплексами, содержащие последовательно соединенные генератор тактовых импульсов, сл&лу совпадения, блок распределения импульсов, наборное поле, блок триггеров, блок усилителей, блок исполнительных реле и манипулятор
Эти устройства не имеют обратных связей по положению манипулятора и работают только по временному принципу.
Наиболее близким по технической сущности к изобретению является устрой- сгво, содержащее последовательно соед иенные пульт управления, программнологический блок, распределитель команд, блок управления и манипулятор, первый выход которого подключен к второму
входу программно-логического блока, а также блок задержки, вход которого со&динен с вторым выходом раопределитепя : команд, а выход - с третьим входом программно-логического блока, четвертый вход которого подключен к выходу генератора, а пятый вход - к первому выходу блока управления 2.
Недостайсмл устройства является то, что оно не позволяет обеспечить управл& trae глобальными nep stemegnsiMB манга1у лятора, формирование в распределенне команд на необходимую группу технологического оборудования, что сужает область применения устройства.
Цель изобретения - расширение облао ти применения устройства.
Цель достигается тем, чтр устройство содержит блек анализа состояния маш пулятора и управляемый коммутатор, первый вход которого соединен с вторым выходом блока управления, второй вход с выходом блока анализа состояния манипулятора, входом генератора и шестым
вхоцом программно-логического блока, а третьи входы - с выходами устройства, йходы которого подключены к первым выходам утфавляемого коммутатора, второй выход которого соединен с седьмым входом программно-логического блока, а вход блока анализа состояния манипулятора подключен к второму выходу манипулятора.
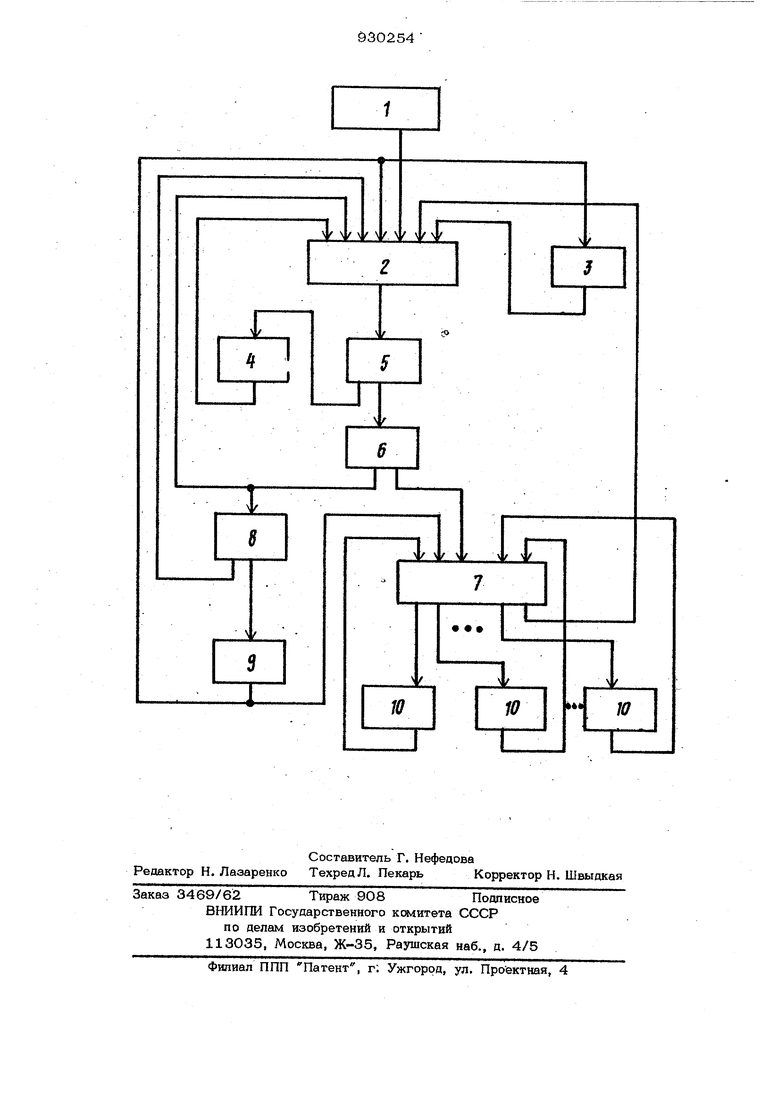
На чертеже представлена функциональная схема устройства.
Устройство содержит пульт 1 управлени з, программно-логический бпок 2, генератор 3, блок 4 задержки, распределитель 5 команд, блок б управления, управляемый котята тор 7, манипулятор 8, блок 9 анализа состояния манипулятора, технологическое оборудова- ние 10.
Устройство работает следующим образом.
Программа работы набирается и хранится в программно-логическом блоке 2 и включает в себя последовательность выполнения команд при отработке цикла, а также условия перехода от команды к команде внутри цикла. Такими условиями являются окончание выполнения заданной команды манипулятором 8 и состояние оборудования 10 перед выполнением манипулятором 8 последующей команды.
В исходном состоянии в распределителе 5 команд фиксируется код, в соответствии с которым через бпок 6 управлени устанавливается исходное состояние манипулятора 8. Одновременно блок анализа состояния манипулятора 9 определяет, у какой из групп технологического оборудования 1О находится манипулятор 8. Код позиции манипулятора 8 из блока 9 анализа поступает на вход управляемого коммутатора 7. В соответствии с этим кодом информация из блока 6 управления (в части, касающейся управления обору- довани€ 4 10) через управляемый коммутатор 7 поступает на нужную группу обс удования 1О, а также осуществляет ся ксяу1мутация датчиков этой группы оборудований 10 на вход программнологического блока 2.
При поступлении с пульта 1 управления команды Пуск в программно-логическом блоке 2 происходит выборка первой команды (команд) сох ласно алгорирму, определение необходимых для ее выполнения условий (по состоянию оборудования 10 и манипулятора 8), сравне4ше этих условий с истинным состоя-нием оборудования 10 и манипулятора 8 и при их совпадении выдача команды (команд) в распределитель 5 команд. Команда (команды) из распределителя 5команд через блок 6 управления управляет манипулятором 8, а через блок 6 и коммутатор 7 - необходимой группой оборудования 10.
После окончания выполнения команды, что определяет блок 2, происходит выборка очередной команды согласно алгоритму, определение необходимых для ее выполнения условий и. т. д. согласно циклу отработки программы. Если очередной ксмандой является команда на перемещение манипулятора 8 к очередной группе оборудования 1.0, то после записи ее в распределитель 5 команд блок 9 анализа производит анализ состояний датчиков положения манипулятора 8 и вырабатывает сигналы, поступающие на вход блока 2, где в соответствии с ними формируется набор команд, обеспечивающих заданный режим перемещения. При заверщении перемещения блок 9 анализа вырабатывает сигнал о том, что перемещение закончено, который поступает в блсж 3 и разрешает выборку очередной команды. Кроме того, в блоке 9 анализа определяется код позиции, в которую переместился манипулятор 8. Этот код поступает на управляемый коммутатор. 7, где в соответствии с поступивщщл кодом производится подключение к системе управления определенной группы оборудования 1О.
Устройство управления позволяет управлять органами манипулятора 8 и оборудования 10, не имеющими датчиков обратных связей. Коды команд, управляющих такими органами, с первого выхода распределителя 5 команд посту пают на блок 6 управления и далее на манипулятор 8, либо через коммутатор 7 на определенную группу оборудования Ю Одновременно со второго выхода распределителя 5 команд они поступают на входы блока 4 задержки, где с момента поступления на вход команды осуществляется отработка временного интервала, определяющего длительность отработки команды. После отработки временного интервала на выходе блока 4 задержки появляется сигнал, поступающий в блок 2 и указывающий на то, что данная команда выполнена (временной приицип формирования команды).
Устройство управления позволяет . иравлять оборудованием 10, имеющим J
свое (периферийное) устройство управления, для чего имеется возможность формировать команды, штределяющие начало отработки периферийным устройством управления своего цщсла. Для этого устройство управления формирует команды фиксированной длительности с определенной задержкой относительно какого-либо определенного момента времени.
С этой целью сигнал о завершении перемещения манипулятора 8 с выхода бло-ка 9 анализа поступает на ахоа генератора 3 и включает его. Выход генератора 3 соединен с входом блока 2, где в coopветствии с алгоритмом определяется требуемый м(4ент време.ни выработки ксмя№ды и формируется ее длительность.
Применение изобретения позволит осуществить управление манипулятором ори обслуживании им нескольких групп оборудования и управление этим обсфудованием.
Формула изобретения
Устройство для управления робототехнологическим ксжшлекс(%{, содержащее технологическое оборудование и последовательно соединенные пульт управления, программно-логический блок, распредеглитель команд, блок управления и манипулятор, первый выход которого подклк чен к второму входу программно-логического блока, а также блок задержки, вход которого соединен с вторым вь ходом распределителя команд, а выход - с третьим входом программно-логического блока, четвертый вход которого поен включен к выходу генератора, а пятый вход - к первому выходу блока управле 1НИЯ, отличающеес я тем, что, с целью расширения области примене(Ния устройства, оно содержит блок ана|лнза состояния манипулятора и управляемый кс 1мутатор, первый вход которого i соединен с вторым выходом блока управ:ле{тя, второй вход - с выкопом блока анализа состояния 1манипулятора, входом тенератора и шестым входом программнологического блсжа, а третьи входы - с выходами устройства, входы которого подключены к первым вь1ходам управляемого коммутатора, второй выход которог соединен с седьмым входом программнологического блока, а вход блока анализа состояния манштулятора подключен к второму выходу манипулятора.
Источники информации, принятые во внимание при экспертизе
с. 215-227.
