Изобретение относится к сельскохозяйственному машиностроению, в частности к средствам малой механизации с приводом от двигателя внутреннего сгорания или электродвигателя, и может быть использовано для выполнения различных технологических операций с навесным или прицепным оборудованием в приусадебных и фермерских хозяйствах, коммунально-хозяйственных службах.
Известна самоходная почвообрабатывающая фреза, содержащая электродвигатель, расположенный на соединенной с корпусом полураме, на центральном валу которого установлены предохранительная муфта, кинематически связанная цепной передачей с валом электродвигателя, коническая шестерня, кинематически связанная с зубчатым коническим колесом, установленным на приводном валу с закрепленными на его концах рабочими органами, и свободно вращающийся полый вал с закрепленным на нем червяком, который кинематически связан с червячным колесом, установленным на полуоси с закрепленными на ее концах ходовыми колесами. На одном из концов полого вала установлен ведомый шкив клиноременного вариатора, кинематически связанный клиновым ремнем с ведущим шкивом, установленным на валу электродвигателя. Механизм для регулирования передаточного отношения клиноременного вариатора включает расположенные в осевых отверстиях неподвижной части ведущего шкива толкатели, соприкасаемые с одной стороны с подвижной частью шкива, а с другой стороны шарнирно при помощи осевого подшипника соединенные с подвижно установленным на резьбовом участке промежуточного вала с маховичком, при этом промежуточный вал соединен одним концом шарнирно при помощи радиального подшипника с валом электродвигателя, а другим концом жестко с полурамой. (RU, 144732, МПК А01В 33/012, опубл. 27.08.2014).
Недостатком известной фрезы является отсутствие возможности автоматического регулирования клиноременного вариатора и поступательной скорости почвообрабатывающей фрезы в зависимости от определенных ее режимов работы.
Известна почвообрабатывающая фреза, включающая электропривод, расположенный на корпусе, на центральном валу которого установлены предохранительная муфта, коническая шестерня, кинематически связанная с зубчатым коническим колесом, установленным на полуосях с фрезерными рабочими органами, и червяк, кинематически связанный с червячным колесом, установленным на полуосях с ходовыми колесами, дополнительно снабжена клиноременным вариатором, состоящим из ведущего шкива с механизмами регулировки и управления, закрепленными на промежуточном валу, жестко соединенным с валом электродвигателя, и ведомого шкива, кинематически связанного клиновым ремнем с ведущим шкивом, при этом червяк жестко установлен на полом валу, шарнирно установленном на центральном валу. Ведущий шкив клиноременного вариатора содержит неподвижный и подвижный диски, установленные на промежуточном валу. Ведомый шкив клиноременного вариатора содержит неподвижный и подвижный диски, пружину, установленные на полом валу. Механизм регулировки клиноременного вариатора содержит маховичок, установленный на резьбовом участке промежуточного вала, и пружину, которая с одной стороны соприкасается с маховичком, а с другой - с подвижным диском ведущего шкива. Механизм управления клиноременного вариатора содержит установленные на промежуточном валу ведомый кулачок со звездочкой, ведущий кулачок и толкатели, установленные в осевых отверстиях неподвижного диска ведущего шкива и соприкасаемые с одной стороны с ведущим кулачком, а с другой - с подвижным диском ведущего шкива (RU, 2419269, МПК А01В 33/06, опубл. 27.05.2011).
Недостатком известного решения является отсутствие возможности ручного регулирования клиноременного вариатора и установления фиксированной поступательной скорости почвообрабатывающей фрезы определяемой конкретным режимом ее работы.
Наиболее близким по технической сущности является мотоблок, содержащий раму, на которой смонтированы рукоятки руля с органами управления, двигатель и редуктор с ходовыми колесами, связанные между собой клиноременной передачей с механизмом сцепления в виде натяжного ролика приводного ремня, охватывающего ведущий и ведомый шкивы установленные соответственно на валу двигателя и на входном валу редуктора, также на валу двигателя дополнительно установлен шкив отбора мощности (Руководство по эксплуатации мотоблока «Нева» МБ-2 и его модификаций. Закрытое акционерное общество «Красный Октябрь - Нева», Санкт-Петербург, 2011, с. 11).
Недостатком известного мотоблока является ограничение выбора передач, обеспечивающих необходимую поступательную скорость движения мотоблока и отсутствие возможности бесступенчатого ее регулирования в зависимости от определенных условий работы и значений момента сопротивления на ходовых колесах, что приводит к уменьшению производительности и повышению энергоемкости выполняемой технологической операции.
Технический результат заключается в расширении функциональных возможностей мотоблока, повышении его производительности и снижении энергоемкости выполняемой технологической операции за счет ручного или автоматического регулирования клиноременного вариатора, обеспечивающего бесступенчатое регулирование его поступательной скорости в зависимости от определенных условий работы и значений момента сопротивления на ходовых колесах.
Сущность изобретения заключается в том, что мотоблок включает шкив отбора мощности с расположенными на раме рукоятками руля с органами управления, двигателем, и редуктором с ходовыми колесами и закрепленным на его входном валу ведомым шкивом клиноременной передачи с механизмом сцепления в виде натяжного ролика приводного ремня соединяющего ведомый шкив с ведущим, дополнительно снабжен клиноременным вариатором, состоящим из ведущего шкива с механизмами автоматического и ручного управления, установленными на первом промежуточном валу центральной втулки, жестко соединенном с валом двигателя, и ведомого шкива, кинематически связанного вариаторным ремнем с ведущим шкивом, а также вторым промежуточным валом, на котором закреплены ведомый шкив клиноременного вариатора. Шкив отбора мощности жестко установлен на первом промежуточном валу, а ведущий шкив клиноременной передачи - на втором.
Ведущий шкив клиноременного вариатора содержит вращающуюся относительно первого промежуточного вала центральную втулку с установленными на ней неподвижным и подвижным дисками, с предохраняющими от осевого смещения опорными подшипниками.
Механизм автоматического управления клиноременным вариатором содержит установленные на первом промежуточном валу пружину, соприкасающуюся с одной стороны с закрепленным на первом промежуточном валу упорным стаканом, а с другой с подвижным диском ведущего шкива, подвижную втулку с винтовой канавкой, соединенную с ним при помощи жестко закрепленным на нем радиальным штифтом, входящим в паз винтовой канавки, и упорную вилку, свободно установленную в осевых отверстиях неподвижного диска клиноременного вариатора и жестко закрепленную с одной стороны с его подвижным диском, а с другой с подвижной втулкой.
Механизм ручного управления клиноременным вариатором содержит обойму с резьбовым хвостовиком, соединенную при помощи радиального подшипника с первым промежуточным валом, а резьбовым хвостовиком - жестко с рамой мотоблока и подвижно с установленным на нем маховичком, взаимодействующим при помощи осевого подшипника с подвижной втулкой.
Ведомый шкив клиноременного вариатора содержит неподвижный и подвижный диски, пружину, установленные на втором промежуточном валу, при этом пружина закреплена упорным стаканом.
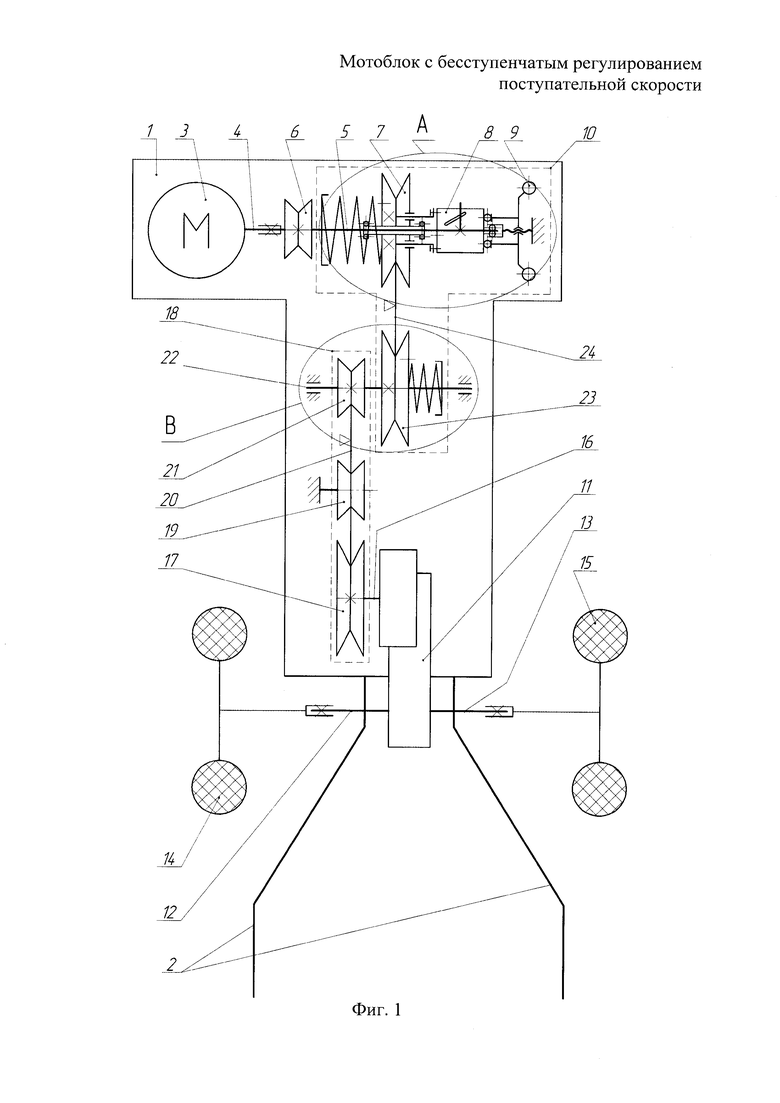
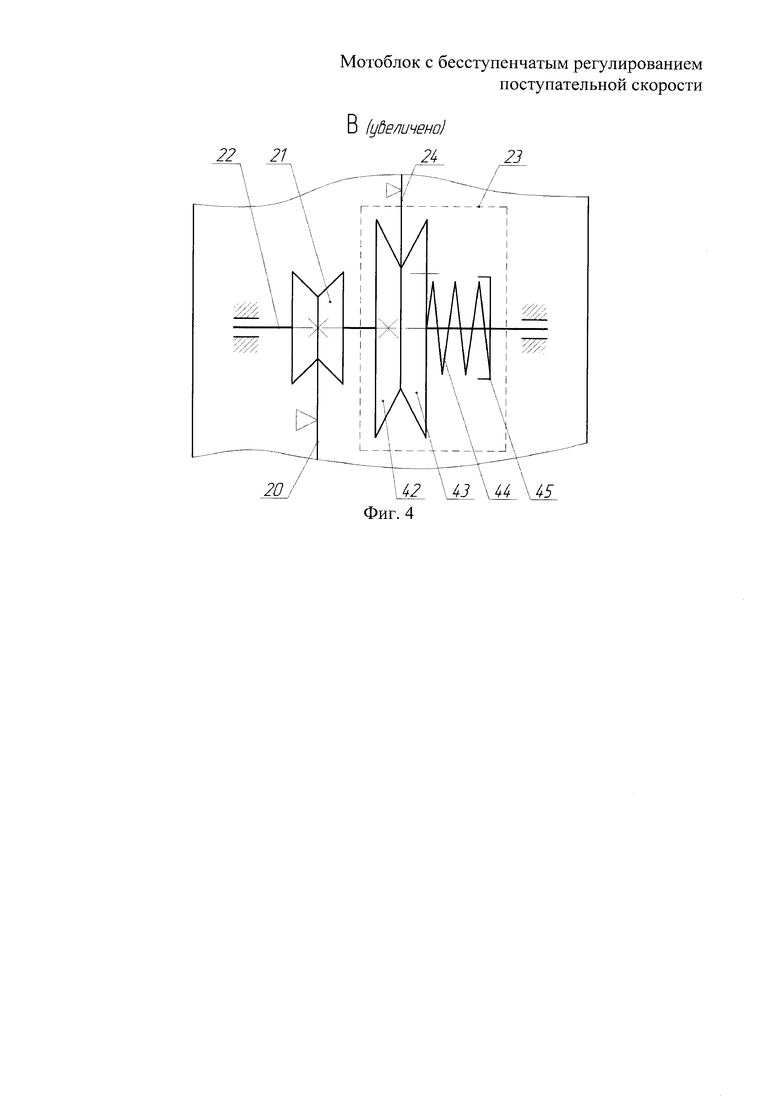
На фиг. 1 изображена схема привода ходовых колес мотоблока; на фиг. 2 схема конструкции ведущего шкива с механизмами автоматического и ручного управления; на фиг. 3 - расположение упорной вилки в неподвижной части ведущего шкива клиноременного вариатора; на фиг. 4 - схема конструкции ведомого шкива клиноременного вариатора.
Мотоблок с бесступенчатым регулированием поступательной скорости содержит размещенные на раме 1 (фиг. 1) рукоятки руля с органами управления 2, двигатель 3, на валу 4 которого жестко закреплен первый промежуточный вал 5 с установленными на нем шкивом отбора мощности 6, ведущим шкивом 7 и механизмами автоматического 8 и ручного 9 управления клиноременного вариатора 10. На раме 1 также, размещен редуктор 11 с закрепленными на его полуосях 12 и 13 ходовыми колесами 14 и 15 и на его входном валу 16 ведомым шкивом 17 клиноременной передачи 18 с механизмом сцепления в виде натяжного ролика 19 приводного ремня 20, соединяющего ведомый шкив 17 с ведущим шкивом 21, размещенным в свою очередь на втором промежуточном валу 22. На валу 22 также установлен ведомый шкив 23 клиноременного вариатора 10 кинематически связанного вариаторным ремнем 24 с ведущим шкивом 7 клиноременного вариатора 10.
Ведущий шкив 7 (фиг. 2) клиноременного вариатора 10 состоит из свободно посаженной на первом промежуточном валу 5 центральной втулки 25 с установленными на ней неподвижным 26 и подвижным 27 дисками. От осевого смещения центральной втулки 25 относительно первого промежуточного вала 5 предохраняют опорные подшипники 28 и 29.
Механизм автоматического управления 8 (фиг. 2) клиноременного вариатора 10 представляет собой установленные на первом промежуточном валу 5 пружину 30, соприкасающуюся с одной стороны с закрепленным на первом промежуточном валу 5 упорным стаканом 31, а с другой - с подвижным диском 27 ведущего шкива 7, подвижную втулку 32 с винтовой канавкой 33, соединенную с ним жестко закрепленным на первом промежуточном валу 5 радиальным штифтом 34, входящим в паз винтовой канавки 33, и упорную вилку 35, свободно установленную в осевых отверстиях 36 (фиг. 3) неподвижного диска 26 клиноременного вариатора 10 и жестко закрепленную с одной стороны с его подвижным диском 27, а с другой - с подвижной втулкой 32.
Механизм ручного управления 9 (фиг. 2) клиноременного вариатора 10 состоит из обоймы 37 с резьбовым хвостовиком 38, соединенной при помощи радиального подшипника 39 с первым промежуточным валом 5, а резьбовым хвостовиком 38 жестко с рамой 1 мотоблока и подвижно с установленным на нем маховичком 40, взаимодействующим при помощи осевого подшипника 41 с подвижной втулкой 32.
Ведомый шкив 23 клиноременного вариатора 10 включает в себя установленные на втором промежуточном валу 22 неподвижный 42 и подвижный 43 диски, а также пружину 44, взаимодействующую с одной стороны с подвижным диском 43, а с другой - с закрепленным на втором промежуточном валу 22 упорным стаканом 45.
Устройство работает следующим образом. Перед началом выполнения технологической операции предварительно осуществляется запуск двигателя и предварительная настройка клиноременного вариатора 10 с учетом ручного 9 или автоматического 8 режимов управления на необходимое передаточное отношение, обеспечивающее определенную требуемую поступательную скорость мотоблока. Запуск двигателя осуществляется при предварительно ослабленном приводном ремне 20, что достигается ослаблением натяжного ролика 19. В этом случае обеспечивается холостой ход клиноременного вариатора 10, характеризующийся отсутствием крутящего момента на его ведомом шкиве 23, установленном вместе с ведущим шкивом 21 клиноременной передачи 18 на втором промежуточном валу 22.
При запуске двигателя 3 вращение с его вала 4 через первый промежуточный вал 5 и радиальный штифт 34, взаимодействующий с винтовой канавкой 33, передается на подвижную втулку 32. Далее через упорную вилку 35 вращение передается на ведущий шкив 7 клиноременного вариатора 10, а затем при помощи вариаторного ремня 24 на его ведомый шкив 23 клиноременного вариатора 10 и через второй промежуточный вал 22 на ведущий шкив 21 клиноременной передачи 18.
При использовании мотоблока с ручным режимом управления клиноременного вариатора 10 его настройка на необходимое передаточное отношение, характерное для определенной поступательной скорости, осуществляется путем вращения маховичка 40 на резьбовом хвостовике 38 механизма ручного управления 9. Для уменьшения поступательной скорости мотоблока маховичок 40 необходимо завинчивать на резьбовом хвостовике 38. При завинчивании маховичка осевое усилие передается через осевой подшипник 41 на подвижную втулку 32, которая под действием осевого усилия будет перемещаться вдоль первого промежуточного вала 5, одновременно совершая вращение за счет взаимодействия ее винтовой канавки 33 с радиальным штифтом 34. Осевое перемещение подвижной втулки 32 через упорную вилку 35 вынуждает подвижный диск 27 ведущего шкива 7 сжать пружину 30 и сдвинуться влево, что приведет к уменьшению его рабочего диаметра. При этом вариаторный ремень 24 начнет заглубляться между неподвижным 26 и подвижным 27 дисками ведущего шкива 7 и его натяжение уменьшится. Вследствие чего подвижный диск 43 ведомого шкива 23 под воздействием предварительно сжатой пружины 44 начнет сближаться с неподвижным диском 42, вызывая увеличение его рабочего диаметра, при этом вариаторный ремень 24 будет выталкиваться из ведомого шкива 23, что приведет к его натяжению и увеличению передаточного отношения клиноременного вариатора 10.
Для начала движения мотоблока необходимо натяжным роликом 19 обеспечить натяжение приводного ремня 20, который сначала передает вращение с ведущего шкива 21 на ведомый шкив 17 клиноременной передачи 18, а затем через входной вал 16 редуктора 11 на полуоси 12 и 13 и ходовые колеса 14 и 15.
В случае же необходимости увеличения поступательной скорости мотоблока требуется отвинчивать маховичок 40. Это позволит освободить подвижную втулку 32 и пружина 30 начнет разжиматься и смещать подвижный диск 27 вправо, что приведет к выталкиванию вариаторного ремня 24 из ведущего шкива 7 и увеличению его рабочего диаметра. За счет этого на ведомом шкиве 23 вариаторный ремень 24 начнет вклиниваться между неподвижным 42 и подвижным 43 дисками, заставляя последнего смещаться вдоль второго промежуточного вала 22 и сжимать пружину 44, что приведет к уменьшению рабочего диаметра ведомого шкива 23 и, следовательно, передаточного отношения клиноременного вариатора 10.
При использовании мотоблока с автоматическим режимом управления клиноременным вариатором его настройка на необходимое передаточное отношение, характерное для определенной поступательной скорости, осуществляется автоматически за счет изменяющегося момента сопротивления на ходовых колесах 14 и 15. Перед использованием мотоблока с данным режимом управления необходимо на холостом ходу клиноременного вариатора 10 предварительно путем вращения маховичка 40 отвести его в крайнее правое положение, что позволит в свою очередь за счет пружины 30 сблизить подвижный диск 27 с неподвижным 26 ведущего шкива 7, обеспечивая при этом выталкивание из него вариаторного ремня 24 и увеличение его рабочего диаметра. Одновременно с этим увеличится натяжение вариаторного ремня 24, и он начнет заглубляться между неподвижным 42 и подвижным 43 дисками ведомого шкива 23. Вследствие чего подвижный диск 43 начнет смещаться вправо, одновременно сжимая пружину 44. Это приведет к уменьшению его рабочего диаметра и передаточного отношения клиноременного вариатора 10. При начале движения мотоблока на его ходовых колесах 14 и 15 возникнет определенное значение момента сопротивления, для преодоления которого на валу 4 двигателя 3 будет возникать приводной крутящий момент. В этом случае приводной крутящий момент от вала 4 при помощи первого промежуточного вала 5, радиального штифта 34, взаимодействующего с винтовой канавкой 33, будет передаваться на подвижную втулку 32 и далее через упорную вилку 35 на ведущий шкив 7 клиноременного вариатора 10, а затем при помощи вариаторного ремня 24 на его ведомый шкив 23 и через второй промежуточный вал 22, клиноременную передачу 18, входной вал 16 редуктора 11 на его полуоси 12 и 13 и на закрепленные на них ходовые колеса 14 и 15.
При передаче крутящего момента от двигателя 3 к ходовым колесам 14 и 15 на вариаторном ремне 24 будет возникать окружное усилие, которое вынудит поворачиваться ведущий шкив 7 с упорной вилкой 35 и подвижной втулкой 32 в направлении, обратном вращению первого промежуточного вала 5. При этом подвижная втулка 32 за счет взаимодействия ее винтовой канавки 33 с радиальным штифтом 34 будет вынуждена перемещаться вдоль первого промежуточного вала 5, воздействуя при этом через упорную вилку 35 на подвижный диск 27 ведущего шкива 7 клиноременного вариатора 10, заставляя его, сжимая пружину 30, сдвигаться влево, что приведет к уменьшению рабочего диаметра ведущего шкива 7. При этом вариаторный ремень 24 начнет заглубляться между неподвижным 26 и подвижным 27 дисками ведущего шкива 7 и его натяжение уменьшится. Вследствие чего подвижный диск 43 ведомого шкива 23 под воздействием предварительно сжатой пружины 44 начнет сближаться с неподвижным диском 42, вызывая увеличение его рабочего диаметра, при этом вариаторный ремень 24 будет выталкиваться из ведомого шкива 23, что приведет к его натяжению и выбору необходимого передаточного отношения клиноременного вариатора 10 за счет изменения его значения в большую сторону. Изменение передаточного отношения клиноременного вариатора 10 будет происходить до тех пор, пока подвижная втулка 32 не перестанет смещаться вдоль первого промежуточного вала 5 относительно радиального штифта 34. Ограничение смещения подвижной втулки 32 относительно штифта 34 в данном случае будет определяться условием выравнивания между осевой силой, возникающей в сопряжении винтовой канавки 33 с радиальным штифтом 34, и силой сжатия пружины 30 с одной стороны и приводным крутящим моментом с моментом сопротивления, приведенных к текущему значению рабочего диаметра ведущего шкива 7, с другой стороны.
По мере изменения величины момента сопротивления на ходовых колесах 14 и 15 будет изменяться и величина приводного крутящего момента на валу 4 двигателя 3, что в свою очередь будет определять различное положение подвижной втулки 32 на первом промежуточном валу 5 за счет ее взаимодействия через винтовую канавку 33 с закрепленным на нем штифтом 34 с одной стороны, а с другой, через упорную вилку 35 с подвижным диском 27 и пружиной 30. В свою очередь различное положение подвижной втулки 32 на первом промежуточном валу 5 будет определяться через упорную вилку 35 и положение подвижного диска 27 и, следовательно, рабочий диаметр ведущего шкива 7. Это обеспечит через его взаимодействие с ведомым шкивом 17 при помощи приводного ремня 20 требуемые значения передаточного отношения клиноременного вариатора 10 и поступательной скорости мотоблока, соответствующих определенным режимам работы, характеризующимся конкретными значениями момента сопротивления на ходовых колесах 14 и 15.
По сравнению с известным решением предлагаемое позволяет расширить функциональные возможности мотоблока, повысить его производительность и снизить энергоемкость выполнения технологических операций за счет ручного или автоматического регулирования клиноременного вариатора, обеспечивающего бесступенчатое регулирование его поступательной скорости в зависимости от определенных условий работы и значений момента сопротивления на ходовых колесах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2009 |
|
RU2419269C2 |
| ПОЧВООБРАБАТЫВАЮЩАЯ ФРЕЗА | 2007 |
|
RU2353080C1 |
| Мотоблок с управляемым валом отбора мощности | 2024 |
|
RU2837400C1 |
| Шкив клиноременного вариатора | 1989 |
|
SU1763773A1 |
| КЛИНОРЕМЁННАЯ ВАРИАТОРНАЯ ПЕРЕДАЧА | 2022 |
|
RU2776330C1 |
| Бесступенчатая коробка передач с повышенным диапазоном передаточных отношений | 2019 |
|
RU2716396C1 |
| Клиноременный вариатор | 1989 |
|
SU1739143A1 |
| Устройство для регулирования натяжения рулонного материала | 1989 |
|
SU1620411A1 |
| Бесступенчатый привод транспортного средства | 2020 |
|
RU2737407C1 |
| БЕССТУПЕНЧАТЫЙ ПРИВОД АВТОМОБИЛЯ | 1995 |
|
RU2086430C1 |

Изобретение относится к области сельскохозяйственного машиностроения, в частности к средствам малой механизации с приводом от двигателя внутреннего сгорания или электродвигателя, и может быть использовано для выполнения различных технологических операций с навесным или прицепным оборудованием в приусадебных и фермерских хозяйствах, коммунально-хозяйственных службах. Мотоблок содержит раму с расположенными на ней рукоятками руля с органами управления, двигатель, включающий шкив отбора мощности и редуктор. На полуосях редуктора закреплены ходовые колеса. На входном валу редуктора закреплен ведомый шкив клиноременной передачи с механизмом сцепления в виде натяжного ролика приводного ремня, соединяющего ведомый шкив входного вала редуктора с ведущим шкивом клиноременной передачи, размещенным на втором промежуточном валу. Шкив отбора мощности жестко установлен на первом промежуточном валу. На втором промежуточном валу установлен ведомый шкив клиноременного вариатора, связанный вариаторным ремнем с ведущим шкивом клиноременного вариатора, установленным на первом промежуточном валу. Клиноременный вариатор содержит ведущий шкив с механизмами автоматического и ручного управления, установленными на центральной втулке первого промежуточного вала. Первый промежуточный вал жестко соединен с валом двигателя. Таким техническим решением обеспечивается расширение функциональных возможностей мотоблока, повышение его производительности и снижение энергоемкости выполняемой технологической операции. 4 з.п. ф-лы, 4 ил.
1. Мотоблок, включающий раму с расположенными на ней рукоятками руля с органами управления, двигатель, шкив отбора мощности, редуктор с закрепленными на его полуосях ходовыми колесами и закрепленным на его входном валу ведомым шкивом клиноременной передачи с механизмом сцепления в виде натяжного ролика приводного ремня, соединяющего ведомый шкив с ведущим, отличающийся тем, что он дополнительно снабжен клиноременным вариатором, состоящим из ведущего шкива с механизмами автоматического и ручного управления, установленными на первом промежуточном валу центральной втулки, жестко соединенном с валом двигателя, и ведомого шкива, закрепленного на втором промежуточном валу и кинематически связанного вариаторным ремнем с ведущим шкивом, при этом шкив отбора мощности жестко установлен на первом промежуточном валу, а ведущий шкив клиноременной передачи - на втором.
2. Мотоблок по п. 1, отличающийся тем, что ведущий шкив клиноременного вариатора содержит вращающуюся относительно первого промежуточного вала центральную втулку с установленными на ней неподвижным и подвижным дисками, с предохраняющими от осевого смещения опорными подшипниками.
3. Мотоблок по п. 1, отличающийся тем, что механизм автоматического управления клиноременным вариатором содержит установленные на первом промежуточном валу пружину, соприкасающуюся с одной стороны с закрепленным на первом промежуточном валу упорным стаканом, а с другой - с подвижным диском ведущего шкива, подвижную втулку с винтовой канавкой, соединенную с ним жестко закрепленным на нем радиальным штифтом, входящим в паз винтовой канавки, и упорную вилку, свободно установленную в осевых отверстиях неподвижного диска клиноременного вариатора и жестко закрепленную с одной стороны с его подвижным диском, а с другой - с подвижной втулкой.
4. Мотоблок по п. 1, отличающийся тем, что механизм ручного управления клиноременным вариатором содержит обойму с резьбовым хвостовиком, соединенную при помощи радиального подшипника с первым промежуточным валом, а резьбовым хвостовиком - жестко с рамой и подвижно с установленным на нем маховичком, взаимодействующим при помощи осевого подшипника с подвижной втулкой.
5. Мотоблок по п. 1, отличающийся тем, что ведомый шкив клиноременного вариатора содержит неподвижный и подвижный диски, пружину, установленные на втором промежуточном валу, при этом пружина закреплена упорным стаканом.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЗАО "Красный Октябрь - Нева", Санкт-Петербург, 2011, с.11 | |||
| CN 201054895 Y, 07.05.2008 | |||
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОДЪЕМНЫХ СОСУДОВ В СТВОЛЕ ШАХТЫ | 1995 |
|
RU2086496C1 |
| Дождевальный аппарат | 1980 |
|
SU912116A1 |
| УЗЛОВОЕ УСТРОЙСТВО И ПРОГРАММА | 2009 |
|
RU2457627C2 |
| US 3298239 A, 17.01.1967. | |||

