Изобретение относится к подъемно- транспортному оборудованию и может быть использовано в качестве приводной системы шаговых конвейеров или различного рода питателей-дозаторов, является усовершенствованием изобретения по авт.св. № 1239043.
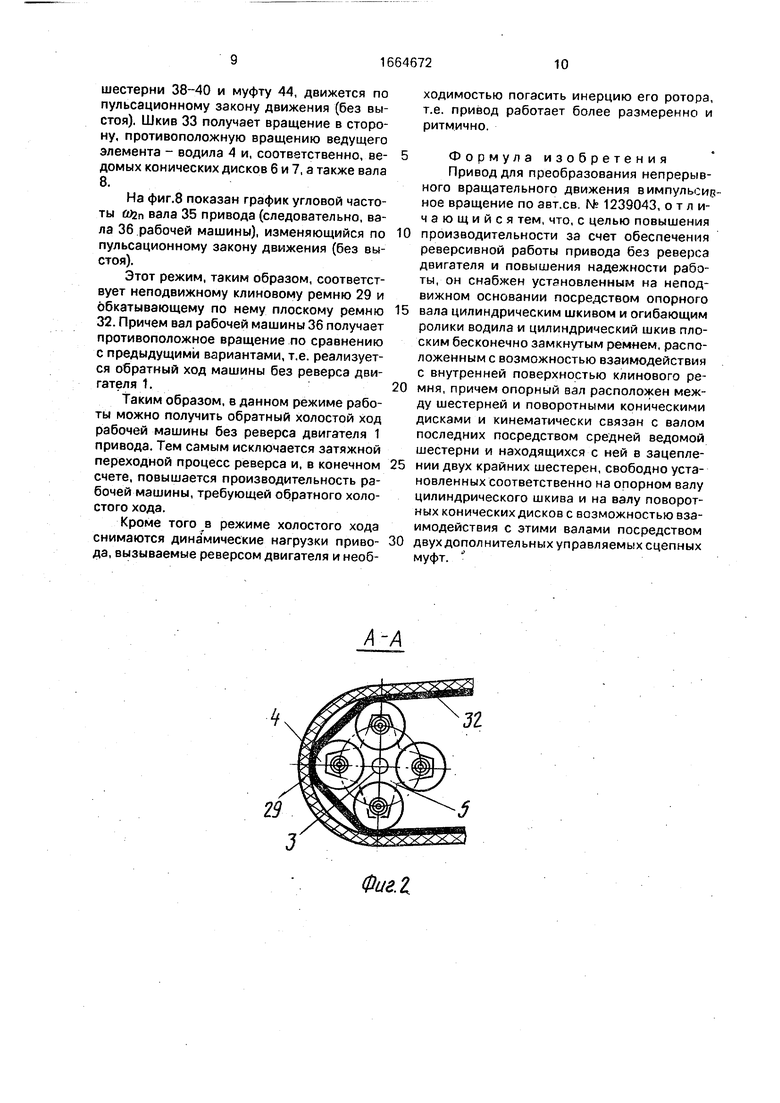
Целью изобретения является повышение производительности за счет обеспечения реверсивной работы привода без реверса двигателя и повышения надежности работы, На фиг.1 приведена конструктивная схема привода; на фиг.2 - разрез А-А на фиг.1 поясняющий устройство водила привода; на фиг.З - разрез Б-Б на фиг.1 (принципиальная схема волновой импульсной передачи); на фиг.4 - схема работы передачи в режиме реверса; на фиг.5 - диаграмма импульсного движения выходного вала по схеме импульс-выстой; на фмг.6 - диаграмма равномерного вращения выходного вала привода; на фиг.7 диаграмма импульсного движения выходного вала привода по схеме импульс вращения-вращение с постоянной частотой; на фиг.8-диаграмма движения выходного вала привода по схеме импульс вращения-нулевое значение угловой частоты вращения этого вала-импульс,
Привод (фиг.1 и 2) содержит приводной двигатель 1, соединенный постоянно замкнутой муфтой 2 с ведущим валом 3, на котором закреплено четырехроликовое водило 4 с четырьмя роликами 5, ведомый элемент в виде двух подпружиненных навстречу друг другу поворотных конических дисков 6 и 7, размещенных на выходном валу 8 и связанных с ним направляющими шпонками 9. Поворотные конические диски 6 и 7 подпружиненны в осевом направлении с помощью пружин 10. Привод содержит также механизм 11 регулирования импульсов, состоящий из двух конических дисков 12 и 13, размещенных симметрично и соосно относительно водила 4 с возможностью осевого перемещения. Диски 12 и 13 свободно установлены на ведущем валу 3, снабжены зубчатыми венцами 14 и 15, которыми связаны с этим валом многозвенной зубчатой передачей 16. Эта передача состоит из зубчатого колеса 17, закрепленного на валу 3, зубчатого колеса 18, закрепленного на выходном валу 19 этой передачи, и полой шестерни 20, свободно установленной на валу 19. Шестерня 20 снабжена трубчатыми опорными цапфами 21 и 22, размещенными в неподвижных опорах 23 и 24. На цапфе 22 установлена подвижная полумуфта 25 управляемой сцепной, например, кулачковой муфты 26. В состав этой муфты входит полумуфта 27, закрепленная на опоре 24, и полумуфта 28, закрепленная на валу 19, для сцепления вала с шестерней или с неподвижным основанием.
Шестерня 20 входит в зацепление с зуб- чатыми венцами 14 и 15 конических дисков
12и 13.
Поворотные конические диски 6 и 7, а также фиксирующие конические диски 12 и
13вместе с роликами 5 водила 4 объедине- 0 ны клиновым ремнем 29, огибающим поворотные конические диски 6 и 7 и фиксирующие конические диски 12 и 13, которые всегда находятся в поджатом состоянии. Диски 12 и 13 связаны устройством 30
5 для их осевого перемещения. Управляемая сцепная муфта 26 также снабжена механизмом 31 управления ею.
Привод снабжен плоским бесконечным ремнем 32, ведомым цилиндрическим шки0 вом 33 с ребордами 34. Плоский ремень 32 огибает ролики 5 водила 4 и цилиндрический шкив 33 и расположен с возможностью взаимодействия с внутренней поверхностью клинового ремня 29.
5Водило 4, клиновый ремень 29 и две
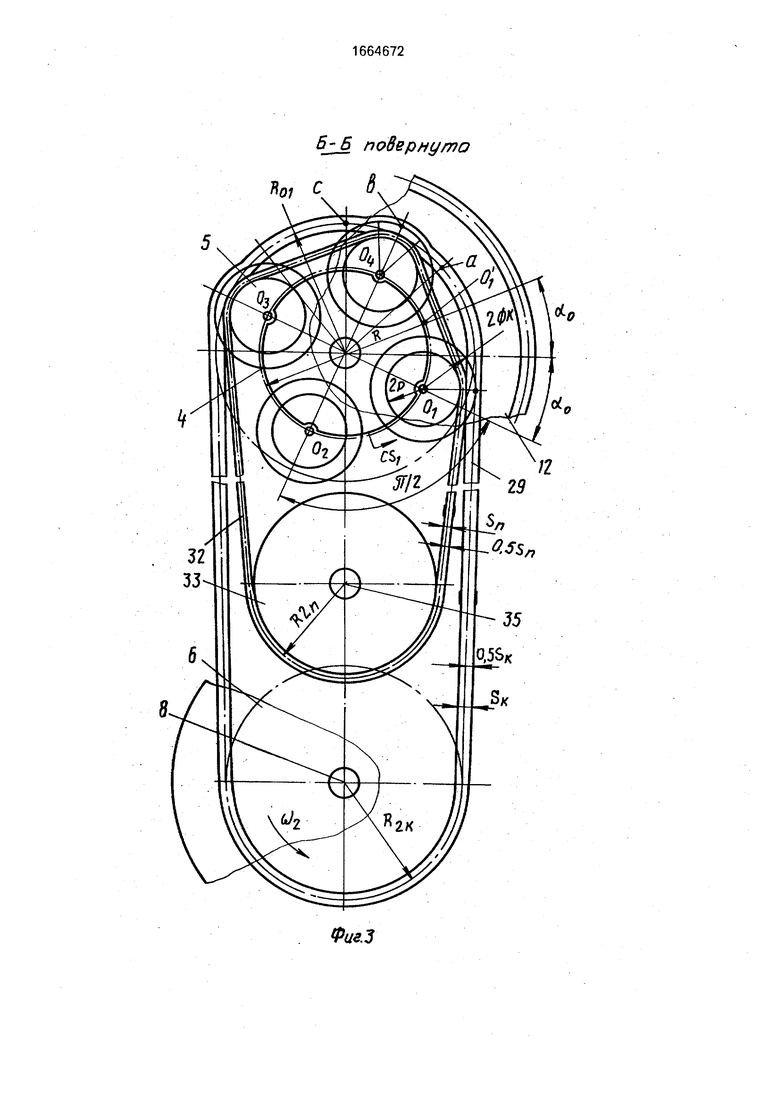
пары конических дисков 12, 13 и 6, 7 представляют собой волновую импульсную передачу с внешним обкатыванием ремня по дискам. Особенностью передачи является
0 попутное вращение ведущего (водила 4) и ведомого (диск 6 и 7) звеньев соответственно с угловыми частотами ац и ад (фиг.З).
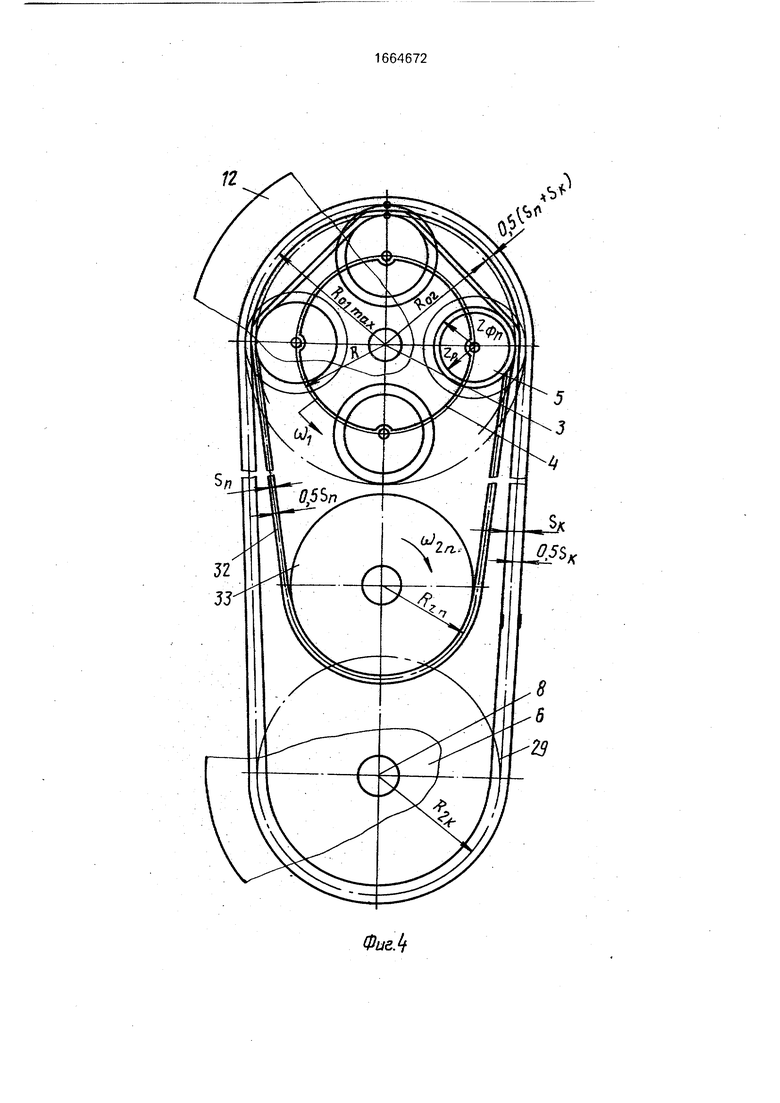
Водило 4, плоский ремень 32 и цилинд5 рический шкив 33 представляют собой волновую импульсную передачу с внутренним обкатыванием ремня 32 по ремню 29, как по направляющему ободу. Особенностью той передачи является встречное вращение ве0 дущего (водило 4) и ведомого (шкив 33) элементов соответственно с угловыми частотами и адп.
Цилиндрический шкив 33 установлен на неподвижном основании на опорном валу
5 35, расположенном между шестерней 20 и поворотными коническими дисками 6 и связанном с выходным валом 8 ведомых элементов 6 и 7 и валом 36 рабочей машины посредством трехзвенной зубчатой переда0 чи 37, состоящей из одной крайней шестерни 38, свободно установленной на валу 35 и соединяемой с ним посредством одной дополнительной управляемой сцепной муфты 39, средней ведомой шестерни 40, жестко
5 закрепленной на выходном валу 41 привода и другой крайней шестерни 42, свободно установленной на валу 8 и соединяемой с ним посредством другой дополнительной управляемой сцепной муфты 43.
Выходной вал 41 привода связан с валом 36 рабочей машины постоянно замкнутой муфтой 44. Муфты 39 и 43 управляются механизмами соответственно 45 и 46. Привод смонтирован на неподвижном основа- нии 47.
Центры роликов 5 водила 4 находятся на окружности радиуса R. Ролики имеют фактический радиус ГР- Для кинематических расчетов волновой передачи с клиновым ре- мнем используется фиктивный радиус, который находится из выражения
гфк гр + Sn + 0,5 SK,(1)
где Гр - фактический радиус ролика 5;
Sn - толщина плоского ремня;
SK - толщина клинового ремня.
Соответственно, для этой передачи имеет значение расчетный радиус обката ROI дисков 12 и 13, который определяется окружностью касания этих дисков и клино- вого ремня по нейтральной линии, соответствующей центру тяжести клинового ремня (фиг.З).
Графически величина ROI при заданном осевом положении дисков 12 и 13 находится следующим образом, Проводится поперечная ось симметрии поперечного сечения клинового ремня ЦК (фиг.1). Затем из точки К, лежащей на боковой поверхности ремня, проводится прямая, перпендикулярная оси вращения дисков 12 и 13, до пересечения с образующими соответствующего конического диска 13, что и дает величину двойного радиуса 2 ROI.
Расчетный радиус дисков 6 и 7 - Я2к (фиг.З). Передаточное число зубчатой передачи 16 - Uie 1.
Для кинематических расчетов волновой передачи с плоским ремнем используется фиктивный радиус роликов
гфп гр + 0,5 Sn.(2)
Расчетным радиусом обката для передачи с плоским ремнем является радиус Ro2 (фиг.4). который находится из выражения
R02 R + гр + 0,5 Sn;
R02 R 01 max - (Sn + SK).(3)
где ROI max- максимальное значение радиуса ROI.
Расчетным радиусом цилиндрического диска 33 является радиус Ran.
Привод работает следующим образом.
Возможны четыре варианта работы привода.
Вариант I. Преобразование непрерывного вращательного движения двигателя в шаговое вращение выходного вала (с остановками). Управляемая сцепная муфта 26 обеспечивает стопорение фиксирующих конических дисков 12 и 13, полумуфта 25 сцеплена с полумуфтой 27, закрепленной на
опоре 24 корпуса, тем самым стопорятся цапфа 22 полой шестерни 20 и диски 12 и 13, Муфта 39 разомкнута и шестерня 38 не получает вращение от вала 35 цилиндрического шкива 33, муфта 43 замкнута и шестерня 42 соединена с валом 8 конических дисков 6 и 7. При вращении электродвигателя, например, против часовой стрелки ведущий вал привода и водило 4 (с рабочими роликами 5) тоже вращаются против часовой стрелки с угловой скоростью ом.
Вал с полумуфтой 28 вращаются вхолостую. Ролики 5 водила 4 обеспечивают волнообразные перекатывания клинового ремня 29 по неподвижным фиксирующим коническим дискам 12 и 13.
После входа верхнего ролика 5 с центром вращения От в контакт с клиновым ремнем 29 и поворота водила 4 на угол 2 оь образуется в зоне точки O i гофр, аналогичный гофру abc. При этом гофр в зоне точки Оз исчезает, что связано с вращением поворотных конических дисков 6 и 7, вала 8, шестерни 42, шестерни 40 с валом 41, от которого через муфту 44 получает вращение вал 36 рабочей машины, на заданный угол. Во время поворота водила на угол р- -л/Ч - 2ао эти ведомые элементы находятся в состоянии покоя. При дальнейшем вращении водила цикл деформирования клинового ремня повторяется. Таким образом обеспечивается шаговое движение с остановками вала рабочей машины (фиг.5).
Среднее значение передаточного числа от водила 4 к выходному валу 8 находится из очевидного уравнения
2Л Р2к Л Р2кп
ифк ТКъ олс w
4AS 2Д5 где Д S abc - ас (фиг.З).
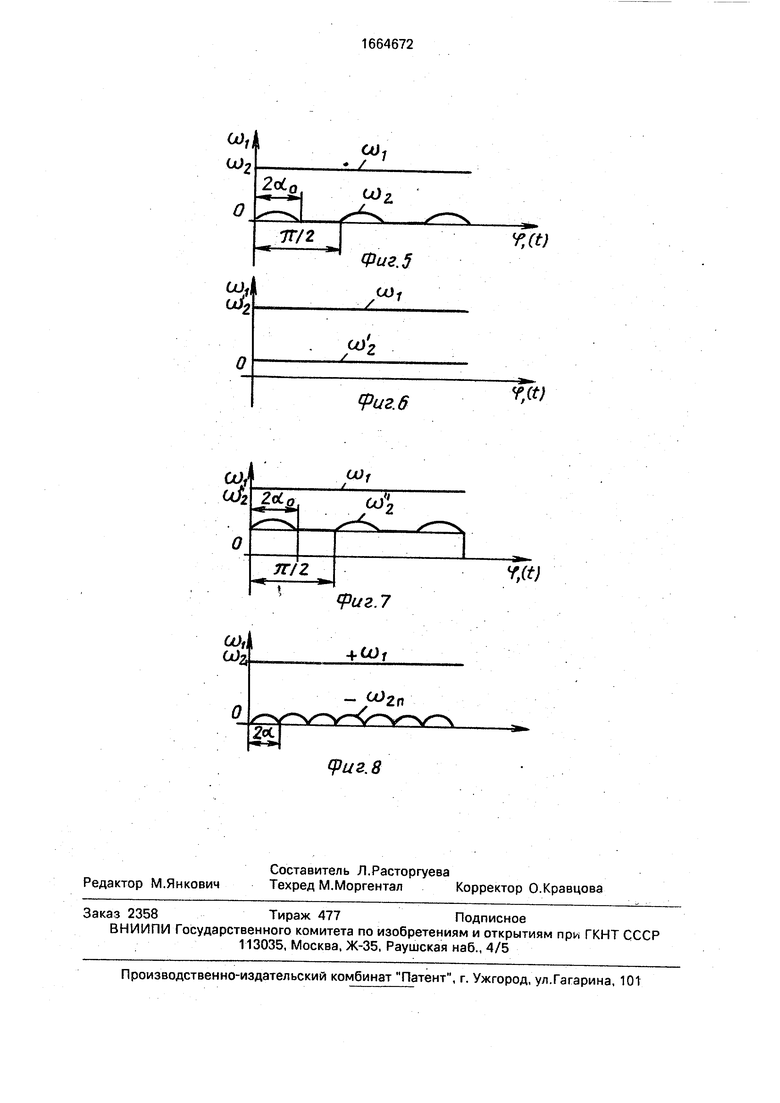
Диаграмма импульскиногодвижения выходного вала привода по схеме импульс вращения - выстой приведена на фиг.5. Здесь, как и на других подобных диаграммах (фиг. 5-8) прямой линией, параллельной оси абсцисс, изображен график угловой частоты Wi ведущего вала 3 привода (wi const) в функции угла поворота этого вала pi (г). На ось абсцисс (фиг.5) наложен график угловой частоты аъ вращения вала 8 привода (соответственно рабочего вала 36 машины) в виде симметричных кривых, определяющих импульс вращения в пределах угла вращения вала 3, равного 2 «ъ,а также паузу между двумя соседними кривыми (импульсами), когда угловая частота 0 (выстой). Продолжительность паузы соответствует углу вращения ведущего вала л/2 - 2оъ.
Значение ифк из выражения (4) можно регулировать в широких пределах за счет
изменения величины A S осевым перемещением дисков 12 и 13с помощью устройства 30 управления положением дисков. Одновременно с клиновым ремнем 29 роликами водила деформируется и определенным образом перемещается и плоский ремень 32, а также цилиндрический шкиз 33, однако это влияние на движение вала 36 рабочей машины не оказывает, благодаря выключенной муфте 39. Таким образом, в первом варианте рассматриваемое устройство работает как бесступенчатый вариатор с регулированием скорости выходного вала на ходу машины.
Вариант 2. Преобразование непрерывного вращательного движения ведущего вала в непрерывное вращение выходного вала с большой (маневровой) скоростью. При этом полумуфта 25 сцеплена с полумуфтой 28. Остальные муфты находятся в положении первого варианта. С помощью устройства 30 устанавливается такое положение дисков 12 и 13, что A S 0. При этом величина радиуса обката ROI достигает максимального значения (Roi Poi max). В зоне соприкосновения с коническими дисками 12 и 13 клиновой ремень 29 принимает форму круга. Ролики 5 не вызывают поперечной деформации ремня 29 и передача диски 12 и 13 - ремень 29 - диски 6 и 7 работает как обычная быстроходная клиноременная передача с передаточным отношением
1 i - 2к(г-
ил -5.(5)
чИтах
На фиг.6 прямой, параллельной оси абсцисс и обозначенной &4 показан график угловой частоты вала 8 (соответственно вала рабочей 36 машины) при вращении фиксирующих дисков 12 и 13 и отсутствии деформирования клинового ремня 29 роликами 5
водила 4. При этом u}J const.
Вариант 3. Преобразование непрерывного вращательного движения в импульсивное, но без остановок (угловая скорость больше нуля) вращение вала рабочей машины.
Условия работы такие же, как и по второму варианту, но с помощью устройства 30 устанавливается такое положение дисков 12 и 13, когда AS 0, т.е. AS 0. Диски 6 и 7 участвуют в переносном и Относительном-движениях (воашениях). Вал рабочей машины получает импульсивное, но без остановок движение (вращение), когда угловая частота ведомого вала между импульсами не равна нулю.
На фиг.7 показан график угловой частоты вращения цЈ ведомого вала 8 привода
(соответственно вала 36 рабочей машины) комбинированной линией, состоящей из симметричных участков кривой, соединенной отрезками, параллельными оси абсцисс. Криволинейные участки графика соответствуют импульсам движения (угол - 2ао) выходного вала 8, а прямолиней- / ные участки соответствуют равномерному вращению вала 8. Зтот график соответству0 ет вращающимся фиксирующим дискам 12 и 13 и одновременно поперечному деформированию ремня 29 роликами 5 водила 4. Вариант 4. Дополнение авт.св. № 1239043 предлагаемым устройством.
5 В этом случае, как в первом варианте, сцепная муфта 26 обеспечивает стопорение фиксирующих конических дисков 12 и 13: полумуфта 25 сцеплена с полумуфтой 27, закрепленной на опоре 24 корпуса, и тем
0 самым стопорятся цапфа 22 полой шестерни 20 и сами диски 12 и 13, вал 19с полумуфтой 28 вращается в холостую. В отличие от первого в четвертом варианте муфта 43 разомкнута, а муфта 39 замкнута.
5 Кроме того, как и во втором варианте, с помощью устройства 30 установлено такое положение дисков 12 и 13, что A S 0. В соприкосновении с этими дисками клино- вый ремень 29 (его нейтральная линия) за0 нимает положение дуги правильной окружности радиусом Roi max (фиг.4). Тем, что клиновый ремень 29 прижат к дискам 12 и 13 и к роликам 5 водила 4 обеспечивается фрикционный контакт роликов 4, клинового
5 ремня 29 и плоского ремня 32 (фиг.4). Таким образом, компонуется волновая импульсная передача. Роль шкива обката (жесткое колесо) играет к иновый ремень.
Вращениэ водила 4 против часовой
0 стрелки с угловой частотой у1 вызывает уп- . русую деформацию плоского ремня роликами 5 и импульсное вращение цилиндрического шкива 33 по часовой стрелке (фиг.4).
5 Среднее значение передаточного числа волновой плоскоременной передачи с внут- ренним обкатыванием гибкого звена находится из выражения
к ,сч
0 иФп R . (а - sin a) (б)
где R - радиус окружности водила 4 по центрам роликов 5 (фиг.З);
а- угол поворота водила 4, определяемый отношением
5.. л
,
(7)
где Z - число роликов 5 в водиле 4.
Вал 36 рабочей машины, получая вращение от цилиндрического шкива 33 через
шестерни 38-40 и муфту 44, движется по пульсационному закону движения (без вы- стоя). Шкив 33 получает вращение в сторону, противоположную вращению ведущего элемента - водила 4 и, соответственно, ве- домых конических дисков б и 7, а также вала 8.
На фиг.8 показан график угловой частоты ftfcn вала 35 привода (следовательно, вала 36 рабочей машины), изменяющийся по пульсационному закону движения (без вы- стоя).
Этот режим, таким образом, соответствует неподвижному клиновому ремню 29 и обкатывающему по нему плоскому ремню 32. Причем вал рабочей машины 36 получает противоположное вращение по сравнению с предыдущими вариантами, т.е. реализуется обратный ход машины без реверса двигателя t.
Таким образом, в данном режиме работы можно получить обратный холостой ход рабочей машины без реверса двигателя 1 привода. Тем самым исключается затяжной переходной процесс реверса и, в конечном счете, повышается производительность рабочей машины, требующей обратного холостого хода.
Кроме того в режиме холостого хода снимаются дина мические нагрузки приво- да, вызываемые реверсом двигателя и необходимостью погасить инерцию его ротора, т.е. привод работает более размеренно и ритмично.
Фоомула изобретения Привод для преобразования непрерывного вращательного движения в импульсиное вращение по авт.св. № 1239043, отличающийся тем, что, с целью повышения производительности за счет обеспечения реверсивной работы привода без реверса двигателя и повышения надежности работы, он снабжен установленным на неподвижном основании посредством опорного вала цилиндрическим шкивом и огибающим ролики водила и цилиндрический шкив плоским бесконечно замкнутым ремнем, расположенным с возможностью взаимодействия с внутренней поверхностью клинового ремня, причем опорный вал расположен между шестерней и поворотными коническими дисками и кинематически связан с валом последних посредством средней ведомой шестерни и находящихся с ней в зацеплении двух крайних шестерен, свободно установленных соответственно на опорном валу цилиндрического шкива и на валу поворотных конических дисков с возможностью взаимодействия с этими валами посредством двух дополнительных управляемых сцепных муфт.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1984 |
|
SU1239043A1 |
| Привод шпинделя для вибрационного резания | 1980 |
|
SU933293A1 |
| Привод подъемника | 1981 |
|
SU992379A1 |
| Бесступенчатая силовая передача для транспортных средств | 1989 |
|
SU1733279A1 |
| Волновой вариатор скорости для привода двухвалковой дробилки | 1980 |
|
SU933108A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ УЗЛА САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ, СОДЕРЖАЩЕГО НАВЕСНОЙ РЕЖУЩИЙ АППАРАТ И/ИЛИ НАКЛОННЫЙ ПИТАТЕЛЬ | 2012 |
|
RU2588444C2 |
| Вариатор для трансмиссии легкого или сверхлегкого летательного аппарата вертолетного типа (варианты) | 2023 |
|
RU2819953C1 |
| Трансмиссия легкого или сверхлегкого летательного аппарата вертолетного типа (варианты) | 2023 |
|
RU2819224C1 |
| Шагающая опора транспортного средства | 1980 |
|
SU933533A1 |
| Сновальная машина | 1990 |
|
SU1796705A1 |
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано в качестве приводной системы шаговых конвейеров или различного рода питателей-дозаторов. Цель - повышение производительности за счет обеспечения реверсивной работы привода без реверса двигателя и повышения надежности работы. Привод содержит двигатель 1, соединенный постоянно замкнутой муфтой 2 с ведущим валом 3, на котором закреплено четырехроликовое водило 4 с роликами 5 и ведомый элемент в виде подпружиненных конических дисков (КД) 6, 7. Привод имеет также механизм 11 регулирования импульсов, состоящий из двух КД 12, 13. Поворотные КД 6, 7 и фиксирующие КД 12, 13 вместе с роликами 5 водила 4 объединены клиновым ремнем. Бесконечно-замкнутый ремень очищает ролики 5 водила 4 и цилиндрический шкив 33 и расположен с возможностью взаимодействия с внутренней поверхностью клинового ремня. Шестерня (Ш) 20 входит в зацепление с зубчатыми венцами 14 и 15 КД 12, 13. Цилиндрический шкив 33 установлен на неподвижном основании на опорном валу 35, расположенным между Ш 20 и поворотными КД 6, связанном с выходным валом 8 ведомых элементов и валом 36 посредством трехзвенной зубчатой передачи 37, состоящей из одной крайней Ш 38, свободно установленной на валу 35 и соединяемой с ним управляемой сцепной муфтой 39 и Ш 42. Вал рабочей машины получает противоположное вращение, т.е. реализуется обратный ход машины без реверса двигателя 1. 8 ил.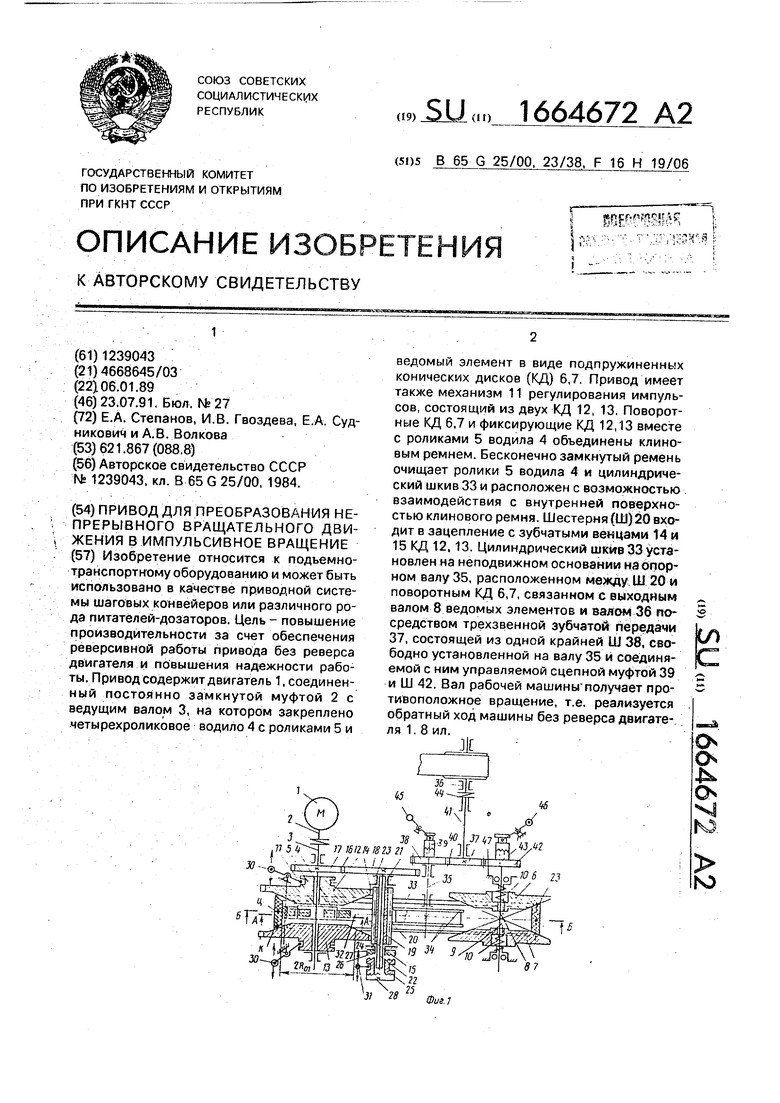
Фиг.1
.Ј повернуто 01 С 8.
0(/«J
лЬ
л
й
М
ФигМ
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1984 |
|
SU1239043A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
