УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО
I
Изобретение относится к машиностроению, конкретно к механизмам, преобразующим вращательное движение а поступательное и может быть использовано в приборостроении и станкостроении.
Известно устройство для преобразования вращательного движения в винтовое, содержащее гладкий вал,под шипники качения, расположенные неподвижно под углом к беи вала, и прижимающиеся таким образом к его поверхности, что площадка контакта расположена по винтовой линии, имеющей постоянный шаг l .
Недостаток указанного устройства - невозможность бесступенчатого регулирования скорости поступательного перемещения, а также реверсирование при неизменном вращении винта.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату является ДВИЖЕНИЯ В ВИНТОВОЕ
устройство для преобразования вращательного движения в винтовое, содержащее корпус, размещенный в нем гладкий вал, ведущий ролик, взаимодействующий с последним посредством бесконечного ремня 2.
Недостаток указанного устройства - узкий диапазон регулирования скорости поступательного перемещения и непостоянность передаточного
10 отношения в процессе эксплуатации, что сужает технологические возможности устройства.
Цель изобретения - расширение технологических возможностей устройстISва.
Указанная цель достигается тем, что устройство снабжено дополнительным упорным роликом, опирающимся на ремень, Двумя управляющими
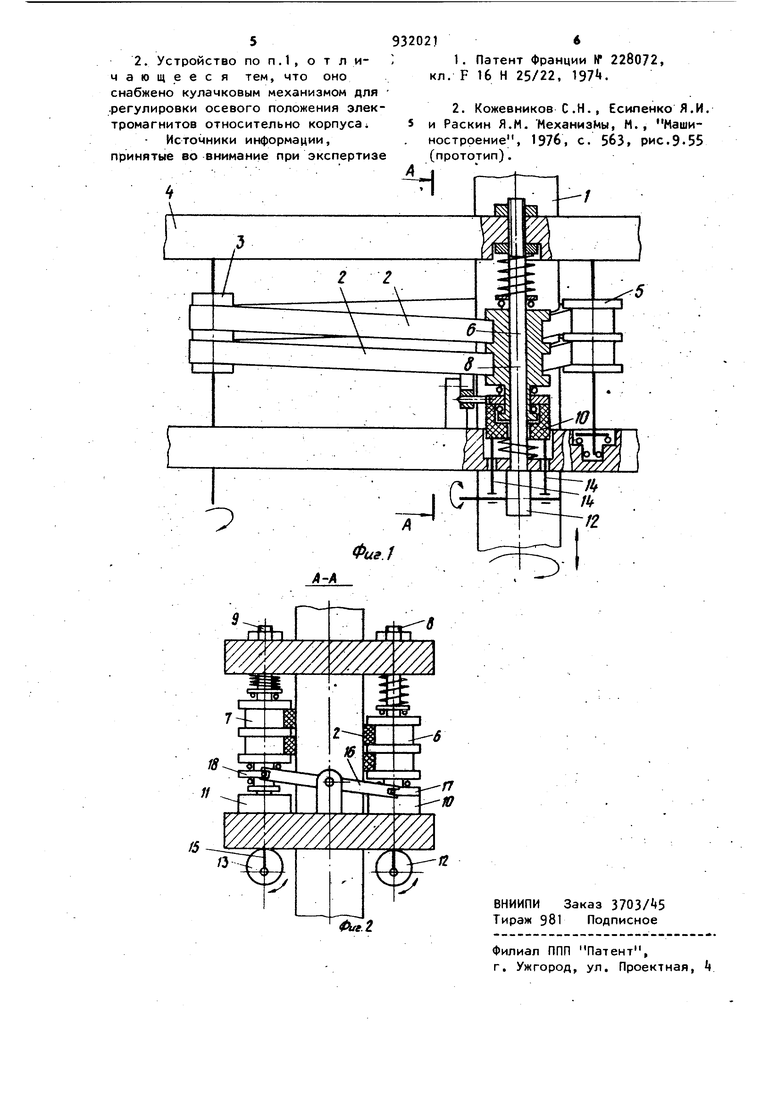
10 роликами, установленными на валу диаметрально противоположно с возможностью осевого перемещения вдоль него, электромагнитами, воздей3ствующими на управляющие ролики и связывающие последние коромыслом. Кроме того, устройство снабжено кулачковым механизмом для регулировки осевого положения электромагнитов относительно корпуса. На фиг. 1 изображено устройство для преобразования вращательного дв жения в винтовое; на фиг. 2 - разрез А-А на фиг.1. , Устройство для преобразования вр щаЧельного движения в винтовое содержит гладкий вал 1 , бес1 сонечный ремень 2, ведущий ролик 3, корпус k, упорный ролик 5, опирающийся на ремень 2, управляющие ролики 6 и 7, свободно посаженные на осях 8 и 9 и перемещающиеся вдоль вала 1 от электромагнитов 10 и 11, имеющих во можность в свою очередь изменять по ложение относительно корпуса 4 от кулачковых механизмов для регулиров ки осевого положения электромагнито в корпусе, включающи эксцентрики 12 и 13 и тяги Н и 15. Управляющие ролики 6 и 7 связаны между собой че рез коромысло 16 и упорные кольца 1 и 18 таким образом, что при опускании одного из них второй поднимается. , Устройство для преобразования вращательного движения в винтовое работает следующим образом. При включении одного из электромагнитов, например 10, он притягивает упорное кольцо 17, которое в свою очередь тянеТ вниз управляющий ролик 6 и связанную с ним ветвь бес конечного ремня 2. В это время второй управляющий ролик 7 приподымается вверх, а вметё с ними обратная
ветвь бесконечного ремня 2.Таким образом, контакт бесконечного ремня 2 с гладким валом 1 осуществляется по винтовым линиям, и при вращении ведущего ролика 3 (но выключенном электромагните 10) управтгйющий ролик 7 опускается вниз, а ролик 6 подымается. Это обеспечивает изменение угла наклона контакта бесконечного ремня 2 с гладким валом 1 в противоположнук; сторону,, и при вращении ведущего ролика 3 в ту же сторону гладкий вал 1 изменяет направление поступательного перемещения.
Изменение положения электромагнитов 10 и 11 относительно корпуса
1. Устройство,для преобразования вращательного движения в винтовое, содержащее корпус,. размещенный в нем гладкий вал, ведущий ролик, взаимодействующий с последним посредством бесконечного ремня, о т л ичающееся тем, что, с целью расширения технологических возможностей механизма, оно снабжено дополнительным упорным роликом, опирающимся на ремень, двумя управляющими роликами, установленными на валу ди.аметрально противоположно с возможностью осевого перемещения вдоль него, воздействующими на управляющие ролики электромагнитами и связывающие последние коромыслом. 1 осуществляется поворотом эксцентриков 12 и 13, это обеспечивает изменение величины отклонения роликов от контррльнрго положения, что означает изменение угла наклона контакта бесконечного ремня 2 с галкдим валом 1, т.е. происходит бесступенчатое регулирование скорости поступательного перемещения гладкого вала 1. При различном угле разворота эксцентриков 12 и 13 можно обеспе- чить в одном направлении медленную рабочую подачу, а при-реверсировании - быструю (при одном и том же направлении вращения). Это особенно важно для приводов подач металлорежущих станков. Осевое усилие в данном механизме на вал передается от упорного ролика 5 и двух управляющих роликов- 6 и 7, наличие которых в данном устройстве обеспечивает постоянное передаточное отношение в процессе эксплуатации за счет постоянного угла наклона бесконечного ремня 2 относительно гладкого вала 1, обеспечиваемого определенным положением управляющих роликов 6 и 7 Экономический эффект предлагаемого устройства для преобразования вращательного движения в винтовое заключается в широком диапазоне регулирования и за счет постоянства передаточного отношения в процессе эксплуатации, что значительно расширяет технологические возможности предлагаемого устройства и область его применения. Формула изобретения
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОБЛОК С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ПОСТУПАТЕЛЬНОЙ СКОРОСТИ | 2015 |
|
RU2602438C1 |
| БЕССТУПЕНЧАТЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2221946C2 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1984 |
|
SU1239043A1 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| Автоматический клиноременный вариатор скорости | 1989 |
|
SU1758316A1 |
| АВТОМАТИЧЕСКИЙ ПЕРЕНАЛАЖИВАЕМЫЙ ФРИКЦИОННЫЙ КЛИНОРЕМЕННЫЙ ВАРИАТОР | 2011 |
|
RU2489622C1 |
| Коляска для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688288C1 |
| Устройство для преобразования вращательного движения вала в винтовое | 1944 |
|
SU66592A1 |
| Бесступенчатый привод транспортного средства | 2020 |
|
RU2737407C1 |
| ПНЕВМАТИЧЕСКИ ПРИВОДИМАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2013 |
|
RU2653333C2 |
