4
сл
Од 4ai
а
Изобретение относится к устройствам управления и может быть использовано для управления двухпозицион- ными механизмами, манипуляторами, загрузочными устройствами.
Цель изобретения - улучшение энергетических характеристик и повьшение надежности.
На фиг. 1 показана блок-схема устройства; на фиг. 2 - блок исполнительных механизмов; на фиг. 3 - схема блока привода; на фиг. 4 - функциональная схема командного блока; на фиг. 5 - принципиальная схема командного блока; на фиг. 6 - блок программы.
Устройство управления резонансным позиционным механизмом включает в себя подвижные звенья 1.1,...,1.п, клавишный пульт 2, блок 3 программы, блок 4 индикации,, шины 5-7 конца операции команд и датчиков соответственно. Технологическое оборудование 8 соединяется шиной 9 опроса и шиной 10 угфавления с блоком программы.
Подвижное звено содержит блок 11 исполнительных механизмов, блок 12 привода и командный блок 13.
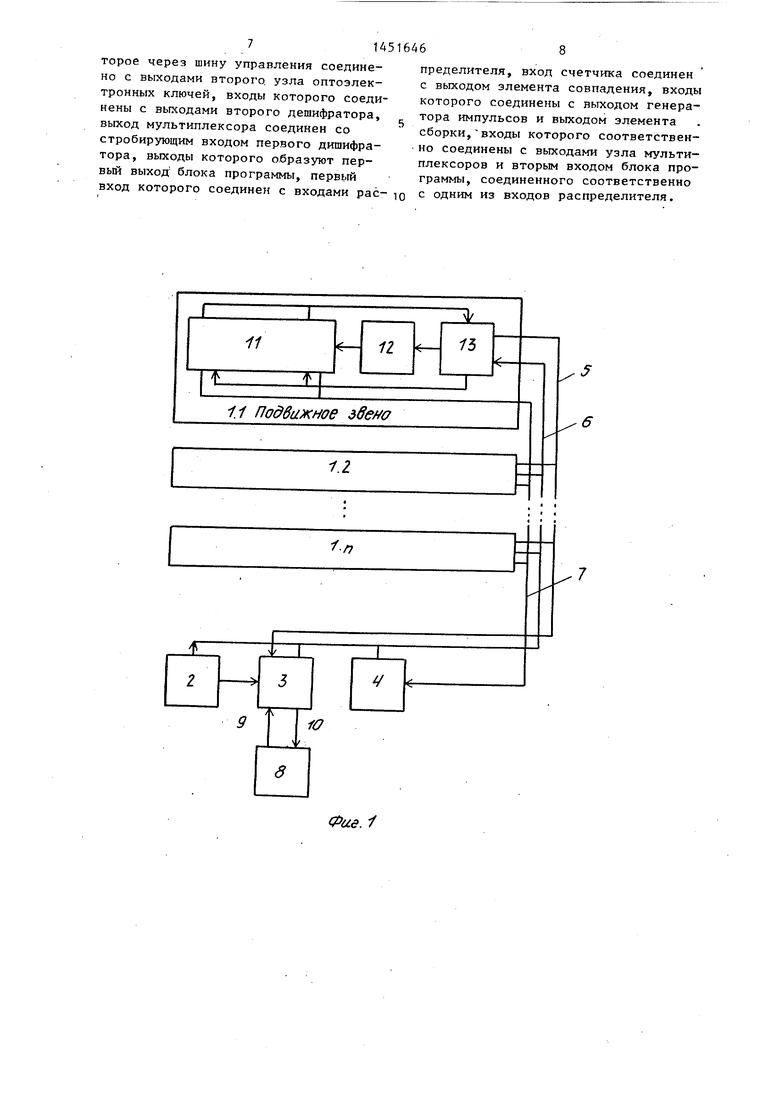
Блок исполнительных механизмов 11 (фиг.2) включает в себя датчики 14 и 15, защелки-фиксаторы 16 и 17, привод 18 и узел 19 упругих элементов.
Командный блок 13 (фиг.4) состоит из двух элементов 20 и 21 отработки команд, двух узлов 22 и 23 опроса датчиков, двух 24 и 25 элементов включения защелок, двух элементов 26 и 27 формирования направления движения, узла 28 обработки входных сигналов и элемента 29 включения двигателя.
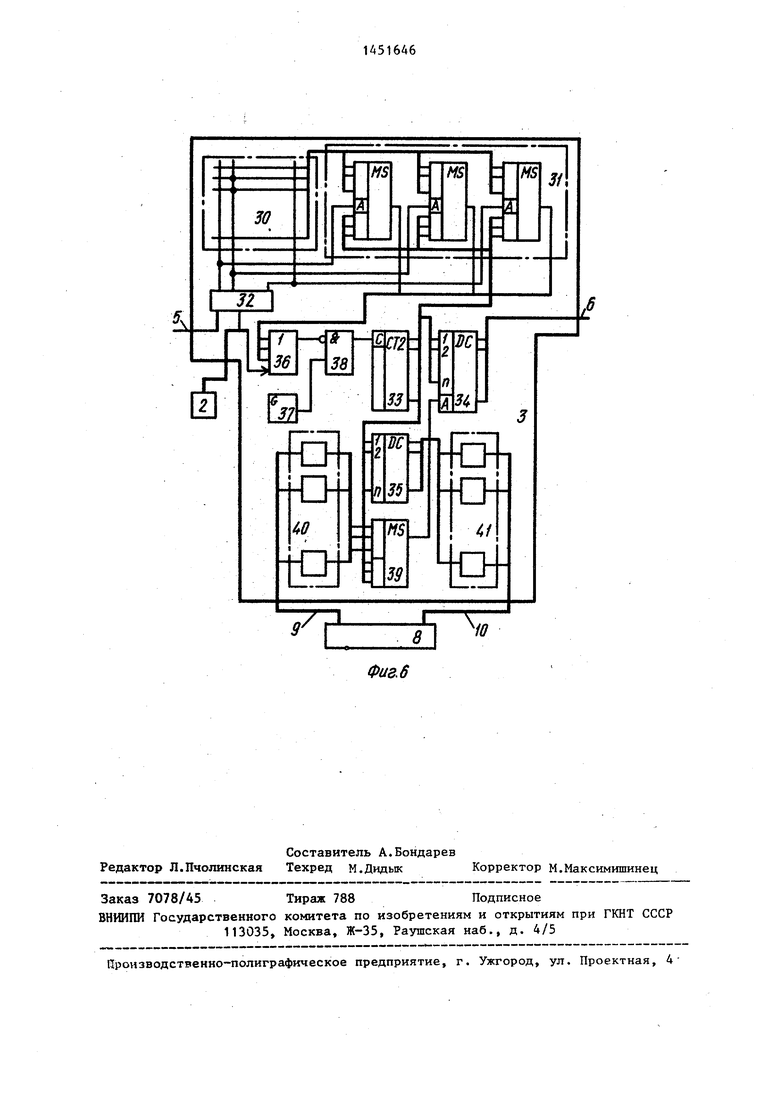
Блок 3 программы (фиг.6) содержит матрично-штеккерную панель 30, узел 31 мультиплексоров, распределитель 32, счетчик 33, два дешифратора 34 и 35, элемент 36 сборки, генератор 37 импульсов, элемент 38 совпадения, мультиплексор 39 и два узла 40 и 41 оптоэлектронньпс ключей.
Устройство работает следующим образом.
В исходном состоянии блоки 11 исполнительных механизмов в подвижных звенъях 1.1,...,1.П находятся в одном из крайних положений, которое зафиксировано защелками-фиксаторами 16 и 17.
Устройство может управляться с клавишного пульта 2 н режиме ручного управления или с блока 3 програ(мы в автоматическом режиме.
Рассмотрим работу устройства в автоматическом режиме.
В блоке 3 программы на матрично- штеккерной панели 30 набирается циклограмма работы и по команде с клавишного пульта 2 включается распределитель 32. Распределитель поочередно подает на вертикальные шины мат- рично-штеккерной панели высокий потенциал. Положением штеккеров на вертикальной шине закодирована команда, которая должна выполняться в данный момент.
С горизонтальных шин панели 30 информация поступает на информационные входы узла 31 мультиплексоров. Кажды мультиплексор в узле стробируется сигналом с распределителя. Одновременно генератор кодов команд, включающий генератор 37 импульсов, счетчик 33 и дешифратор 34, производит последовательную расшифровку кодов команд. Эти коды поступают на адресные входы узла 31 мультиплексоров. Если код команды, поступивший с мат- рично-штеккерной панели, совпадает с кодом генератора кода, узел мультиплексоров 31 вьщает сигнал совпадения кодов. Сразу же элемент 36 сборк по запрещающему входу запрещает работу ген ератора кодов и в счетчике 33 фиксируется код операции, записанный в матрично-штеккерной панели 30.
Второй дешифратор 35 расшифровывает его и через второй узел 41 опто- электронных ключей и шину 10 управле ия выдает команду исполнительным механизмам технологического оборудования 8.
Одновременно мультиплексор 39, расшифрован код команды, через первый узел оптоэлектронных ключей 40 и шину опроса 9 опрашивает датчики технологического оборудования 8 и при получении сигнала с датчиков вьщает разрешение на первый дешифратор 34.
Дешифратор 34 расшифровывает код команды и преобразует его в соответствующую команду. В зависимости от вида команды шина b команд подключает соответствующие входы подвижных звеньев.
1451646
Управлять подвижньм звеном можно
10
и вручную с клавишного пульта 2. При этом с клавишного пульта на элемент 36 сборки приходит сигнал блокирующий счетчик 33. Выдача команд на шину 6 команд производится непосредстденно с клавиши клавишного пульта 2.
В подвижном звене управляющие сигналы поступают на командный блок 13 (фиг.4).
Командный блок 13 предназначен для управления блоком 12 привода и блоком 11 исполнительных механизмов. Он запускается сигналами с шины 6 команд.
Элементы 20 и 21 отработки команд вырабатывают команду Запуск при наличии сигналов с шины 6 команд и с датчиков 14 и 15. Элементы включения защелок 24, 25 управляются командами Запуск элементов отработки- команд и Повторный запуск узла 28 обработки входных сигналов. По этим командам схемы включают защелки 16 и 17 и вьщают сигнал на включение элементов 26 и 27 формирования направления движения.
Элементы формирования направления
Введение в блок 3 программы (фиг.6 схемы, состоящей из дешифратора 35 мультиплексора 39 и узлов 40 и 41 о тронных ключей, позволяет обеспечит согласованность работы устройства с технологическим оборудованием.
Так, мультиплексор 39 и узел 40 оптоэлектронных ключей обеспечивают инициализацию состояния датчиков об служиваемого технологического обору дования и выдачу команды разрешения на дешифратор 34. Дешифратор 35 и узел 41 оптоэлектронных ключей про- 15 изводят вьщачу команд на исполнител ные механизмы технологического обор дования.
В предложенном устройстве защелк включается только в начальный момен
20 для передачи приводу кинетической
энергии упругих элементов и на время необходимое для расфиксации привода Это позволяет значительно улучшить энергетические характеристики приво25 да. Защелка работает в импульсном ре жиме и, кроме того, практические отсутствуют ударные нагрузки, так как в режиме реверса, если даже привод возвращается на исходную защелку, с
f,,,acmrm пащлсюлеиияiJu оращлс I CM на исходную ЗащеЛКу С
движения по сигналу элементов включе- 30 датчика в командный блок 13 ()
ИМЯ Q S3 ГТО тг/ г« г т л тч f-rfT v «. -.«... -. -.
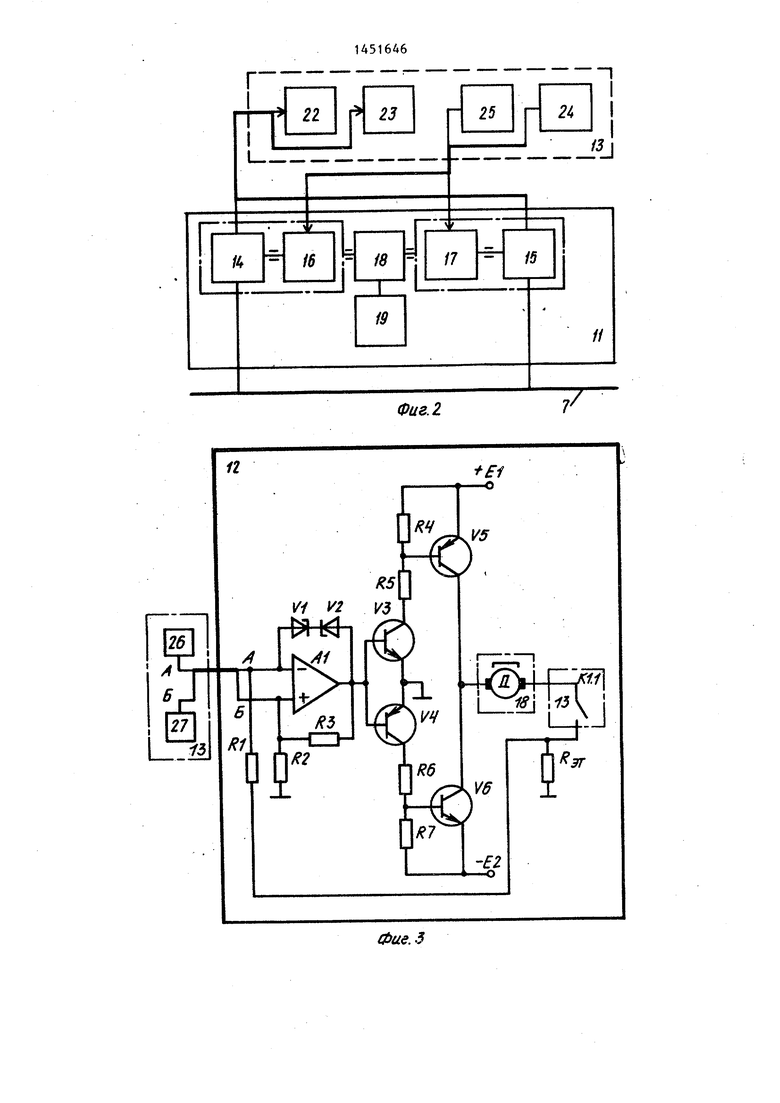
ния заделок устанавливают компаратор А1 в блоке 12 привода в состояние, соответствующее команде, пришедшей с шины 6 команды, формируют задержку включения двигателя и выдают сигнал на включение двигателя.
Элемент включения двигателя 29 по сигналам с формирователей направления движения включает двигатель и по
поступает сигнал на узел 28 обработки входных сигналов, который проанализирует этот сигнал и вьщает команду повторного запуска, вся операция 25 повторяется.
В устройстве возможно подключать и отключать в заданный момент време .. ..V. ни двигатель, поскольку после снятия
команде Стоп с узла обработки вход- 40 привода с защелки он начинает дви- ных сигналов останавливает его. гаться за счет кинетической энергии.
Узлы 22 и 23 опроса датчиков опрашивают соответственно датчики 14 и 15 и вьщают сигналы на схему 28 обработки входных сигналов.
Основным узлом командно4: о блока 13 является узел 28 обработки входных сигналов. Он запоминает с какого из элементов отработки команд пришел сигнал Запуск. В зависимости от этих сигналов узел 28 по сигналам с узлов 22, 23 выдает команду Стоп и сигнал на шину 5 конца операции или, если операция не выполнилась и привод пришел на другой датчик, схема 28 дает команду Стоп и команду Повторный запуск на соответствующий элемент выключения защелок, тем самым повторит цикл операции.
накопленной упругими элементами, двигатель в это время находится в отключенном состоянии. А во второй полови- 45 не пути для преодоления силы упругости, возникающей между упругими элементами, необходимо включить двигатель. В устройстве двигатель включается через некоторое заданное время после снятия привода с защелки. Это позволяет значительно смягчить ударные нагрузки, приходящиеся на привод, при постановке на другую защелку.
55 Командный блок 13 может отключать цепь питания двигателя при фиксации привода защелкой по сигналу с датчика защелки. Это позволяет уменьшить износ фрикционного механизма и улуч50
10
Введение в блок 3 программы (фиг.6) схемы, состоящей из дешифратора 35, мультиплексора 39 и узлов 40 и 41 оп- тронных ключей, позволяет обеспечить согласованность работы устройства с технологическим оборудованием.
Так, мультиплексор 39 и узел 40 оптоэлектронных ключей обеспечивают инициализацию состояния датчиков обслуживаемого технологического оборудования и выдачу команды разрешения на дешифратор 34. Дешифратор 35 и узел 41 оптоэлектронных ключей про- 5 изводят вьщачу команд на исполнительные механизмы технологического оборудования.
В предложенном устройстве защелка включается только в начальный момент
0 для передачи приводу кинетической
энергии упругих элементов и на время, необходимое для расфиксации привода. Это позволяет значительно улучшить энергетические характеристики приво5 да. Защелка работает в импульсном режиме и, кроме того, практические отсутствуют ударные нагрузки, так как в режиме реверса, если даже привод возвращается на исходную защелку, с
iJu оращлс I CM на исходную ЗащеЛКу С
0 датчика в командный блок 13 ()
30 датчика в командный блок 13 ()
«... -. -.
поступает сигнал на узел 28 обработки входных сигналов, который проанализирует этот сигнал и вьщает команду повторного запуска, вся операция 25 повторяется.
40 привода с защелки он начинает дви- гаться за счет кинетической энергии.
накопленной упругими элементами, двигатель в это время находится в отключенном состоянии. А во второй полови- 5 не пути для преодоления силы упругости, возникающей между упругими элементами, необходимо включить двигатель. В устройстве двигатель включается через некоторое заданное время после снятия привода с защелки. Это позволяет значительно смягчить ударные нагрузки, приходящиеся на привод, при постановке на другую защелку.
(
5 Командный блок 13 может отключать цепь питания двигателя при фиксации привода защелкой по сигналу с датчика защелки. Это позволяет уменьшить износ фрикционного механизма и улуч0
шить энер гетические характеристики устройства.
Изобретение может быть применено для создания гибких автоматизирован- ных технологических систем, а именно для обслуживания прессов, станков с числовым программным управлением, для загрузки-разгрузки транспортных лент, для управления резонансными двухпозиционными механизмами, поскольку оно обеспечивает синхронную работу позиционного механизма и сопряженных с ним механизмов технологического оборудования, уменьшает ударные нагрузки, приходящиеся на привод механизма, улучшает его энергетические характеристики и уменьшает износ фрикционного механизма.
Формула изобретения
1.Устройство управления резонансным позиционным механизмом, содержащее подвижные звенья, каждое -из которых содержит блок исполнительных механизмов, вход которого соединен с блоком привода, клавишный пульт, блок индикации, блок программы, первый
вход которого соединен с шиной кон- ца операции, шина команд устройства соединена с первым выходом клавишного пульта, второй выход которого соединен с вторым входом блока программы, первый выход которого соединен с шиной команд, шина датчиков соединена с первым входом блока индикации, второй вход которого соединен с шиной команд, о тлич ающее ся тем что, с целью улучшения энергетических характеристик и повьш1ения надежности каждое подвижное звено дополнительно содержит командный блок, первый и второй выходы которого соответственно соединены с шиной конца операции и вторым входом блока исполнительных механизмов, выход которого соединен с первым входом командного блока, вто рой вход которого соединен с шиной команд, третий выход командного блок соединен с первым входом блока приво да, блок программы дополнительно содержит шину опроса и шину управления технологическим оборудованием.
2.Устройство по п.1, о т л и ч аю щ е е с я тем, что командный блок содержит первый и второй узлы опроса датчиков, первьй и второй элементы отработки команд, первый и второй
,
to
20
25 0Q .-,
55
50
элементы включения защелок, первый и второй элементы формирования направления движения, элемент включения двигателя, узел обработки входных сигналов, первый, второй, третий, четвертый входы которого соответственно соединены с первыми выходами элементов отработки команд и первыми выходами узлов опроса датчиков, первые входы которых соответственно соединены с первыми входами элементов отработки команд, образуют первый вход командного блока, второй вход которого соединен с вторыми входами элемента отработки команд, первые выходы которых соединены с первыми входами элементов включения защелок, вторые выходы которых соответственно соединены с первыми и вторыми выходами узла обработки входных сигналов, третий выход которой соединен с первым входом элемента включения двигателя, второй и третий входы которого соответственно соединены с первыми выходами элементов формирования направления движения, первый вход которых соединен с первым выходом элементов включения защелок, вторые выходы которых .образуют второй выход командного блока, первый выход которого соединен с четвертым выходом узла обработки входных сигналов, вторые выходы .элементов формирования направления движения образуют третий выход командного блока.
3. Устройство по п.1, о т л и ч а- ю щ е е с я тем, что блок программы содержит первый и второй узлы опто- электронных ключей, мультиплексор, первый и второй дешифраторы, элемент совпадения, генератор импульсов, элемент сборки, счетчик, узел мультиплексоров, матрично-штеккерную панель, распределитель, выходы которого соединены со стробирующими входами узла мультиплексоров и вертикальными шинами матрично-штеккерной панели, горизонтальные шины которой соединены с информационными входами узла мультиплексоров, адресные шины которого соединены с выходами счетчика, входами первого и второго дешифраторов и адресными входами мультиплексора, информационные входы которого соединены с выходами первого узла оптоэлектронных ключей, входы которого соединены через шину опроса с технологическим,оборудованном, которое через шину управления соединено с выходами второго, узла оптоэлек- тронных ключей, входы которого соединены с выходами второго дешифратора, выход мультиплексора соединен со стробирующим входом первого дишифра- тора, выходы которого образуют первый выход блока программы, первьгй вход которого соединен с входами рас
пределителя, вход счетчика соединен с выходом элемента совпадения, входы которого соединены с выходом генератора импульсов и выходом элемента сборки,входы которого соответственно соединены с выходами узла мультиплексоров и вторым входом блока программы, соединенного соответственно с одним из входов распределителя.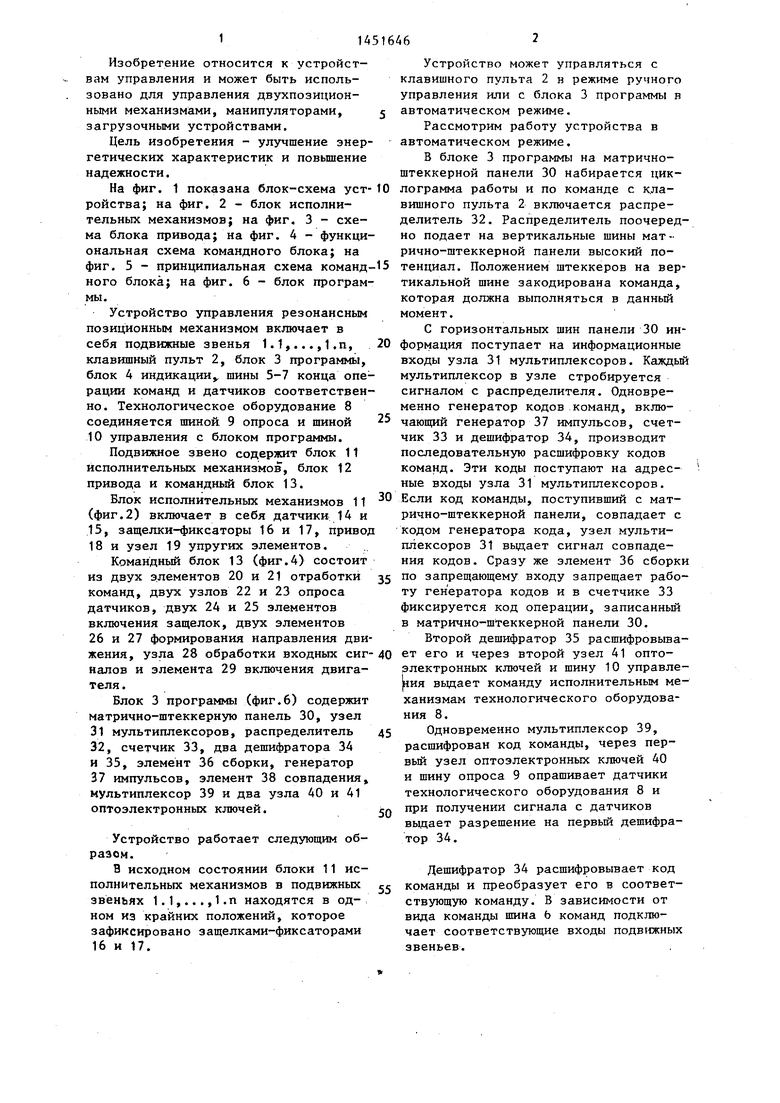


| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| Устройство для контроля параметров | 1986 |
|
SU1403074A1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЭВМ С ТЕЛЕФОННЫМИ ЛИНИЯМИ СВЯЗИ | 1992 |
|
RU2006927C1 |
| Устройство для контроля межслойных соединений печатных плат | 1986 |
|
SU1323987A1 |
| Вентильный электропривод | 1990 |
|
SU1767679A1 |
| Устройство для сопряжения процессора с устройством ввода-вывода | 1984 |
|
SU1180911A1 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| ВНУТРИСХЕМНЫЙ ЭМУЛЯТОР | 1996 |
|
RU2110833C1 |

Изобретение может быть использовано для управления резонансными двухпозиционными механизмами, манипуляторами и т.д. Целью изобретения является улучшение энергетических характеристик и повышение надежности. Устройство содержит подвижные звенья, соединенные через шины конца операции, команд и датчиков с блоками индикации программы с клавишньм пультом. В каждое подвижное звено введен командный блок. Кроме того, в блок программь введен мультиплексор, дешифратор и два узла оптоэлектронных ключей, соединенные шипами с технологическим оборудованием, что дает возможность синхронизировать работу подвижных звеньев и технологического оборудования. 2 з.п. ф-лы, 6 ил. 
Фие. i
Фиг. 2
/
f-Ei
Hj
Кзг
Фие. .5
Фиг. 6
| Резонансные манипуляционные системы с электроприводом | |||
| - Машиностроение, 1983, № 6, с.18-23 | |||
| Авторское свидетельство СССР № 1300414, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
