(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И ДОЗИРОВАНИЯ КЕРАМИЧЕСКИХ СУСПЕНЗИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Дозатор жидкости | 1989 |
|
SU1703979A1 |
| Устройство для сопряжения ЭВМ с группой абонентов | 1989 |
|
SU1647578A1 |
| Устройство для программного управленияпОТОКОМ жидКОСТи | 1978 |
|
SU849013A1 |
| Устройство для контроля цифровых узлов | 1981 |
|
SU1013960A1 |
| Устройство управления для доменной памяти | 1984 |
|
SU1265856A1 |
| Устройство для импульсного дозирования жидкости под давлением | 1978 |
|
SU746454A1 |
| Устройство для дозирования жидкости | 1981 |
|
SU1002841A1 |
| Устройство управления дозатором лекарственных веществ | 1987 |
|
SU1484349A1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2092903C1 |
| Устройство для программного управленияпОТОКОМ жидКОСТи | 1979 |
|
SU800966A1 |
I
Изобретение относится к автоматизации технологических процессов и может быть использовано как автономно, так и в составе автоматизированных систем управления процессом приготовления керамических суспензий в фарфоро-фаянс(жой промышленности, а также бетонных и , створных смесей в других отраслях.
Известен дозатор жидкости, содержащий резервуар, кондуктометрический датчик и релейную схему UlJОднако данное устройство не обеспечивает точность дозирования переменного обьема керамических суспензий.
Наиболее близким к изобретению по технической суишости является цозатор ЖИДКОСТИ, включающий емкость, непоовинс- ные электроды (датчики верхнего в нижнего уровня) и задающий подвижный электрод, исполнительные органы с бесконтактными датчиками положения, элементы сигнализации, червячный редуктор, электродвигатель, сельсин приемник, петите ли напряжений, нуль-органы, электроме
ханическое репе, noiQrapoBoцинковые логические элементы И, ПАМЯТЬ, усилит© ли мощности, блок пигания кнопку управ ЛИНИЯ Г2.
Недостатками известного являются: .использование двух непиФгокных элекгро- дов и задающего поовижного электропа . с резьбой, постоянно погруженных в жиак кость, что привооит к вадипанию вязких частиц на электрооы, в ре льтаге чего
10 понижается чувстве те льность схемы дожность поцвижнов части устройства; невысокая точность аоэврования вязкнх жяог костей вслепствие стекания по электроаам, что привооит к сохранению на некоторое. время электрической цепи межоу элекгдо- аами и жиокостыб после выоачи |аоаы и клапан слива остается открыт по разру шения контакта; невозможность измерения переменногч о6)ема жидкости в емкостя
20 и выдача переменных аоз порциями вслвпствие отсутствия объективного контроля уровня жиокости в емкрсти значительные погрешности в системе заоапия оозы аи лого-ресх;тагным зацатчиком} ограниченная ьоаможносгь применения усгройства управления при реализации установленной дозы для различных объемов емкости.
Цель изобретения - повышение гочностн и расширение функциональных возможностей устройства.
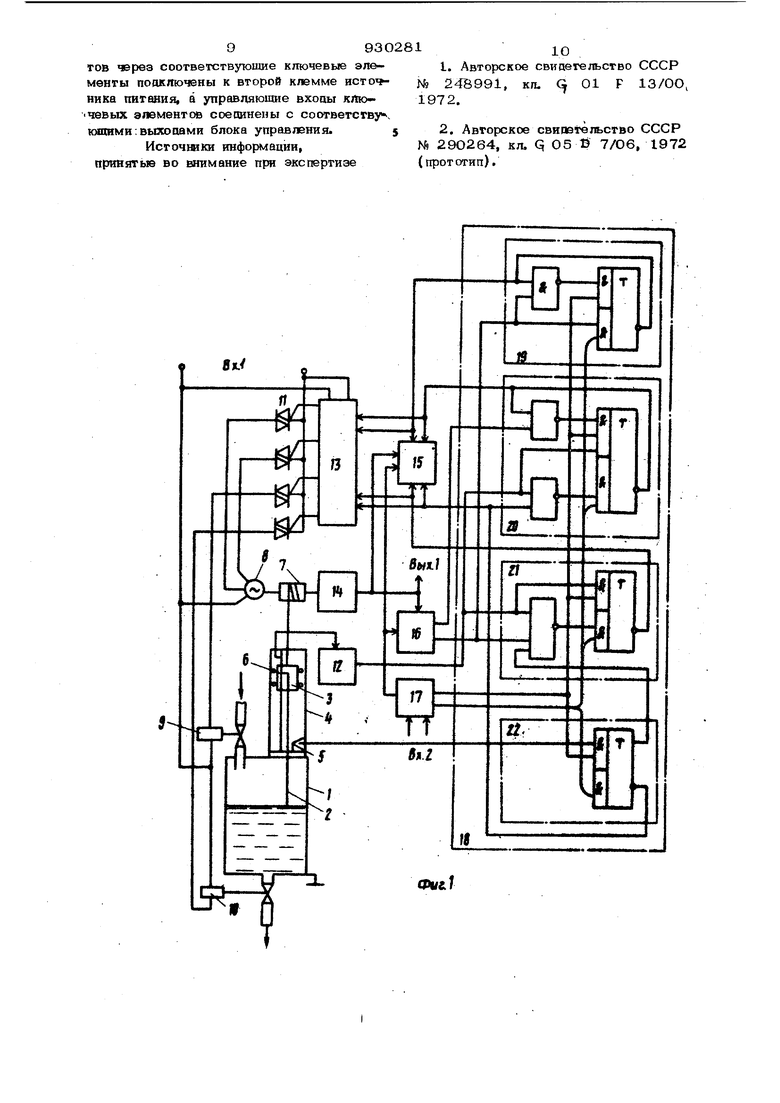
Поставленная цель достигается тем, что в дозатор жидкости, содержащий емкость с задающим подвижным электродом, связанным с входом усилителя, электродвигатель со шкивом, исполнительные .элементы, индикатор, введены последбвательно соединенные блок ввода информации и блок сравнения, блок управло1ия, ключевые эшменты, подвижную каретку, преобразователь угол-код, датчики положения каретки и формирователь команд, причем задающий подвижный электрод соединен с пощзижной кареткой, установлен-2о ной с возможностью перемещения по направляющим и кинетически связанной со шкивом электродвигателя, на валу которого установлен преобразователь угоямсод, выходом подключенный к второму входу блока сравнения и к первому входу индикатора, вторые входы которого соединены с соответствующими выходами формирователя команд и первыми входами блока управления, а третий вход - с первым вь ходом блока ввода, первые входы формирователя команд подключены соответственно к вторым выходам блока ввода информации, вторые входы соответственно к выходам блока сравнения, третий вход -к ВЫХОДУ усилителя, а чет ертый .вход - к выходу датчика положения каретки, первый вход электродвигателя подключен к одному из выводов обеих обмоток исполнительных элементов и к первой клемме источника питания, второй и третий входы электродвигателя и другие выэоды обмотсж исполнительных элементов через соответствующие ключевые элементы подключены к второй клемме источника питаний, а управляющие входы ключевых элементов соеоинены с соответствующими выходами блока управления. На фиг. I изображена структурная схема устройства для контроля и дозиро- 50 вания керамических суспензий; на фиг. 2структурная стема блока управления. Устройство для контроля и дозирования керамических суспензий (фиг. I) содержит емкость I, задающий подвижный эле- ктрод 2, подвижную каретку 3, направлявющие 4, датчик 5 положения каретки, токосьемный контакт 6, шкив 7, электродвигатель 8, впускной и выпускной клапаны Q и 10, ключевые элементы II, усилитель 12, блок 13 управления, преобразователь 14 угол-код индикатор 15, блок 16 сравнения, блок 17 ввода инфо{ мации, формирователь 18 команд.
Формирователь команд 18 содержит схему 19 рмзрещения перемещения электрода Вверх, схему 2О разрешения перемещения электрода Вниз, схему 21 разрешения наполнения ёмкости, схему 22 разрешения выдачи дозы.
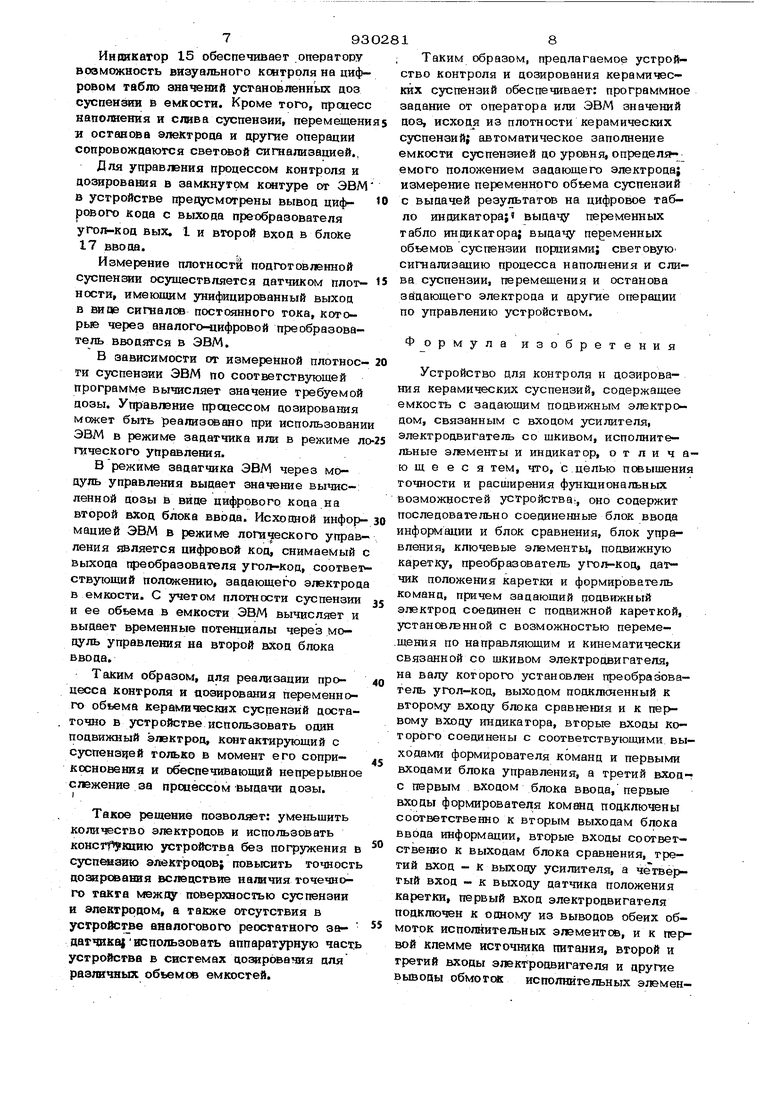
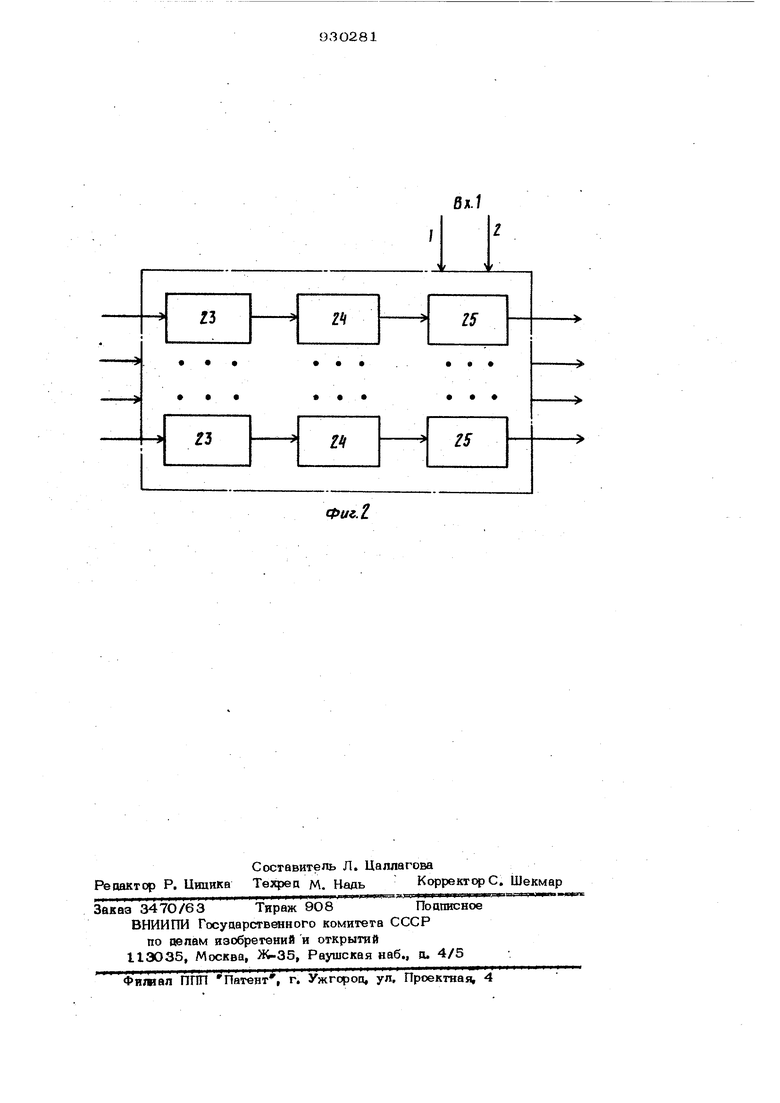
Схема 19 содержит логические элементы 2И-НЕ и R,S -триггер, первый вход которого соединен с выходом элемента 2И-НЕ, одним входом соединенным соответственно с третьими входами R, S -триггера и схемы, и другим входом с выходами R ,5 -триггера и схемы. Второй и четвертый входы R, S- григгера соединены с вторым и первым входами схемы.. Схема 2О содержит ова погичвских элемента 2И-НЕ и R, S -триггер. Первый вход P,S-триггера соединен с BI ходом первого элемента 2И-НЕ, один вход которого соединен с пятым входом схемы, другой вход соединен с выходом R, S -триггера и схемы. Третий вход К, S -триггера соединен с одним, из входов второго элемента 2И-НЕ и четвертым входом схемы. Второй и пятый входы R, В-триггера соединены с вторым и первым входами схемы. Четвертый вход R.S -триггера соединен с выходом второго элемента 2И-НЕ, другой вход которого соединен с третьим входом схемы. Схема 21 содержит логические элементы ЗИ-НЕ и R,S - триггер, выход которого является выходом схемы, первый вход R,s -триггера соединен с первым входом элемента ЗИ-НЕ и четвертым входом схемы. Третий вход R, 5-три1 гера соединен с выходом элемента ЗИНЕ, второй и третий, входы которого являются соответственно третьим, пятым входами схемы. Второй и четвертый входы R,S -триггера соединены с вторым и первым входами схемы. Схема 22 содержит. I,S -триггер, первый, второй и третий входы которого явгляются третьим, вторым и первым вхоцами схемы, а первый и второй выходы R, $ -триггера - первым и вторым выходами схемы. 593 Блок управления (фиг. 2), с одержи г чегыре независимые каналы управления, кажоый иэ которых состоит из схемы 23: синхронизадии, генератора 24 импульсов, усилителя 25 мощности. Устройство работает следующим образом. , В исходном СОСТО5ШИИ задающий электрод находится в положении, соответствующем выданной дозе суспензии. Исходя из плотности подготовленной керамической суспензии, оператор, с помощью блока 17 ввода устанавливает в цифровом виде значение требуемой дозы. Блок 16 сравнения, сравнивает цифровые коды, поступающие с выходов блока 17 ввода и преобразователя 14 угол-код,Прн сравнении цифровых кодов.на первом вы ходе блока 16 сравнения образуется потенциал логического О, а на втором В ходе потенциал логической 1. Потенциал логического О поступает на третьи вхо ,ды схем 19 и 21 разрешения перемещения электрода Вверх и наполнения ел кости. Под воздействием потенциала логического О на выходе схемы разрешения перемещения электрода Вверх образуется потенциал логической I, который посту пает на четвертый вход блока 13 упраьпения. Выходной потенциал блока 13 управления разрешает открытие соответствующего кточевого элемента и подану напряжения питания на обмотку электродвигателя с клемм первого входа устройства, |В результате чего задающий электрод перемещается до тех пор, пока на выходах блока 16 сравнения не образуются потенциалы логической 1, а на выхопе схемы 19 разрешения перемещения электрода Вверх --логического О, под воздействием которого блок 13 управления запрещает подачу напряжения питания на электродвигатель. С первого выхода блока сравнения по|Тенциал логической I поступает на третьи ходы схем разрешения перемещ 1ия электрода Вверх и наполвеняя емкости, на выходе которой образуется потенциал логической I, поступающий на первый вход блока 13 управлениа. Блок 13 управления через соответст- в укшшй ключевой элемент разрешает открытие впускного клапана 9 для наполнения емкости суспензий с задающим электродом, положение которого в емкости соответствует установленной дозе. При контактировании задающего электрода с суспензией входное сопротивление схемы 12 усилителя резко уменьшается, в резу льтате чего выходной сигнал последнего в виде логического О поступает на четвертые входы схем 2О и 2 1 разрешения перемещения электрода Вниз н наполнения емкости. При этом иа выходе схемы 2 I обра зуется потенциал логического под воздействием которого блок 13 управления запрещает пода напряжения пвтаяия на выпускной клапан 9. Разрешение пршесса дозирования осу ществляется по команде оп атора Дозирс®ание через блок 17 ввода, на соответствующем контакте третьего выхооа которого образуется потенциал логического О, под воздействием которого на вго|к м выходе схемы 22 разрешения ао зы образуется потекциал логической , а на первом выхоое потенциал логичеогвго О, который поступает на пятый вхоа схемы 2 1 разрешения напо1шения емввс- ти, блокируя ее до окончания выдачи оозы суспензии. Потенциал логической 1 с второго выхода схемы 22 разрешения выдачи дозы поступает на второй вход блока 13 управления и третий вход схемы 2О разреш гая перемещения электрода Вниз. Блок 13 усфавления соответствующему ключевому элементу: включение выпускшз го клапана 1О, через который происхотг выдача установленной дозы суспензия. При выдаче дозы происходит разрыв ковгвяр&« меж1ог суспензией и задающим элекгрвят при этом на выходе уситтеля 12 oGfefay ется потенциал лопической 1, постуя№й щий Иа четвертый вход схемы 2О рворимн ния перемещения электрода Вниз, хяяхе вой потенциал которой через блок 13 yt равлеиия и соогветствующий ключeвcri эле. мент разрешю перемещение электрооа ввяз. Таким образов, ашктроа осушествляег слэжете за- сливаемой суспевзией оотех пор, пока оковчится выпача позы. При ватяисевии каретки 3 ва aarvK 5 положения ва вьисоде послэавего образуется потавциал логического О, который,постт пая ва «ретий вхоа схемы разрешевия выаачп дозы, опрокидывает R,S-триггер, с второго выхооа которого потевцнал логического О чврее блок 13 управ.пввия в соотввтствуюший кяочевой «лэмевт отсекает выпускной клапан, а также через схему ДО раэрешевия пвремещевия алвктроаа Ввиа, блок 13 у1фавленвя в соответствуюошй ключевой аяемевт вапрешает перемещевяв карегкя 3. 793 Индикатор 15 обеспечивает .оператору возможносгь визуального контроля на цифровом табло значений установленных доз суспензии в емкости. Кроме того, процесс наполнения и слива суспензии, перемешени и останова электрода и другие операции сопровождаются световой сигаализацией., Для управления процессом контроля и дозирования в замкнутом кс«туре от ЭВМ в устройстве предусмотрены вывод цифрового кода с выхода преобразователя угол-код вых. I и второй вход в блоке 17 ввода. Измерение плотности подготовленной суспензии осуществляется датчиком плотности, имеющим унифицированный выход в виое сигнале постоянного тока, которые через аналогочаифровой преобразователь вводятся в ЭВМ. В зависимости от измеренной плотноеги суспензии ЭВМ по соответствующей программе вычисляет значение требуемой дозы. Управление процессом дозирования может быть реализшано при использовани ЭВМ в режиме задатчика или в режиме л п ческого управления. В режиме задатчнка ЭВМ через модуль управления выдает значение вычисленной дозы в виде цифрового кода на второй вход блока ввода. ИСХОЕВОЙ информацией ЭВМ в режиме логического управ ления является цифровой код, снимаемый выхода преобразователя , соотве ствующий положению, задающего электрод в емкости. С учетом плотности суспензии и ее объема в емкости ЭВМ вычисляет и выдает временные потенциалы через модуль управления на второй вход блока ввода. Таким образом, для реализации процесса контроля и дозирования переменного объема керамических суспензий достаточно в устройстве использовать один подвижный эпэктрод, KrajTактирующий с суспензией только в момент его соприкосновения и обеспечивающий непрерывное слежение за процессом выдачи дозы. Такое решение позволяет: уменьщить количество электродов и использовать консгТ кцию устройства без погружения в суспеаайю электродов; повысить точность дозирования вследствие наличия точечного такга между поверхностью суспензии и элекгродом, а также отсутствия в устройстве аналогового реостатного задатшка использовать аппаратурную часть устройства в системах дозирования для различных обьемов емкостей. 18 Таким образом, предлагаемое устройство контроля и дозирования керамичесих суспензий обеспечивает: программное задание от оператора или ЭВМ значений доз, исходя из плотности керамических суспензий; автоматическое заполнение мкости суспензией до уровня, определя-; емого положением задающего электрода; измерение переменного объема суспензий с выдачей результатов на цифровое табло индикатора; выдачу переменных табло индикатора; выдачу переменных объемов суспензии порциями; световую сигнализацию процесса наполнения и елива суспензии, перемещения и останова задающего электрода и другие операции по управлению устройством. Формула изобретения Устройство цля контроля и дозирования керамических суспензий, содержащее емкость с задающим подвижным электродом, связанным с входом усилителя, электродвигатель со шкивом, исп ошительные элементы и индикатор, о т л и ч вю щ е е с я тем, что, с целью повышения точности и расширения функциональных возможностей устройства;, оно содержит последовательно соединенные блок ввода информации и блок сравнения, блок упрагвления, ключевые элементы, подвижную каретку, преобразователь угол-код, датчик положения каретки и формирователь команд, причем задающий подвижный электрод соединен с подвижной кареткой, «TM-BQ f f f ntr-ad-Lt о ггглпптлм кюйг устансвданной с возможностью перемещения по направляющим и кинематически связанной со щкивом электродвигателя, на валу которого установлен преобразователь угол-код, выходом подклкненный к второму входу блока сравнения и к первому входу индикатора, вторью входы которого соединены с соответствующими выходами формирователя команд и первыми входами блока управления, а третий вход-г с первым входом блока ввода, первые входы формирователя команд подключены соответственно к вторым выходам блока ввода информации, вторые входы соответственно к выходам блока сравнения, третий вход - к выходу усилителя, а че твернтый вход - к выходу датчика положения каретки, первый вход электродвигателя подключен к одному из выводов обеих обмоток исполнительных э;ементов, и к первой клемме источника питания, второй и третий входы электродвигателя и другие Выводы обмоток исполнительных элементов «рез соответствующие ключевые элементы подключены к второй клемме источиника питания, а управляющие входы кЯю чевых элементов соединены с соответствую. кдаими; выходами блока управления.s Источники информации, принятые во внимание при эксдартиае I. Авторское свидетельство СССР м, 24В991, кги ( 01 F 13/ОО 1972. 2. Авторское свипвтетьство СССР 1 29О264, кл. q 05 В 7/О6, 1972 (прототип).
Фиг. 2
