(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ШПИНДЕЛЯ БАЛАНСИРОВОЧНСГО СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вращением шпинделя балансировочного станка | 1981 |
|
SU998887A2 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Устройство для управления вращениемшпиНдЕля бАлАНСиРОВОчНОгО CTAHKA | 1979 |
|
SU847104A1 |
| Устройство для измерений дисбаланса роторов | 1981 |
|
SU1017937A1 |
| Устройство для автоматического измерения дисбаланса изделий | 1975 |
|
SU589547A1 |
| Балансировочный станок | 1983 |
|
SU1155886A1 |
| Измерительное устройство к балансировочному станку | 1971 |
|
SU503155A1 |
| Измерительное устройство к балансировочному станку для уравновешивания роторов | 1980 |
|
SU932328A2 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1173213A1 |
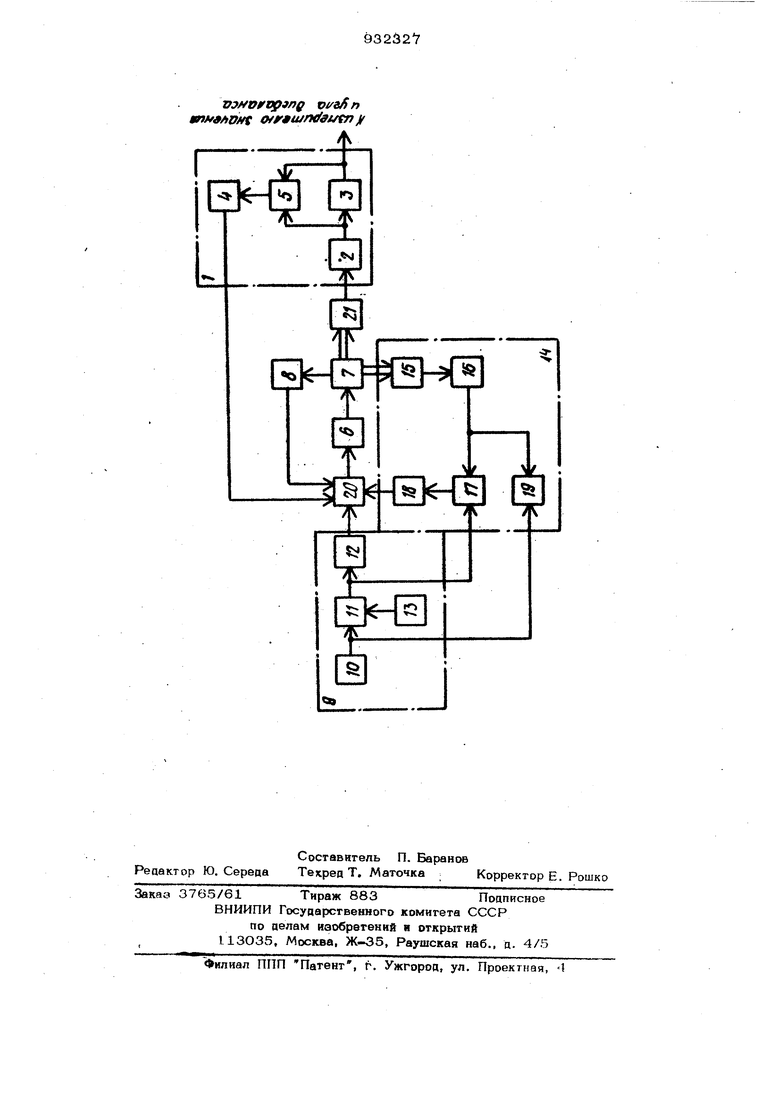
Изобретение относится к измеритель- ной технике и может быть использовано в балансировочных станкак для управлени частотой брашения гибки роторов. Известно устройство для управленийвращением шпинделя балансировочного станка, содержащее канал выделения сиг нала дисбаланса, задающий генератор час тоты вращения, схему сравнения зацанно и фактической частоты вращения, один из входов которой соединен с задающим генератором, а второй - с каналом выде ления сигнала - дисбалансаи привод, соед ненный с выходом схемы сравнения 1,1 J. Недостатком этого устройства является низкая точность поддержания частоты вращения ротора и, как следствие, фазо- частотные погрещности при измерении дисбалансов. Наиболее близким к предлагаемому является устройство для управления вращением щпинделя балансировочного станка, содержащее цепь фазовой автопод- стройки частоты, выполненную в вице датчика дисбаланса, связанного с ним резонансного фильтра, усилителя и фазометра, входы которого соединены со входом и выходом резонансного фильтра, а выход - с входом усилителя, силовой преобразователь, связанный с ним привод, блок частотной автоподстройки частоты, соединенный с приводом, пограммный блок и схему сравнения, входы которой соединены соответственно с выходами программного блока, усилителя и блока частотной автоподстройки частоты, а выходы со входами программного блока и силового преобразователя L JНедостатком данного устройства является низкая точность регулирования частоты вращения при разгоне ротора, что затрудняет проведение вибрационных испытаний роторной системы (роторопоры) . Это объясняется тем, что аналоговая цепь частотной автоподстройки не в состоянии обеспечить нестабильность частоты вращения ротора менее О,4- 0,5%, что недостаточно для спектрального 393 анализа блиаколежащих компонентов вибр харакгерисгики ротора. Кроме того, отсутствие цифрового ввоаа задания скорос ти делает невозможным прямое управление процессом балансировки с помощью электронной вбтислительной машины {ЭВМ), что существенно сужает текнические возможности балансировочного станка, в части повышения точности балансировки н возможности ее автомативации. Пель изобретения - повышение точности балансировки и обеспечение Возможности управления ее процессом с помощью ЭВМ. Указанная цель достигается тем, что ус- ройство снабжено блоком цифровой кор рекции, вьтолне-нным в виде последовательно соединенных частотного тахогенератора, формирователя импульсов, цифрового корректора и преобразователя коднапряжение, выход которого связан с третьим входом схемы сравнения, и измерителя частоты вращения, вход которого, соединен с входом цифрового коррек тора, программный блок выполнен в виде послеяоватольно соединенных генератора тактовой частоты, синтезатора частоты и преобразователя часгота-напряжение, выход которого связан с четвертым входом схемы сравнения, и задатчика скорости, подключенного к второму входу синтезатора частоты, выход последнего соединен с вторым входом цифрового кор ректора, выход генератора тактовой частоты - с вторым входом измерителя частоты вращения, а частотный тахогенерат механически связан с приводом. На чертеже приведена блок-схема уст ройства. Устройство содержит цепь 1 фазовой автоподстройки частоты, выполненную в виде датчика 2 дисбаланса, связанного с ним резонансного фильтра 3, усилителя 4 и фазометра 5, входы которого сое динены со входом и выходом резонансно1 фильтра 3, а выход - со входом усилите ля 4, силовой преобразователь 6, связан ный с ним привод 7, блок 8 частотной автоподстройки частоты, соединенный с приводом, программный блок 9, выполненный в вице последовательно соединенных генератора 10 тактовой частоты, си тезатора 11 частоты к .преобразователя 12 частота-напряжение, и задатчика 13 скорости, подключе-нного ко второму вхо синтезатора 11 частоты, блок 14 цифро вой коррекции, выполненный в виде послецовательно соединенных частотного тахогенератора 15, формирователя 16 импульсов, цифрового корректора 17 и преобразователя 18 код-напряжение, и измерителя 19 частоты вращения, вход которого связан с входом цифрового корректора 17, и схему 20 сравнения, входы которой соответственно подключены к выходам усилителя 4, блока 8 частотной автоподстройки частоты, преобразователей 18 и 12 код-напряжение и частотанапряжение, а выходы - ко входу силового преобразователя б, выход синтезатора 11 частоты, соединен со вторым входом цифрового корректора 17, выход генератора 10 тактовой частоты - со вторым входом измерителя 19 частоты вращения, а частотный, тахогенератор 15 механически связан,с приводом 7, прецназначекным для вращения ротора 21. Устройство работает следующим образом. Синтезатор 11 частоты преобразует установленное на задатчике 13 скорости требуемое для балансировки число оборотов ротора 21 в частоту следования импульсов, используя высокостабильный сигнал генератора 10 тактовой частоты. Выходное задающее воздействие программного блока 9 в виде периодической последовательности импульсов преобразуется преобразователем 12 частота-напряже- ние Bi непрерывный сигнал и, сравнивается в схеме 20 сравнения с сигналом с выхода блока 8 частотной автопоцстройки частоты, пропорциональным частоте вращения привода 7. Сигнал рассогласования с выхода схемы 20 сравнения отрабатывается Силовым преобразователем 6, воздействуя на привод 7 и через него на балансируемый ротор 21, осуществляя его разгон до заданной части балансировки, на которую предварительно настроен.резонансный фильтр 3 в цепи 1 фазовой автоподстройки частоты. Получение более высокой точности регулирования достигают дополнительным корректирующим сигналом-в виде периодической последовательности импульсов с частотой, пропорциональной угловой скорости привода 7, который получают с помощью частотного тахогенератора. 15, например, генерирующего ЗОО импульсов за 1 оборот ротора, и формирователя 16 импульсов. После сравнения в цифровом корректоре 17с высокостабильным сигналом генератора 10 тактовой частоты
сигнал ошибки преобразуется в напряжение и поступает на один из входов схемы 2О сравнения, осуществляя дополнитель- кую коррекцию частоты вращения ротора 21. Для измерения и индикации на цифро- $ вом табло частоты вращения ротора 21 применяется измеритель 19 частоты вращения, на один вход которого поступает сигнал с выхода формирователя 16 импульсов, на другой - сигнал с генератора 1О тактовой час- тоты. Время измерения выбирается таким образом, .чтобы на цифровом табло индицировался результат, соответствующий частоте вращения привода 7 в об/мин.
При достижении ротором 21 заданной 5 частоты балансировки на выходе фазометра 5 появляется ргапряжение, которое после усиления в усилителе 4 замыкает цепь 1 фазовой автоподстройки частоты.
В случае изменения по каким-либо 20 причинам резонансной частоты фильтра 3 сигнал на его выходе получает фазовый сдвиг, отражающийся на величине выходного напряжения фазометра 5, которое зависит от сдвига по фазе между сигна- 25 лами, подаваемыми на его входы. Усиленное усилителем 4 выходное напряже. ние поступает на одиниз входов .схемы 20 сравнения и далее отрабатывается силовым преобразователем 6, корректи- 30 руя частоту вращения ротора 21 таким 1збразом, чтобы она точно соответствовала резонансной частоте фильтра 3.
Предлагаемое устройство в сравнении с известными, за счет введения блока 35 цифровой коррекции, обеспечивает более точное регулирование частоты вращения ротора в процессе разгона, что позволяет значительно расширить возможности спектрального анализа амплигудно-час- 40 тотных характеристик рртора. Кроме того цифровой ввод задания позволяет осуществить прямое управления балансиро вочным станком от ЭВМ; в частности, по заданной программе производить раз- 45 гон ротора с переменным ускорением. Формула изобре тения
Устройство для управления вращение(М шпинделя балансировочного станка, содержащее цепь фааовой автоподстройки частоты, выполненную в виде датчика дисбаланса, связанного с ним резонансного фильтра, усилителя и фазометра, входы которого соединены с входом и выходом резонансного фильтра, а выход - Свходом усилителя, силовой преобразователь, связанный с ним привод, блок частотной автоподстройки частоты, соединенный с приводом, программный блок и схему сравнения, входы которой соединены соответственно с выходами усилителя и блока частотной автоподстройки частоты, а выход - с входом силового преобразователя, отличающееся тем, что, с цельй повышения точности балансировки и обеспечения возможности управления ее процессом с помощью ЭВМ, оно снабжено блоком цифровой коррекции, выполненным в виде последовательно соединенных частотного тахогенератора, формирователя импульсов, цифрового корректора и преобразователя код-напряжени выход которого связан с третьим входом схемы сравнения, и измерителя частоты вращения, вход которого соединен с входом цифрового корректора, программный блок выполнен в виде последовательно соединенных генератора тактовой частоты синтезатора частоты и преобразовател$ частота-напряжение, выход которого связан с четвертым входом схемы сра.внения, и задатчика скорости, подключенного к второму входу синтезатора, частоты, выход последнего соединен с вторым входом цифрового корректора, выход генератора тактовой частоты - с вторым входом измерителя частоты вращения, -а частотный тахогенератор механически связан с приводом.
Источники информации, принятые во внимание при экспертизе
кл. G О1 М 1/22, 1979 (прототип).
vwoifvpyng vvu/in trwMOffC wf fu neffff/fjjjf
