Изобретение относится к автоматизации процессов объемного иэмере ния и дозирования жидких сред, и может быть использовано в химической, медицинской и других отраслях промышленности при смешивании жидких сред в различных пропорциях, где требуется повьш енная точность дозирования компонентов смеси.
Известно устройство для управления потоком жидкости, содержащее блок формирования кода, блок формирования сигналов управления, блок выбора программа и блок задания последовательности моментов времени исполнения команд, вход которого соединен с первым выходом блока формирования кода, первый выход подключен к первому входу блока формирования кода, второй - к перг ному входу блока формирования сиг-, нала управления, а третий - ко второму входу блока формирования кода и к выходу блока выбора программы, подключенного ОБОИМ выходом ко второму входу блока формирования сигналов управления, третий вход которого соединен с другим выходом блока формирования кода 11.
Недостатками этого устройства являются его сложность, ограниченные функциональные возможности и низкое быстродействие, так как совокупность присущих.ему блоков по существу представляет собой вычислительную машину и сложный технологический блок. Кроме того, это устройство может функционировать
o в том случае, когда заранее известна временная диаграмма включения и Ьтключения исполнительных механизмов, что не всегда возможно при реализации сложных методик, разведе5ния и смешивания жидких сред и требует изменения всей рабочей программы при изменении последовательности включения исполнительных механизмов.
0
Наиболее близким к предлагаемому 110 технической сущности является устройство для программного управления потоком жидкости, содержащее
5 компрессор, вакуумный насос, последовательно .соединенные первые приводы, дозирующие исполнительные элементы и импульсные датчики пере,мещения, последовательно соединенные второй привод, концевой пере0
ключающий элемент и блок индикации, и последовательно соединенные блок задания программы, согласующий блок управления, дешифратор, коммутатор, третий привод и датчик импульсов, второй выход коммутатора соединен с первыми входами первых приводов, третий выход - со входом второго привода, второй выход блока управления подключен ко входу блока задания программы, а третий выход ко йторому входу блока индикации 2 .
Недостатками этого устройства являются ограниченные функциональные возможности и.низкое быстродействие, так как устройство не позволяет проводить дозирование и смешивание жидких сред по методикам с различными повторяющимися операциями. Кроме того, в этом устройстве исполнительные механизмы могут функционировать только последовательно во времени, так как при одновременной работе нескольких исполнительных элементов не известно время окончания работы каждого из них. .
Цель изобретения - повышение быстродействия и расширение функциональных возможностей устройства.
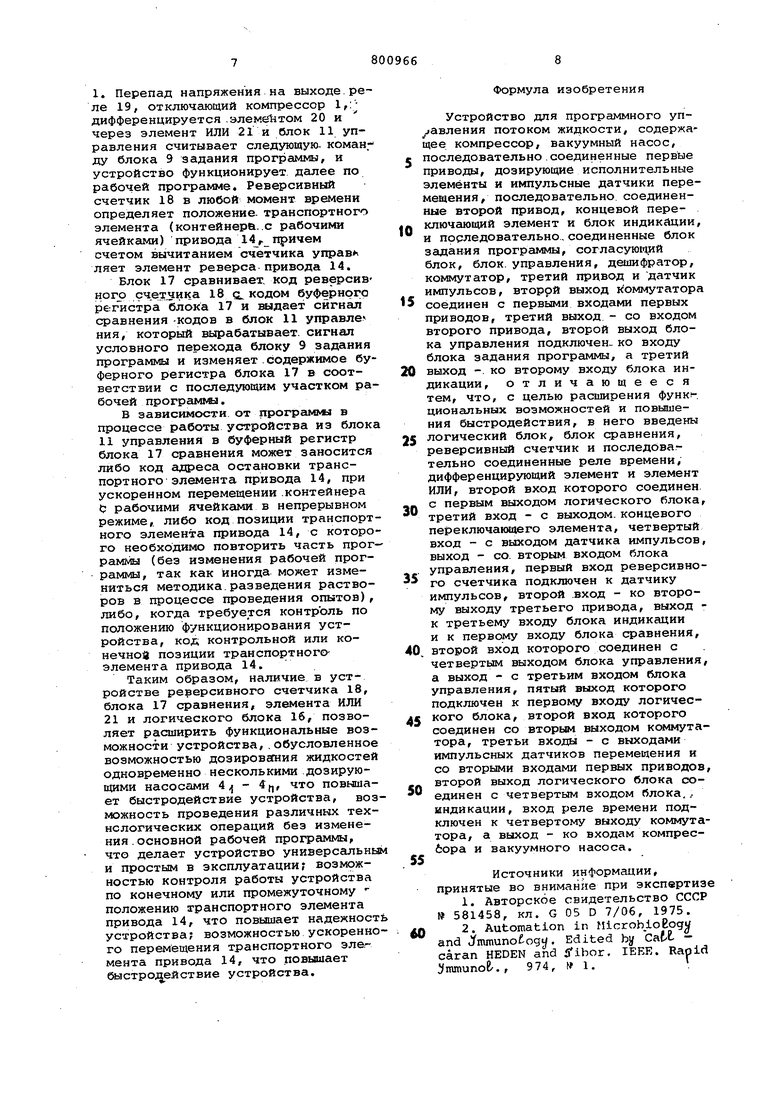
Поставленная цель достигается тем, что устройство дополнительно содержит логический блок, блок сравнения, реверсивный счетчик и последовательно соединенные реле времени дифференцирующий элемент и элемент ИЛИ, второй вход которого соединен с первым выходом логического блока третий вход - с выходом концевого переключающего элемента, четвертый вход - с выходом датчика импульсов, выход,- со вторым входом блока управления, первый вход реверсивного счетчика подключен к датчику импульсов, второй вход - ко второму выходу третьего привода, выход - к третьему входу блока индикации и к первому входу блока сравнения, второй входкоторого соединен с четвертым выходом блока управления, а выход - с третьим входом блока управления, пятый выход которого подключен к первому входу логического блока, второй вход которого соединен со вторым выходом коммутатора, третьи входы - с выходами импульсных датчиков перемещения и со вторыми входами первых приводов, второй выход логического блока соединен с четвертым входом блока индикации, вход реле времени подключен к четвертому выходу коммутатора, а выход ко входам компрессора и вакуумного насоса.
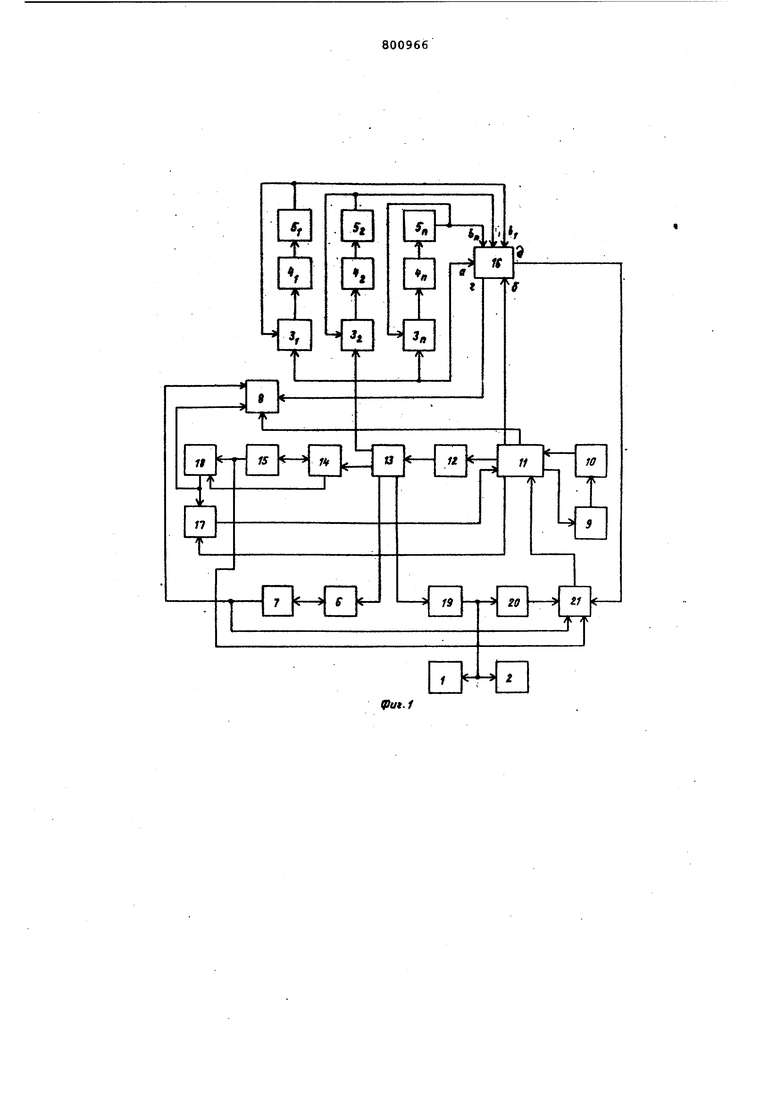
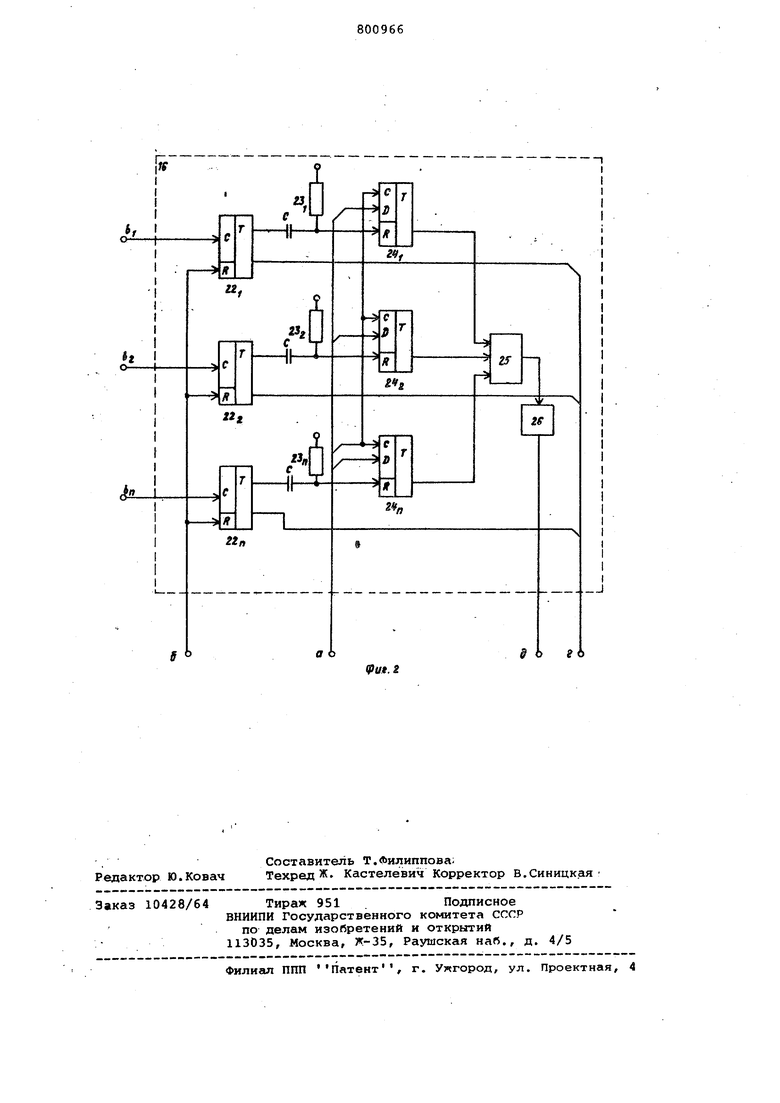
На фиг. 1 показана функциональная схема устройства; на фиг. 2 функциональная схема логического блока.
Устройство содержит компрессор 1, вакуумный насос 2, первые приводы З - 3 , дозирующие исполнительные элементы 4 у( - 4, импульсные датчики перемещения 5 - 5, второй привод 6, концевой переключающий элемент 7, блок 8 индикации, блок 9 задания программы, согласующий блок 10, блок 11 управления, дешифратор 12,, коммутатор 13, третий привод 14, датчик 15 импульсов, логический блок 16, имеющий входы О, б ,. Ь и &п выходы fr и г., блок 17 сравнения. реверсивный счетчик 18, реле 19 времени дефференцирующий элемент 20 и элемент ИЛИ 21. Для простоты не указаны цепи сброса цифровых элементов устройства в нулевое положение.
Блок триггеров 16 содержит делители частоты 22;| - 22,, дифференцирующие элементы 23 - 23,, триггеры 24 - 24f,, элемент И 25 и формирователь 26 импульсов. Каждый делитель частоты 22 ;( - 22 j, представляет собой триггер, производящий деление на два. Исполнительным .элементом привода 14.является транспортный . механизм, на который устанавливаются контейнеры с рабочими ячейками . Контейнеры перемещаются горизонтально. Исполнительными элементами привода 6 являются полые металлические иглы (пробники), смонтированные на одной плоской ,- которая перемещается вертикально. При опускании платы, пробники, погружаются в рабочие ячейки, находя1чиеся в гнездах контейнера. Емкости для жидкостей и гибкие соединительные трубопроводы на чертеже не показаны.
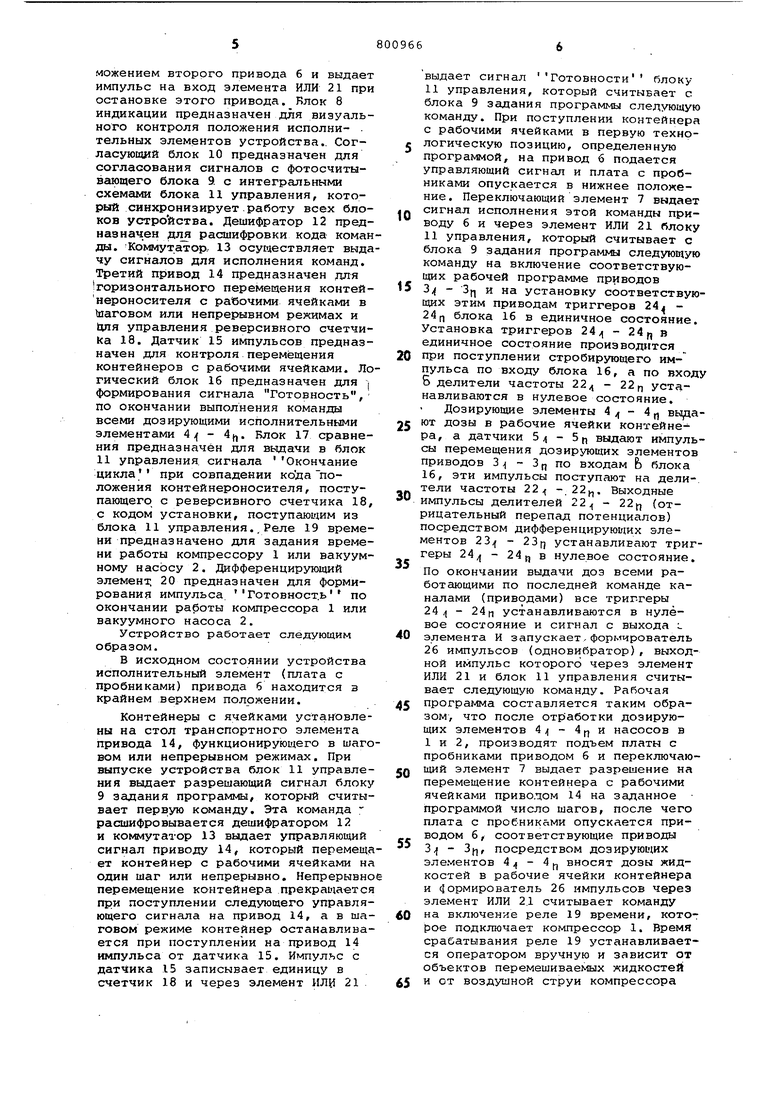
Компрессор 1, представляющий собой воздушный насос, предназначен для перемешивания жидкостей, в рабочих ячейках (воздух заставляет вращаться жидкость в ячейке, чем и достигается ее равномерное перемешивание, причем,при правильном подборе параметров воздушной струи, поверхность перемешиваемой жидкости не разрывается и в ней не появляются воздушные пузырьки). Вакуумный насос 2 предназначен для перераспределения жидкостей в рабочих ячейках Первые приводы 3 - 3 , выполнены реверсивными. Каждый дозирующий исполнительный элемент 4 - 4 выполнен в виде многоканального перис тАльтического насоса. Каждый импульсный датчик перемещения 5 5f предназначен для фиксации положения дозирующего исполнительного элемента 4 - 4 и для выдачи сигнала остановки первому приводу 34 3f,. Второй привод 6 обеспечивает вертикальное реверсивное перемещени платы с пробниками. Концевой переключающий элемент 7 управляет торможением второго привода 6 и выдает импульс на вход элемента ИЛИ 21 при остановке этого привода. Клок 8 индикации предназначен для визуального контроля положения исполни- . тельных элементов устройства.. Согласующий блок 10 предназначен для согласования сигналов с фотосчитывающего блока 9. с интегральными схемами блока И управления, который синхронизирует работу всех блоков устройства. Дешифратор 12 предназначен для расшифровки кода команды. Коммутатор.. 13 осурдествляет выдачу сигналов для исполнения команд. Третий привод 14 предназначен для горизонтального перемещения контейнероносителя с рабочими ячейками в Маговом или непрерывном режимах и идя управления реверсивного счетчиka 18. Датчик 15 импульсов предназначен для контроля перемещения контейнеров с рабочими ячейками. Логический блок 16 предназначен для | формирования сигнала Готовность, по окончании выполнения команды всеми дозирующими исполнительными элементами 4 - 4,. Блок 17 сравнения предназначен для выдачи в блок 11 управления, сигнала Окончание -цикла при совпадении кода положения контейнероносителя, поступающего с реверсивного счетчика 18, с кодом установки, поступающим из блока 11 управления.,Реле 19 времени предназначено для задания времени работы компрессору 1 или вакуумному насосу 2. Дифференцирующий элеменч; 20 предназначен для формирования импульса. Готовность по окончании работы компрессора 1 или вакуумного насоса 2.
Устройство работает следующим образом.
В исходном состоянии устройства исполнительный элемент (плата с пробниками) привода б находится в крайнем верхнем положении.
Контейнеры с ячейками установлены на стол транспортного элемента привода 14, функционирующего в шаговом или непрерывном режимах. При выпуске устройства блок 11 управления выдает разрешающий сигнал блоку 9 задания программы, который считывает первую команду. Эта команда расшифровывается дешифратором 12 и коммутатор 13 выдает управляющий сигнал приводу 14, который перемещает контейнер с рабочими ячейками на один шаг или непрерывно. Непрерывно перемещение контейнера прекращается при поступлении следующего управляющего сигнала на привод 14, а в шаговом режиме контейнер останавливается при поступлении на привод 14 импульса от датчика 15. Импульс с датчика 15 записывает единицу в счетчик 18 и через элемент ИЛИ 21
выдает сигнал Готовности блоку 11 управления, который считывает с блока 9 задания программы следующую команду. При поступлении контейнера с рабочими ячейками в первую техирJ логическую позицию, определенную програкмой, на привод 6 подается управляющий сигнал и плата с пробниками опускается в нижнее положение . Переключающий элемент 7 выдает Q сигнал исполнения этой команды приводу 6 и через элемент ИЛИ 21 блоку 11 управления, который считывает с блока 9 задания программы следующую команду на включение соответствующих рабочей программе приводов 3 - 3 и на установку соответствующих этим приводам триггеров 24 24п блока 16 в единичное состояние. Установка триггеров 24 - 24f, в единичное состояние производится 0 при поступлении стробирующего импульса по входу блока 16, а по входу о делители частоты 22 - 22 устанавливаются в нулевое состояние.
Дозирующие элементы 4 - 4 выра5 гот дозы в рабочие ячейки контейнера, а датчики 5;( - 5 выдают импульсы перемещения дозирующих элементов приводов 3 - 3q по входам Ь блока 16, эти импульсы поступают на делители частоты 22 -. 22,. Выходные импульсы делителей 22 - 22f, (отрицательный перепад потенциалов) посредством дифференцирующих элементов 23 - 23fj устанавливают триггеры 24 - 24 {, в нулевое состояние.
5 По окончании выдачи доз всеми работающими по последней команде каналами (приводами) все триггеры 24 ;( - 24 п устанавливаются в нулевое состояние и сигнал с выхода L 0 элемента И запускает,формирователь 26 импульсов (одновибратор), выходной импульс которого через элемент ИЛИ 21 и блок 11 управления считывает следующую команду. Рабочая 5 программа составляется таким образом, что после отработки дозирующих элементов 4 - 4р и насосов в 1 и 2, производят подъем платы с пробниками приводом 6 и переключаюn щий элемент 7 выдает разрешение на перемещение контейнера с рабочими ячейками приводом 14 на Зсщанное программой число шагов, после чего плата с пробник&ми опускается приводом 6, соответствующие приводы 3 - 3, посредством дозирующих
элементов 4 - 4 f., вносят дозы жидкостей в рабочие ячейки контейнера и |ормирователь 26 импульсов через элемент ИЛИ 2.1 считывает команду 0 на включение реле 19 времени, которое подключает компрессор 1. Время срабатывания реле 19 устанавливается оператором вручную и зависит от объектов перемешиваемых жидкостей 5 и от воздушной струи компрессора
1. Перепад напряжения на выходе. реле 19, отключающий компрессор ,: дифференцируется .элементом 20 и через элемент ИЛИ 21 и блок 11 управления считывает следующую- коман.ду блока 9 задания программы, и устройство функционирует далее по рабочей программе. Реверсивный счетчик 18 в любой момент времени определяет положение, транспортного элемента (контейнера..с рабочими ячейкёшм) привода 14,, причем счетом вычитанием счетчика управл ляет элемент реверса привода 14,
Блок 17 сравнивает, код реверсив ног) счетчика 18 SL кодом буферного реггистра блока 17 и выдает сигнал сравнения -кодов в блок 11 управле ния, который вырабатывает, сигнал условного перехода блоку 9 задания программы и изменяет,содержимое буферного регистра блока 17 в соответствии с последующим участком рабочей программа.
В зависимости, от программа в процессе работы устройства из блок 11 управления в буферный регистр блока 17 сравнения может заносится либо код адреса остановки транспортного элемента привода 14, при ускоренном перемещении .контейнера t рабочими ячейками в непрерывном режиме, либо код позиции транспортного элемента привода 14, с которого необходимо повторить часть прог рамгиы (без изменения рабочей программы, так как иногда может измениться методика.разведения растворов в процессе проведения опытов), либо, когда требуется контроль по положению функционирования устройства, код контрольной или конечной позиции транспортного элемента привода 14,
Таким образом, наличие в устройстве реверсивного счетчика 18, блока 17 сравнения, элемента ИЛИ 21 и логического блока 16, позволяет расширить функциональные возможности устройства,,обусловленное возможностью дозироветия жидкостей одновременно несколькими дозирующими насосами 4 - 4,, что повышает быстродействие устройства, возможность проведения различных технологических операций без изменения, основной рабочей программы, что делает устройство универсальны и простым в эксплуатации возможностью контроля работы устройства по конечному или промежуточному положению транспортного элемента привода 14, что повышает надежност устройства; возможностью ускоренного перемещения транспортного зле мента привода 14, что повышает аястро;}ействие устройства.
Формула изобретения
Устройство для программного уп авления потоком жидкости, содержащее компрессор, вакуумный насос, последовательно.соединенные первые приводы, дозирующие исполнительные элементы и импульсные датчики перемещения, последовательно соединенные второй привод, концевой переключающий элемент и блок индикации, и последовательно,соединенные блок задания программы, согласующий блок, блок, управления, дешифратор, коммутатор, третий привод и датчик импульсов, второй выход коммутатора
5 соединен с первыми входами первых приводов, третий выход. - со входом второго привода, второй выход блока управления подключен., ко входу блока задания программы, а третий
0 выход -, ко второму входу блока индикации, отличающееся тем, что, с целью расширения . циональных возможностей и повышения быстродействия, в него введены логический блок, блок сравнения,
5 реверсивный счетчик и последовательно соединенные реле времени, дифференцирующий элемент и элемент ИЛИ, второй вход которого соединен с первым выходом логического блока,
0 третий вход - с выходом, концевого переключакнцего элемента, четвертый вход - с выходом датчика импульсов, выход - со. вторым входом блока управления, первый вход реверсивно5го счетчика подк,пючен к датчику импульсов, второй вход - ко второму выходу третьего привода, выход к третьему входу блока индикации и к первому входу блока сравнения,
0, второй вход которого соединен с четвертым выходом блока управления, а выход - с третьим входом блока управления, пятый выход которого подключен к первому входу логического блока, второй вход которого
5 соединен со вторьм выходом кс 1мутатора, третьи входы - с выходами импульсных датчиков перемещения и со вторыми входами первых приводов, второй выход логического блока со0единен с четвертым входом блока,.. индикации, вход реле времени подключен к четвертому выходу коммутатора, а выход - ко входам компресйора и вакуумного насоса.
5
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 581458, кл. G 05 D 7/06, 1975.
2.Automation in Microh.ioEog
О and Jmmunotogi/. Edited bj/ Catt caran HEDEN and ifihor. IEEE. Rapid i mmunot., 974, 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тестового контроля цифровых вычислительных машин | 1981 |
|
SU964647A1 |
| Система автоматического управления процессом крашения | 1987 |
|
SU1527344A1 |
| Устройство для испытания химических соединений на ферментативную активность | 1978 |
|
SU748249A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство для биологических испытаний веществ | 1983 |
|
SU1129522A1 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Устройство для испытания химических соединений | 1981 |
|
SU981888A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |