(5+) СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ЗВЕНЬЕВ МЕХАНИЗМА В ПОТЕНЦИАЛЬНУЮ И НАОБОРОТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
I
Изобретение относится к машиностроению, а именно к инерционным приводам прессов обработки металлов давле нием и может быть использовано в качестве привода различных машин, в которых требуются кратковременные усилия значительныхвеличин.
Известен способ преобразования кинетической энергии звеньев механизма в потенциальную и наоборот,заключающийся в том, что ведущее звенр механизма подключают к маховику инерционного аккумулятора энергии и вращают маховик вокруг его собственной оси, после чего аккумулятор подключают к ведомому звену l ,Разгон маховика осуществляют только в одном направлении - вокруг собственной оси вращения.
Этот способ реализован, например, с помощью устройства для преобразования кинетической энергии звеньев механизма в потенциальную и наоборот.
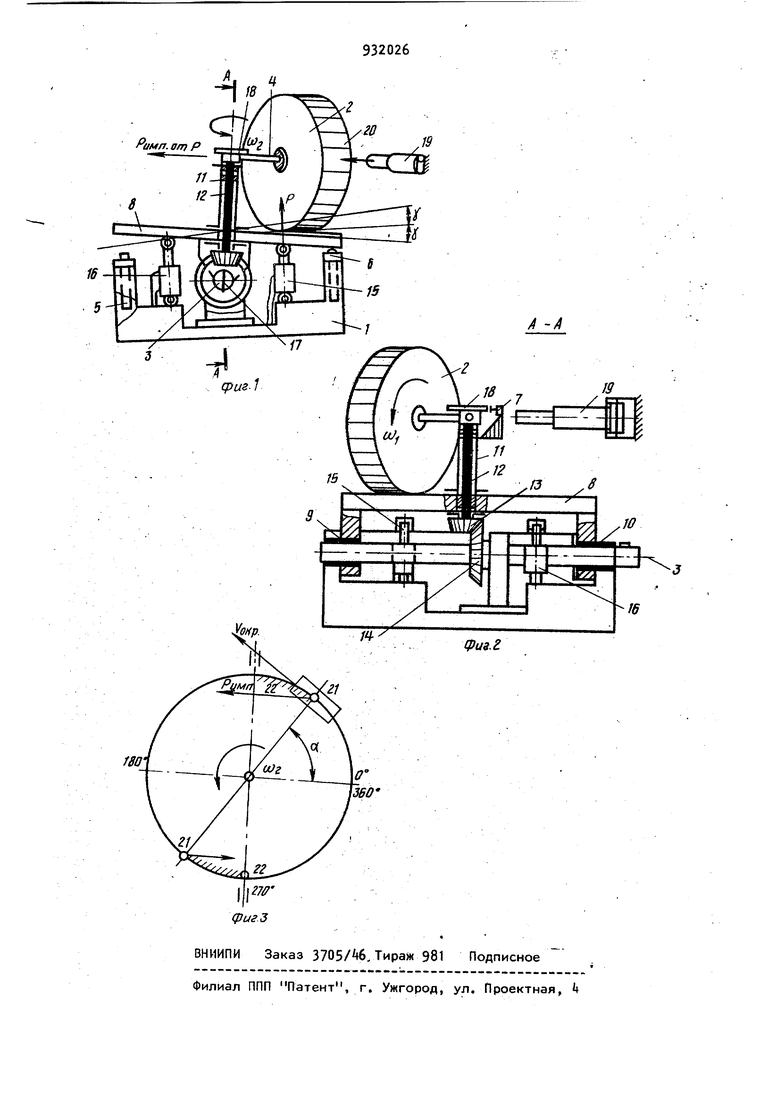
содержащего основание, размещенный .на нем маховик, разгонный привод маховика и выходной вал, это устройство содержит также инерционный вариатор, включающий обойму с внутренней профилированной поверхностью, втулку и установленные на втулке на осях с возможностью вращения рычаги с роликами, взаимодействующие с внутренней профилированной поверхностью обоймы, в рычагах по их длине выполнены прорези, в которых размещены оси,привод снабжен тремя обгонными муфтами, две из которых, соединяющие вал разгонного двигателя и вал маховика с втулкЬй вариатора, установлены с возможностью передачи вращения в одном направлении, а третья,соединяющая обойму вариатора с валом маховика, установлена с возможностью передачи вращения в направлении, противоположном направлению вращения, передаваемому первыми двумя муфтами, при этом вариатор снабжен блокиоовочной муфтой включения, соединяющей обойму и втулку вариатора 2j. Недостатком известных способа и устройства, является то, что они обе печивают низкие энергоемкость и КПД. Это обусловлено тем, что разгон маховика осуществляют только в одном направлении - вокруг собственной оси вращения, а также тем, что для реализации этого способа в устройствах с целью повышения энергоемкости необходимы высокие скорости вращения сложное оборудование с большим количеством кинематических пар и поверхностей трения, что, в свою очередь, снижает КПД устройства. , Цель изобретения - повышение энер гоемкосТи и КПД. Предлагаемое изобретение направлено на создание способа преобразова ния кинетической энергии звеньев механизма в потенциальную и наоборот,а также устройства для его осуществления, последовательность операций и конструкция которых соответственно обеспечивали бы повышение энергоемкости и КПД. Поставленная цель достигается тем что в способе преобразования кинети ческой энергии звеньев механизма в потенциальную и наоборот, заключающемся в том, что ведущее звено механизма подключают к маховику инерцион ного аккумулятора энергии и вращают маховик вокруг его собственной оси, после чего аккумулятор подключают к ведомому звену, маховику сообщают дополнительное вращение относительно вертикальной оси ведущим звеном и синхронизируют оба вращения маховика посредством опорной поверхности. При этом оба вращения осуществляют наклоном опорной поверхности и последую щим сообщением маховику горизонтального импульса переносного движения,а наклон на положительный угол опорной поверхности с маховиком и сообщение ему горизонтального импульса произво дят во время вращения периодически дважды за один оборот маховика вокруг вертикальной оси. В устройстве .для преобразования кинетической энергии звеньев механиз ма в потенциальную и наоборот, содер жащем основание, размещенный на нем маховик, разгонный привод маховика и выходной вал, маховик выполнен в виде диска, свободно посаженного на конце балки, устройство снабжено установленными на основании регулируемыми упорами-ограничителями, путевым переключателем привода, кольцевой платформой, установленной на основаНИИ с возможностью качания относительно него посредством цилиндрических шарниров и взаимодействующей с упорами-ограничителями, размещенным в центре ее и жестко с ней связанным полым корпусом, вертикальным валом, установленным в полом корпусе с возможностью вращения и жестко связанным одним концом с балкой, а вторым кинетически связанным с выходным валом, разгонный привод выполнен в виде двух силовых цилиндров, смонтированных на основании и размещенных с двух сторон от оси качания платформы и взаимодействующих с ней, на вертикальном валу жестко установлен элемент с двумя диаметрально расположенными приливами, периодически взаимодействующими с путевым переключателем привода. Кроме того, разгонный привод может быть снабжен дополнительным откидывающимся толкателем, взаимодействующим с опорной поверхностью маховика-, а упоры-ограничители установлены с врзможностью одновременного выдвижения в направлении платформы. При этом маховик установлен на балке с возможностью фиксации и поступательного перемещения вдоль оси вертикального вала с последующим стопорением. На фиг. 1 изображено устройство для осуществления способа; на фиг.2 разрез А-А на фиг. 1; на фиг. 3 схема действия разгонного импульса на маховик. Устройство содержит основание 1, размещенный на нем махойик 2, разгонный привод маховика 2 и выходной вал 3 Маховик 2 выполнен в виде диска, свободно посаженного на конце балки k. Устройство снабжено установленными на основании 1 регулируемыми упорами-ограничителями 5 и 6, путевым переключателем 7 привода, кольцевой платформой 8, установленной на основании 1 с возможностью качания относительно него посредством цилиндрических шарниров 9 и 10 и взаимодействующей с упорами-ограничителями 5 и 6. Устройство снабжено также размещенным в центре кольцевой платформы 8 и жестко с ней связанным полым корпусом 11, вертикальным валом 12, установленным в полом корпусе 1 1 с возможностью вращения и жестко связанным одним концом с балкой Ц, а вторым - кинематически связанным, например, посредством зубчатой передачи - пары конических колес 13 и 14, с выходным валом 3-Разгонный привод выполнен в виде двух силовых цилиндров 15 и 6, смонтированных на основании 1 и размещенных с двух сторон от оси 17 качания плат формы 8 и взаимодействующих с ней. На вертикальном валу 12 жестко установлен элемент 18 с двумя диаметраль но расположенными приливами (не показаны), периодически взаимодействую щими с путевым выключателем 7 привода. Последний снабжен дополнительным откидывающимся толкателем 19 взаимодействующим с опорной поверхностью 20 маховика 2, а упоры-ограни чители 5 и 6 установлены с возможностью одновременного выдвижения в . направлении- платформы 8. Маховик 2 установлен на блоке с возможностью фиксации, например, с помощью электромагнитного фиксатора (не показан) и поступательного перемещения вдоль оси вертикального вала с последующим стопорением (средства для перемещения маховика 2 с балкой k и стопор не показаны). Устройство работает следующим образом. В исходном положении (фиг. 1) платформа 8 наклонена на отрицательный угол Jf и опирается на упор-ограничитель 6, а маховик 2 находится в самой низкой точке (угол oi- Q ) Затем приводят в действие привод ма ховика 2, Силовой цилиндр 15 поднима ет край платформы В с маховиком 2, а шток силового цилиндра 16-опускают и включают пусковой толкатель 19 ко торый сдвигает маховик 2 с мертвой точки и сообщает ему импульс в сторо ну вращения. Маховик 2 скатывается с наклонной опорной поверхности платформы 8 и под действием сил инер ции, пройдя новую нижнюю точку., расп ложенную на отметке IBO (фиг. 3)под нимается по опорной поверхности плат формы 8 до точки 21 сектора № 2. В этой точке элемент 18 через переключатель 7 включает в режим подъема платформы 8 силовой цилиндр 16, находящийся в данный момент под махови ком 2, а силовой цилиндр 15 в режим опускания платформы 8, и платфор ма 8 меняет знак наклона и поднимает маховик 2. 3 это же время при движении маховика 2 от точки 21 до точки 22 сектора № 2 он получает горизонтальный импульс, так как скорость вращения маховика 2 вокруг вертикальной оси меньше, скорости изменения угла наклона платформы 8. Маховик 2 складывается е наклонной опорной поверхности платформы 8. При этом откидывается на шарнире (не обозначен) пусковой толкатель 13, и цикл с ускорением вращения маховика повторяется. При достижении маховиком 2 расчетной скорости, т.е. когда время прохождения маховика 2 от точки21 до точки 22 любого из секторов № 1 и Н° 2 становится равным времени импульса устройство входит в стационарный режим. Так как скорости перемещения маховика 2 и импульса, передаваемого ему от платформы 8, сравнялись, то маховик 2 уже не получает разгонного импульса, и энергия цилиндров 15 и 16 тратится только на изменение наклона платформы 8 и подъем маховика 2 без разгона последнего. Перед подключением устройства к ведомому звену 3 например к прессу, упоры-ограничители 5 и 6 одновременно выдвигаются вверх, и платформа 8 выставляется в горизонтальное положение, затем подключается ведомый вал 3, и накопленная энергия от маховика 2 передается на него. Для использования устройства в качестве простого преобразователя последовательных возвратно-поступательных движений штоков силовых цилиндров 15 и 16 во вращательное непрерывное цвижение выходного вала маховик 2 фиксируется на балке k с помощью,например, электромагнитного фиксатора (не показан, перемещается на вертикальном валу 12 в направлении от. платформы 8 и стопорится в этом положении стопором любой известной конструкции (не показан). При поочередной работе силовых цилиндров 15 и 16 производится периодический наклон платформы 8,- корпуса 11, вертикального вала 12, балки k и жестко связанного с ней маховика 2. Так как маховик 2 расположен на некотором плече, равном дли1не балки , а пере:численные элементы конструкций расположены под некоторым углом от вертикали,под дей ;твием силы тяжести создается крутящий момент, который передается через пару шестерен 13 и Н на ведомый ал Маховик 2 может быть выполнен в видежелезобетонной конструкции с целью снижения себестоимости приводо для мощных пр.ессов. Использование предлагаемых способа и устройства для его осуществления обеспечивает повышение КПД и энергоемкости системы при сравнитель но небольшом числе оборотов за счет вращения маховика вокруг собственной и вертикальной осей вращения. Формула изoбpeteния 1.Способ преобразования кинетической энергии звеньев механизма в потенциальную и наоборот, заключающийся в том, что ведущее звено механизма подключают к маховику инерцион ного аккумулятора энергии и вращают маховик вокруг его собственной оси, после чего аккумулятор подключают к ведомому звену, отличающийс я тем, что, с целью повышения энергоемкости и КПД, маховику сообща ют дополнительное вращение относительно вертикальной оси ведущим звеном и синхронизируют оба вращения маховика посредством опорной поверхности. 2.Способ по п. 1.отличающийся тем, что оба вращения осуществляют наклоном опорной поверхности и последующим сообщением маховику горизонтального импульса переносного движения, а наклон на положительный угол опорной поверхности с маховиком и сообщение ему горизонтального импульса производят во время вращения периодически - дважды за один оборот маховика вокруг вертикадьной оси. 3. Устройство для преобразования :кинетической энергии звеньев механиз,Мв в потенциальную и наоборот, содержащее основание , размещенный на нем маховик, разгонный привод махови.ка и выходной вал, отличают щ е е с я тем, что маховик выполнен в виде диска, свободно посаженного на конце балки, устройство снабжено установленными на основании регулируемыми упорами-ограничителями, путевым переключателем привода, кольцевой платформой, установленной на основании с возможностью качания относительно него посредством цилиндрических шарниров и взаимодействующей с упорами-ограничителями, размещенным в центре ее и жестко с ней связанным полым корпусом, вертикальным валом, установленным в полом корпусе с возможностью вращения и жестко связанным одним концом с балкой, а вторым - Кинетически iсвязанным с выходным валом, разгонный привод выполнен в виде двух силовых цилиндров, смонтированных на основании и размещенных с двух сторон от оси качания платформы и .взаимодействующих с ней, на вертикальном валу жестко установлен элемент с двумя диаметрально расположенными приливами, периодически взаимодействующими с путевым переключателем привода. . Устройство поп. 3 отличающе ее я тем, что разгонныйпривод снабжен дополнительным откидывающимся толкателем, взаимодействующим с опорной поверхностью маховика, а упоры-ограничители установлены с возможностью одновременного выдвижения в направлении платформы. 5. Устройство по п. 3. отличающееся тем, что маховик установлен на балке с возможностью фиксации и поступательного перемещения вдоль оси вертикального вала с последующим стопорением. ч Источники информации. Принятые во внимание при экспертизе 1.Гулиа Н.В. Инерционные аккумуляторы энергии. Изд. Воронежского университета, Воронеж, 1973. с. SS (прототип). 2.Авторское свидетельство СССР № 605051, кл. F 16 Н 33/02, 1976 (прототип).