управления горизонтальным перемещением и к первому управляющему входу первого блока сравнения, соединенного первым информационным входом с вторьм выходом блока полупостоянной памяти, вторым управляющим входом 1124250 с вторым выходом блока формирования сиг-нала окончания цикла, вторым информационным входом - с вькодом датчика времени, а выходом - с входом пульта управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления автооператорами гальванической линии | 1981 |
|
SU969794A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Устройство программного управления линией гальванопокрытий | 1985 |
|
SU1339169A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство управления транспортными механизмами гальванической линии | 1986 |
|
SU1375689A1 |
| Система программного управления гальванической линией | 1986 |
|
SU1399382A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для циклового программного управления | 1984 |
|
SU1231488A1 |
| Устройство для программного управления | 1981 |
|
SU1029145A1 |
УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ РОБОТАМИ ГАЛЬВАНИЧЕСКИХ ЛИНИЙ, содержащее блок формирования сигнала окончания цикла, пульт управления, датчик времени и по числу роботов линии N каналов, каждый из которых состоит из формирователя адреса команд, соединенного первым командным входом с первым командным выходом блока формирования сигнала окончания цикла, вторым командным входом - с первым выходом пульта управления, треть-им командным входомс первым выходом блока отработки выдержек времени, четвертым командным входом - с первым выходом блока выделения синхрокоманды, командным ; выходом - с первым входом счетчика команд, стробирующим выходом - с первым входом блока постоянной памяти и с первым входом блока полупостоянной памяти, подключенного вторым входом к второму выходу ком14утатора программ, третьим входом - к первому выходу регистра команд, первым выходом - к первому входу блока отработки выдержек времени, связанного вторым входом с датчиком времени, третьим входом - с первым выходом блока управления горизонтальным перемещением, а вторым выходом - с первым входом блока управления вертикальным перемещением, соединенного вторым входом с датчиком вертикального положения, выходом - с исполнительным механизмом вертикального перемещения, а третьим входом - с вторым выходом регистра команд, подключенного входом к выходу блока постоянной памяти, третьим выходом - к первому входу блока управления горизонтальным перемещением, соединенного вторым входом с датчиком горизонтального сл положения, а вторым выхрдом - с исполнительньтм механизмом горизонталь ного перемещения, причем первый выход счетчика команд подключен к второму входу блока постоянной памяти, а второй выход - к первому входу блока выделения синхрокоманды, соединенного вторым выходом с входом блока формирования сигнала окончания hO fsD цикла, а вторым входом - с вторым выходом пульта управления, подключенного третьим выходом к входу ком:л мутатора программ, связанного-первым э выходом с третьим входом блока постоянной памяти, о.тличающееся тем, что, с целью повьппёния надежности устройства, в него введены датчик загрузки рабочих позиций и в каждый канал первый блок сравнения и второй блок сравнения, подключенный первым информационным входомк четвертому выходу регистра команд, вторьм информационным входом - к датчикам загрузки рабочих позиций, а выходом - к третьему выходу блока
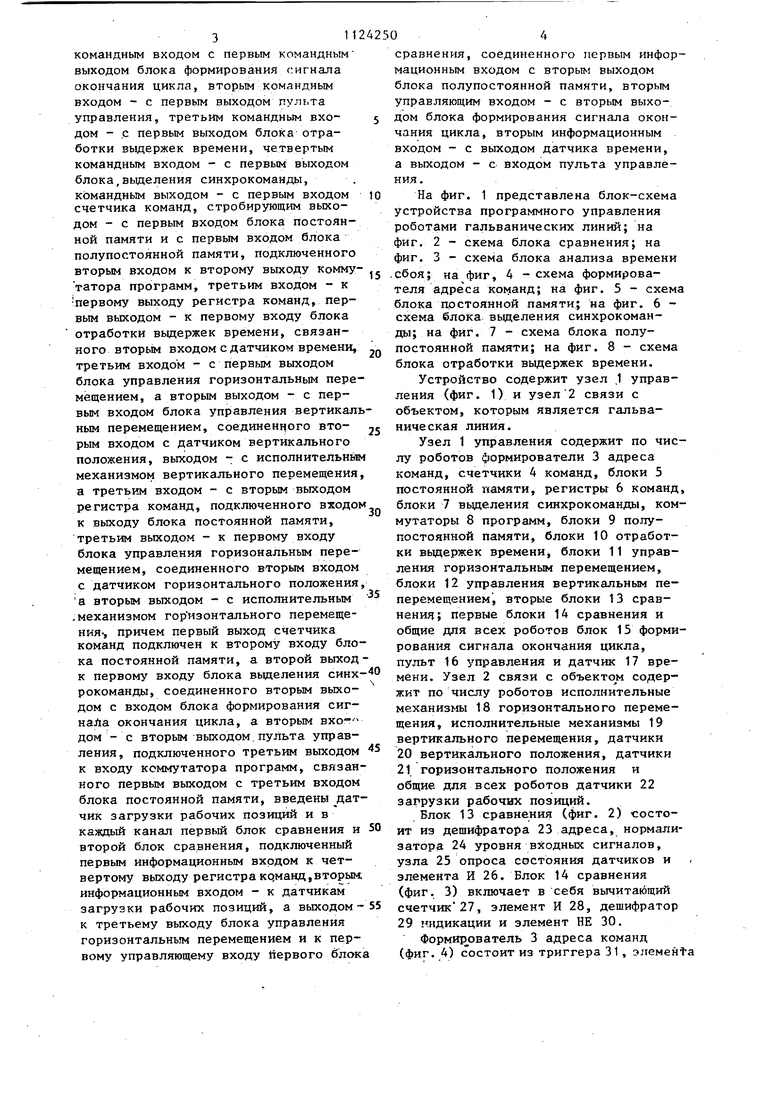
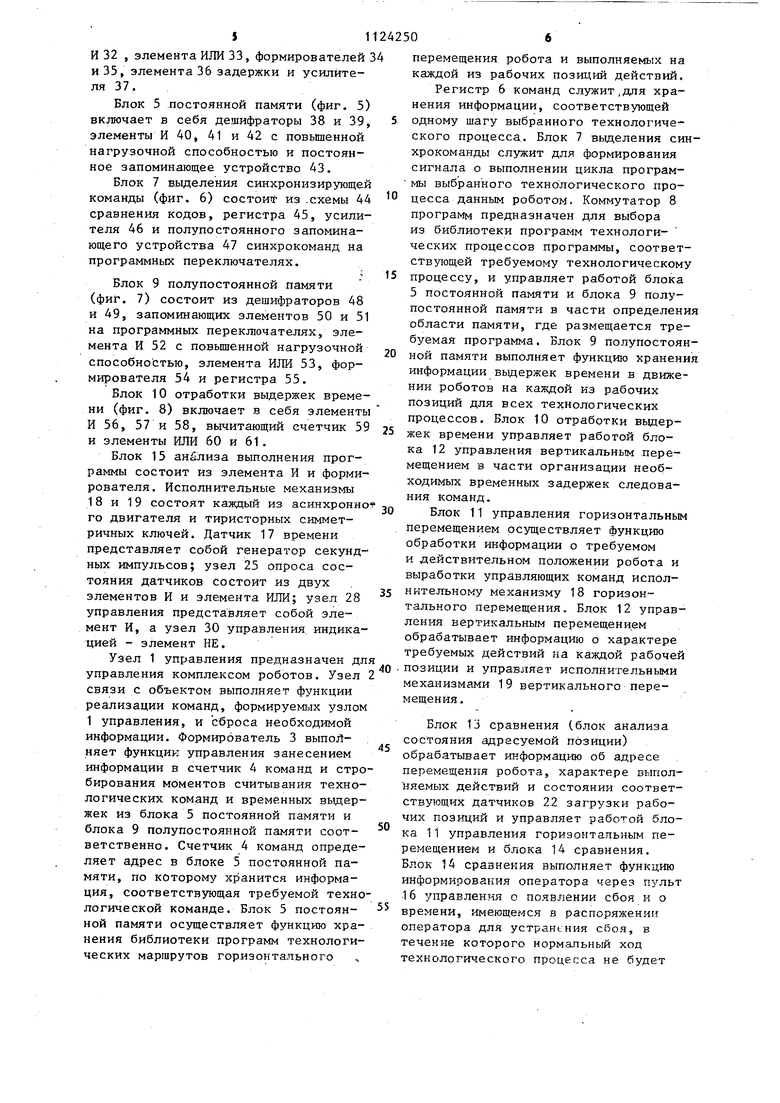
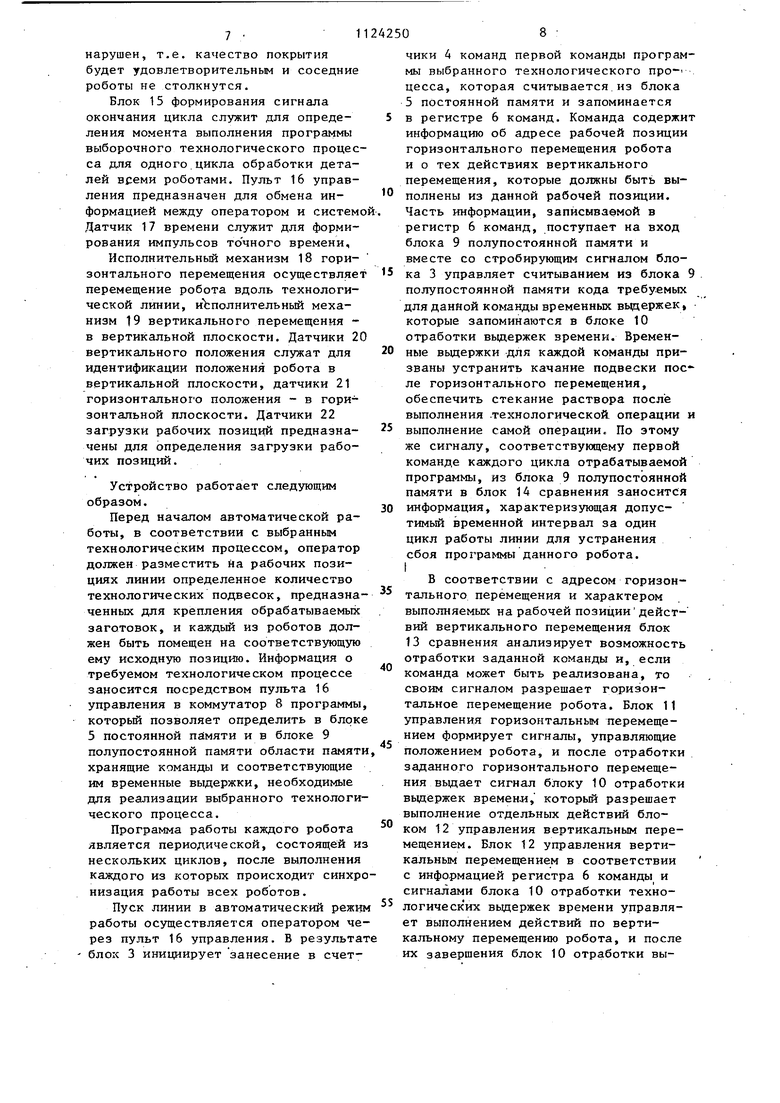
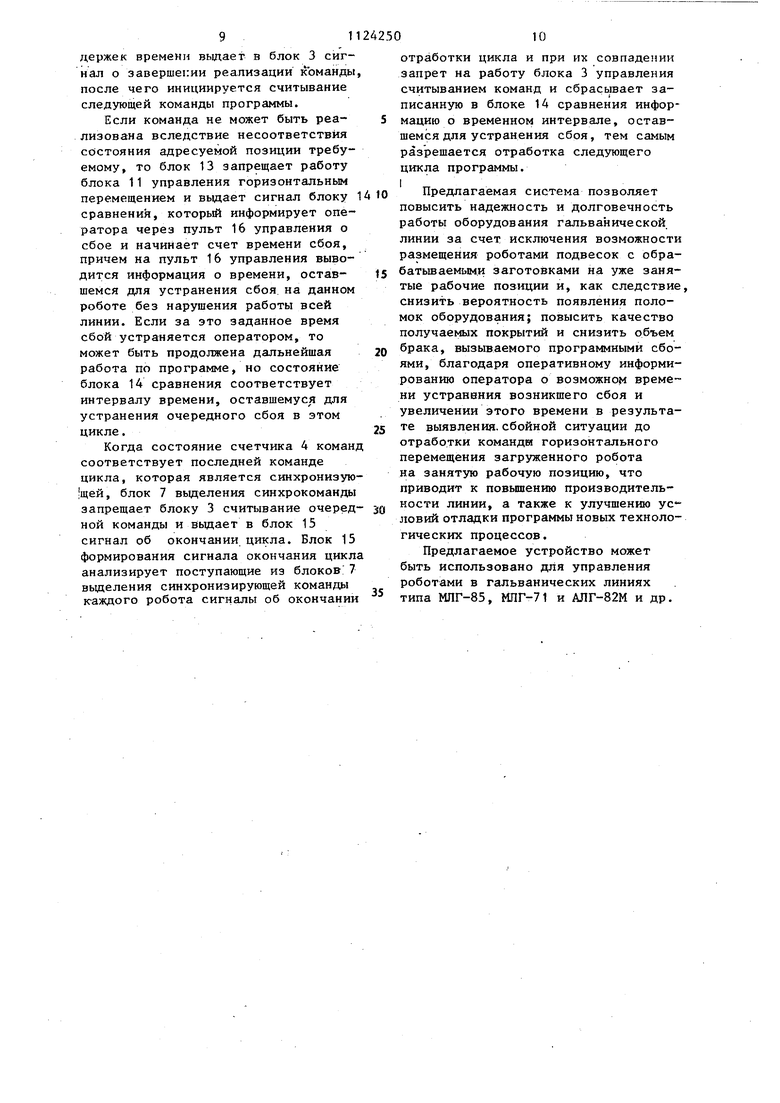
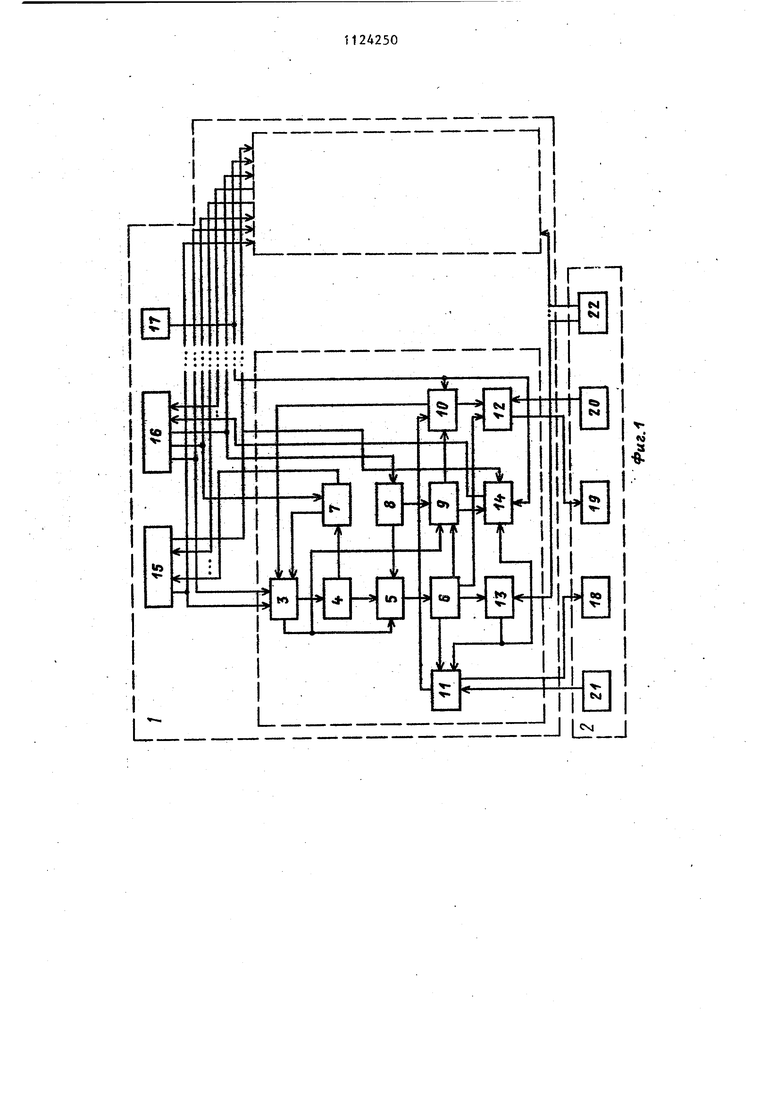
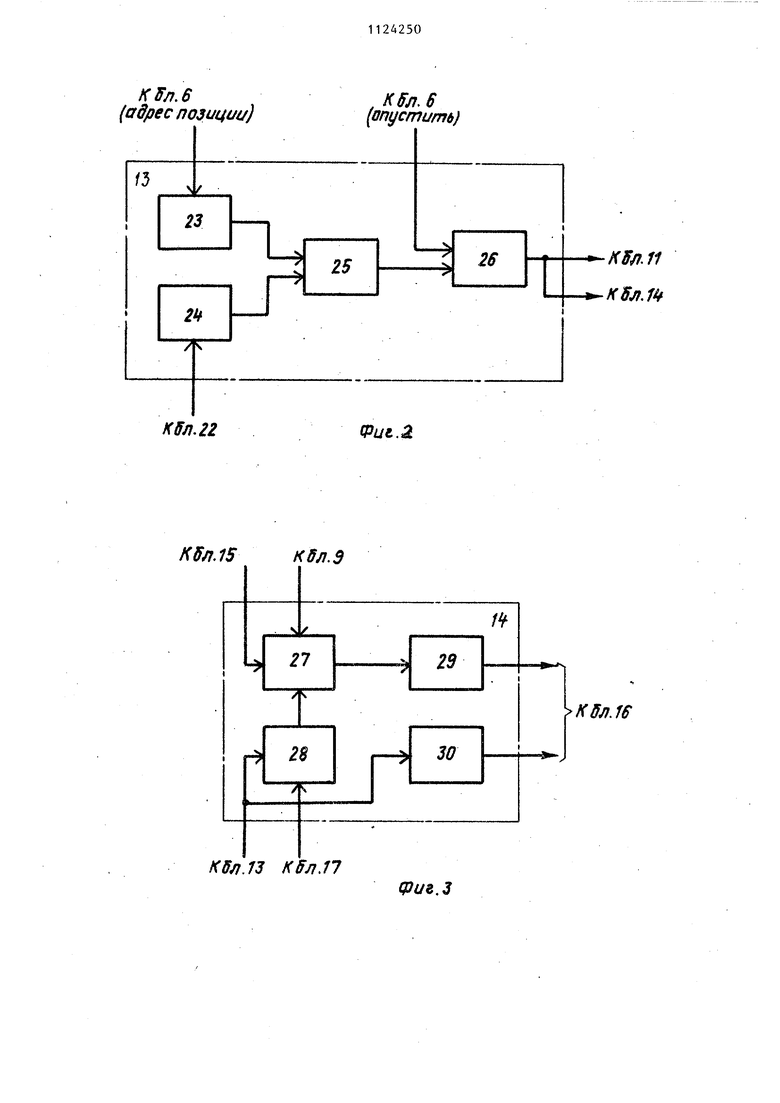
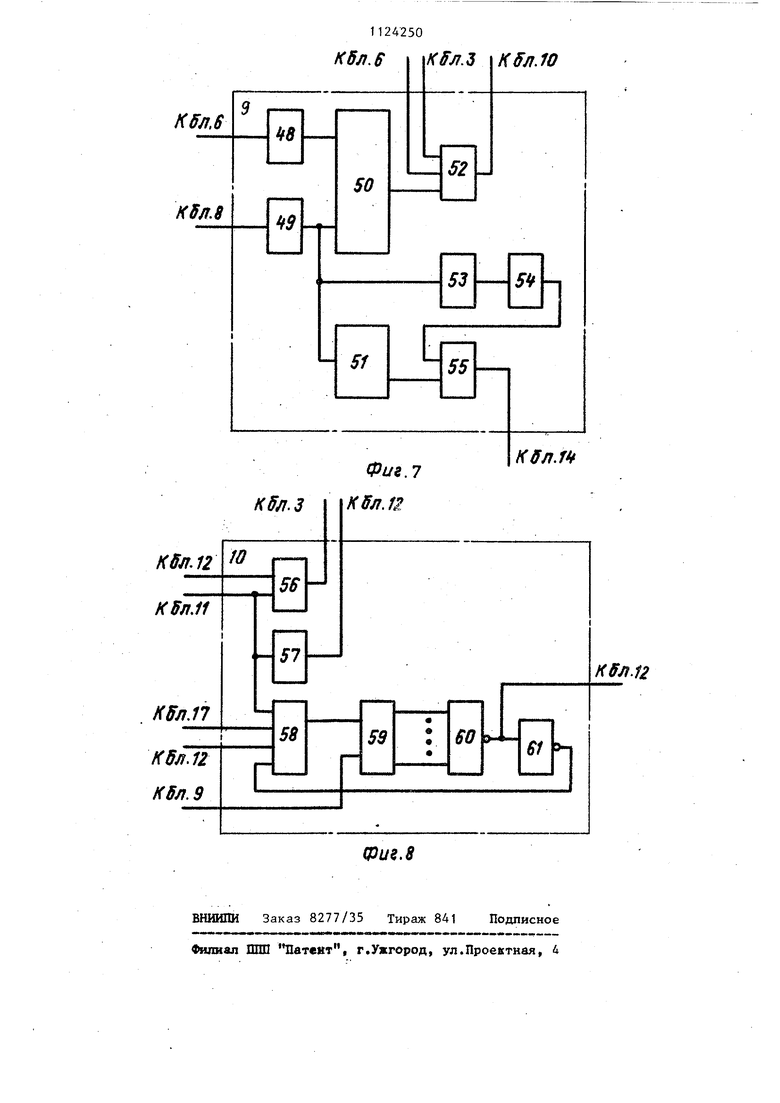
Изобретение относится к дискретным автоматическим устройствам, управляющим технологическими процессами, и может использоваться для управления комплексами роботов-ма- нипуляторов, автоматическими линийми автооператорного типа для нанесения покрытий, а также в автоматизированных системах автоматно-механического и сборочного производства. Известно устройство, содержащее блок датчиков перемещения, блок ввода программы, регистр адреса, ком мутатор, блок сравнения, блоки управления горизонтальным и вертикальным перемещениями, блок исполнительных механизмов, счетчик времени, бпт задания вьщержек времени, блок контроля движения по времени и блок управления l j . Однако в указанном устройстве, во-первых, отсутствует связь между фактической загрузкой отдельных позиций и кодом адреса горизонтального перемещения, вьщаваемым блоком ввода программы, что приводит к опас ности опускания транспортируемой подвески на уже занятую рабочую позицию при случайном сбое программы во-вторых, затруднена реализация управления комплексом роботов-манипуляторов вследствие высокой степени централизации управления, что приводит к остановке всей линии при jno6oM случайном программном сбое. Наиболее близким к предлагаемому является устройство программного управления роботами гальванической линии, содержащее по числу роботов блоки управления, блоки анализа выполнения команд, счетчики команд, регистры адреса перемещения роботов коммутаторы программы, блоки отработ ки вьщержек времени, блоки управлен считыванием команд, блоки постоянной памяти технологических маршрутов, блоки полупостоянной памяти технологических выдержек времени, блоки вьщеления синхронизирующей команды , программ управления роботами и общие для всех роботов пульт управления, датчик точного времени, блок анализа выполнения программы технологического процесса и блок контроля ритма выхода подвесок с деталями f2 . Недостатками данного устройства являются, во-первых, возможность возникновения аварий оборудования вследствие отсутствия связи между ходом отработки программы технологического процесса и информацией о фактической загрузке рабочих позиций, что может привести в результате программноГо сбоя к необходимости поместить подвеску на уже занятую рабочую позицию, во-вторых, отсутствие информации у оператора о возможном времени устранения возникшего сбоя на каждом роботе, что при автономном устранении сбоя без остановки технологической линии, в свою очередь, может привести к столкновению соседних роботов и полной остановке всей технологической линии и, как следствие, к браку всех обрабатываемых в данный момент на технологической линии заготовок. Цель изобретения - повышение надежности устройства. Поставленная цель достигается тем, что в устройство программного управления роботами гальванических линий, содержащее блок формирования сигнала окончания цикла, пульт управления, датчик времени и по числу роботов линии N каналов, каждый из которых состоит из формирователя адреса команд, соединенного первым 311 командным входом с первым командным выходом блока формирования сигнала окончания цикла, вторым командным входом - с первым выходом пульта управления, третьим командным входом - с первым выходом блока отработки выдержек времени, четвертым командным входом - с первым выходом блока,выделения синхрокоманды, командным выходом - с первым входом счетчика команд, стробирующим выходом - с первым входом блока постоянной памяти и с первым входом блока полупостоянной памяти, подключенного вторым входом к второму выходу коммутатора программ, третьим входом - к первому выходу регистра команд, первым выходом - к первому входу блока отработки выдержек времени, связанного вторым входом с датчиком времени, третьим входом - с первым выходом блока управления горизонтальным перемещением, а вторым выходом - с первым входом блока управления вертикаль ным перемещением, соединенного вторым входом с датчиком вертикального положения, выходом - с исполнительньт механизмом вертикального перемещения а третьим входом - с вторым выходом регистра команд, подключенного входом к вьпсоду блока постоянной памяти, третьим выходом - к первому входу блока управления горизональным перемещением, соединенного вторым входом с датчиком горизонтального положения а вторым выходом - с исполнительным .механизмом горизонтального перемещения-, причем первый выход счетчика команд подключен к второму входу блока постоянной памяти, а второй выход к первому входу блока вьщеления синхрокоманды, соединенного вторым выходом с входом блока формирования сигнала окончания цикла, а вторым вхо дом - с вторым выходом,пульта управления, подключенного третьим выходом к входу коммутатора программ, связанного первым выходом с третьим входом блока постоянной памяти, введены датчик загрузки рабочих позиций и в каждый канал первый блок сравнения и второй блок сравнения, подключенный первым информационным входом к четвертому выходу регистра крманд,вторым, информационным входом - к датчикам загрузки рабочих позиций, а выходом к третьему выходу блока управления горизонтальнь м перемещением и к первому управляющему входу первого блсж 0 сравнения, соединенного первым информационным входом с вторыь выходом блока полупостоянной памяти, вторым управляющим входом - с вторым выходом блока формирования сигнала окончания цикла, вторым информационным входом - с выходом датчика времени, а выходом - с входом пульта управления. На фиг. 1 представлена блок-схема устройства программного управления роботами гальванических линий; на фиг. 2 - скема блока сравнения; на фиг. 3 - схема блока анализа времени сбоя; на фиг, 4 - схема формирователя адреса команд; на фиг. 5 - схема блока постоянной памяти; на фиг. 6 схема блока вьщеления синхрокоманды; на фиг. 7 - схема блока полупостоянной памяти; на фиг. 8 - схема блока отработки выдержек времени. Устройство содержит узел ,1 управления (фиг. 1) и узел2 связи с объектом, которым является гальваническая линия. Узел 1 управления содержит по числу роботов формирователи 3 адреса команд, счетчики 4 команд, блоки 5 постоянной памяти, регистры 6 команд, блоки 7 выделения синхрокоманды, коммутаторы 8 программ, блоки 9 полупостоянной памяти, блоки 10 отработки вьщержек времени, блоки 11 управления горизонтальным перемещением, блоки 12 управления вертикальным пеперемещением, вторые блоки 13 сравнения; первые блоки 14 сравнения и общие дпя всех роботов блок 15 формирования сигнала окончания цикла, пульт 16 управления и датчик 17 времени. Узел 2 связи с объекто содержит по числу роботов исполнительные механизмы 18 горизонтального перемещения, исполнительные механизмы 19 вертикального перемещения, датчики 20вертикального положения, датчики 21горизонтального положения и общие для всех роботов датчики 22 загрузки рабочих позиций. Блок 13 сравнения (фиг. 2) состоит из дешифратора 23 адреса, нормализатора 24 уровня входных сигналов, узла 25 опроса состояния датчиков и элемента И 26. Блок 14 сравнения (фиг. 3) включает в себя вычитавбщий счетчик27, элемент И 28, дешифратор 29 индикации и элемент НЕ 30, Формщюватель 3 адреса команд (фиг. 4) состоит из триггера 31 , 3JTeMeHta $1 И 32 , элемента ИЖ 33, формирователей 3 и 35, элемента 36 задержки и усилителя 37. Блок 5 .постоянной памяти (фиг. 5) включает в себя дешифраторы 38 и 39, элементы И 40, 41 и 42 с повышенной нагрузочной способностью и постоянное запоминающее устройство 43. Блок 7 выделения синхронизирующей команды (фиг. 6) состоит из .схемы 44 сравнения кодов, регистра 45, усилителя 46 и полупостоянного запоминающего устройства 47 синхрокоманд на программных переключателях. Блок 9 полупостоянной памяти (фиг. 7) состоит из дешифраторов 48 и 49, запоминающих элементов 50 и 51 на программных переключателях, элемента И 52 с повышенной нагрузочной способностью, элемента ИЖ 53, формирователя 54 и регистра 55. Блок 10 отработки выдержек времени (фиг. 8) включает в себя элементы И 56, 57 и 58, вычитающий счетчик 59 и элементы ИЛИ 60 и 61. БЛОК 15 анйлиза выполнения программы состоит из элемента И и формирователя. Исполнительные механизмы 18 и 19 состоят каждый из асинхронно го двигателя и тиристорных симметричных ключей. Датчик 17 времени представляет собой генератор секундных импульсов; узел 25 опроса состояния датчиков состоит из двух элементов И и элемента ИЛИ; узел 28 управления представляет собой элемент И, а узел 30 управления индикацией - элемент НЕ. Узел 1 управления предназначен дл управления комплексом роботов. Узел связи с объектом выполняет функции реализации команд, формируемых узлом 1 управления, и сброса необходимой информации. Формирователь 3 выполняет функции управления занесением информации в счетчик 4 команд и стро бирования моментов считывания технологических команд и временных вьщержек из блока 5 постоянной памяти и блока 9 полупостоянной памяти соответственно. Счетчик 4 команд определяет адрес в блоке 5 постоянной памяти, по которому хранится информация, соответствующая требуемой техно логической команде. Блок 5 постоянной памяти осуществляет функцию хранения библиотеки программ технологических маршрутов горизонтального , 0 перемещения робота и выполняемых на каждой из рабочих позиций действий. Регистр 6 команд служит|ДЛЯ хранения информации, соответствующей одному шагу выбранного технологического процесса. Блок 7 выделения синхрокоманды служит для формирования сигнала о выполнении цикла программы выбранного технологического процесса данным роботом. Коммутатор 8 программ предназначен для выбора из библиотеки программ технологических процессов программы, соответствующей требуемому технологическому процессу, и управляет работой блока 5 постоянной памяти и блока 9 полупостоянной памяти в части определения области памяти, где размещается требуемая программа. Блок 9 полупостоянной памяти выполняет функцию хранения информации выдержек времени в движении роботов на каждой из рабочих позиций для всех технологических процессов. Блок 10 отработки выдержек времени управляет работой блока 12 управления вертикальным перемещением в части организации необходимых временных задержек следования команд. Блок 11 управления горизонтальным перемещением осуществляет функцию обработки информации о требуемом и действительном положении робота и выработки управляющих команд исполнительному механизму 18 горизонтального перемещения. Блок 12 управления вертикальным перемещением обрабатывает информацию о характере требуемых действий на каждой рабочей позиции и управляет исполнительными механизмами 19 вертикального перемещения. Блок 13 сравнения (блок анализа состояния адресуемой позиции) обрабатывает информацию об адресе перемещения робота, характере выполняемых действий и состоянии соответствующих датчиков 22 загрузки рабочих позиций и управляет работой блока 11 управления горизонтальным перемещением и блока 14 сравнения. Блок 14 сравнения выполняет функцию информирования оператора через пульт 16 управления о появлении сбоя и о времени, имеющемся в распоряжении оператора для устранения сбоя, в течение которого нормальный ход технологического процесса не будет
нарушен, т.е. качество покрытия будет удовлетворительным и соседние роботы не столкнутся.
Блок 15 формирования сигнала окончания цикла служит для определения момента выполнения программы выборочного технологического процесса для одного.цикла обработки деталей всеми роботами. Пульт 16 управления предназначен для обмена информацией между оператором и системо Датчик 17 времени служит для формирования импульсов точного времени,
Исполнительньй механизм 18 горизонтального перемещения осуществляет перемещение робота вдоль технологической линии, исполнительный механизм 19 вертикального перемещения в вертикальной плоскости. Датчики 20 вертикального положения служат для идентификации положения робота в вертикальной плоскости, датчики 21 горизонтального положения - в горизонтальной плоскости. Датчики 22 загрузки рабочих позиций предназначены для определения загрузки рабочих позиций.
Устройство работает следующим образом.
Перед началом автоматической работы, в соответствии с выбранным технологическим процессом, оператор должен разместить на рабочих позициях линии определенное количество технологических подвесок, предназначенных для крепления обрабатываемых заготовок, и каждый из роботов должен быть помещен на соответствующую ему исходную позицию. Информация о требуемом технологическом процессе заносится посредством пульта 16 управления в коммутатор 8 программы, который позволяет определить в блоке 5 постоянной памяти и в блоке 9 полупостоянной памяти области памяти хранящие команды и соответствующие им временные вьщержки, необходимые для реализации выбранного технологического процесса.
Программа работы каждого робота является периодической, состоящей из нескольких циклов, после выполнения каждого из которых происходит синхронизация работы всех роботов.
Пуск линии в автоматический режим работы осуществляется оператором через пульт 16 управления. В результат блок 3 инициирует занесение в счетчики 4 команд первой команды программы выбранного технологического процесса, которая считывается.из блока 5 постоянной памяти и запоминается в регистре 6 команд. Команда содержи информацию об адресе рабочей позиции горизонтального перемещения робота и о тех действиях вертикального перемещения, которые должны быть выполнены из данной рабочей позиции. Часть информации, записываемой в регистр 6 команд, поступает на вход блока 9 полупостоянной памяти и вместе со стробирующим сигналом блока 3 управляет считыванием из блока полупостоянной памяти кода требуемых для данной команды временных вьщержек, которые запоминаются в блоке 10 отработки выдержек времени. Временные выдержки для каждой команды призваны устранить качание подвески после горизонтального перемещения, обеспечить стекание раствора после выполнения .технологической операции выполнение самой операции. По этому же сигналу, соответствующему первой команде каждого цикла отрабатываемой программы, из блока 9 полупостоянной памяти в блок 14 сравнения заносится информация, характеризующая допустимьй временной интервал за один цикл работы линии для устранения сбоя программы данного робота. I
В соответствии с адресом горизонтального перемещения и характером выполняемых на рабочей позиции действий вертикального перемещения блок 13 сравнения анализирует возможность отработки заданной команды и, если команда может быть реализована, то своим сигналом разрешает горизонтальное перемещение робота. Блок 11 управления горизонтальным перемещением формирует сигналы, управляющие положением робота, и после отработки заданного горизонтального перемещения выдает сигнал блоку 10 отработки вьщержек времени, которьй разрешает выполнение отдельных действий блоком 12 управления вертикальным перемещением. Блок 12 управления вертикальным перемещением в соответствии с информацией регистра 6 команды и сигналами блока 10 отработки технологических выдержек времени управляет выполнением действий по вертикальному перемещению робота, и после их завершения блок 10 отработки вы91держек времени выдает в блок 3 сигнал о завершекии реализации команды после чего инициируется считывание следующей команды программы. Если команда не может быть peaлизована вследствие несоответствия состояния адресуемой позиции требуемому, то блок 13 запрещает работу блока 11 управления горизонтальным перемещением и выдает сигнал блоку сравнения, который информирует оператора через пульт 16 управления о сбое и начинает счет времени сбоя, причем на пульт 16 управления выводится информация о времени, оставшемся для устранения сбоя на данном роботе без нарушения работы всей линии. Если за это заданное время сбой устраняется оператором, то может быть продолжена дальнейшая работа по программе, но состояние блока 14 сравнения соответствует интервалу времени, оставшемуся для устранения очередного сбоя в этом цикле. Когда состояние счетчика 4 коман соответствует последней команде цикла, которая является синхронизую |щей, блок 7 выделения синхрокоманды запрещает блоку 3 считывание очеред ной команды и зыдает в блок 15 сигнал об окончании цикла. Блок 15 формирования сигнала окончания цикл анализирует поступающие из блоков;7 выделения синхронизирующей команды каждого робота сигналы об окончании отработки цикла и при их совпадении запрет на работу блока 3 управления считыванием команд и сбрасывает записанную в блоке 14 сравнения информацию о временном интервале, оставшемся для устранения сбоя, тем самым разрешается отработка следующего цикла программы. I Предлагаемая система позволяет повысить надежность и долговечность работы оборудования гальванической линии за счет исключения возможности размещения роботами подвесок с обрабатьшаемыми заготовками на уже занятые рабочие позиции и, как следствие, снизить вероятность появления поломок оборудования; повысить качество получаемых покрытий и снизить объем брака, вызываемого программными сбоями, благодаря оперативному информированию оператора о возможном времени устранения возникшего сбоя и увеличении этого времени в результате выявления, сбойной ситуации до отработки командм горизонтального перемещения загруженного робота на занятую рабочую позицию, что приводит к повышению производительности линии, а также к улучшению ус ловий отладки программы новых технологических процессов. Предлагаемое устройство может быть использовано для управления роботами в гальванических линиях типа МЛГ-85, МЛГ-71 и АЛГ-82М и др.
КУл.б (адрес позиции)
25
К Ил. 22
KS/J.15 кбл.Э
, . в (опустить)
-
26
(Put.
кдл.ге
(ри.З
К ил. Г6
Кдл.Ю
fe
.1
31
Кдл.15
К 5л Л
J5
J4
КВл.5
.З
д6
35
(Pt/г.
Фие.5
7
К5лЛ
.З
К 5л. Г5
45
К5л. IS
liB
4-7
Фиб,$
К5л.В
Кбл,6
8
Кдп.9
9
.З
К5л.10
52
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для программного управления автооператором гальванической линии | 1976 |
|
SU636585A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство программного управления автооператорами гальванической линии | 1976 |
|
SU654699A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
