1
Г(21) 4499239/25-28 (22) 28.10.88 (46) 30.11.90. Бкхт. N 44 (72) В.И. Крупник, Г.С. Кулаков, Н.Г. 1 акаров и В.М. Поляков (53) 620.1.05:531.382(088.8) (56) Суржин В.С, Методика экспериментального исследования статической прочности дисков роторов ГТВ при разгонах, испытаниях. - Техотчет f 6799, 1ШАМ, 1872, с. 22-23, 42-60.
Авторское свидетельство СССР N 1118169, кл. О 01 М 1/22, 1983.
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩЕНИЕМ УТТИНДЕЛЯ РЛЛ/ НСИРОЕО НОГО СТАНКА
(57) Изобретение относится к балансировочной технике, 1 ель изобретения - повышение то.чности за счет провед е- ния балансировки в условиях, близких к эксплуатационным. Программный блок 9 форъшрует сигнал задания, осущест- вляюнщй частоту вратцения и сравниваю- пшйся в схеме 21 сравнения с сигнала- ми-блока 8 автоподстрог кн частоты, цепи 1 гЬазовой автоподстройки частоты



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вращением шпинделя балансировочного станка | 1980 |
|
SU932327A1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1981 |
|
SU998887A2 |
| Устройство для управления вращениемшпиНдЕля бАлАНСиРОВОчНОгО CTAHKA | 1979 |
|
SU847104A1 |
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Устройство управления приводом балансировочного стенда | 1982 |
|
SU1118962A2 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ВРАЩАЮЩИХСЯ ДЕТАЛЕЙ НА РАЗРЫВ | 1989 |
|
RU2029276C1 |
| Устройство для ограничения частоты вращения привода балансировочного станка | 1987 |
|
SU1441213A1 |
| Стенд для испытания вращающихся деталей на разрыв | 1990 |
|
SU1827569A1 |
| Устройство для автоматической фокусировки излучения на носителе в системе записи-воспроизведения информации | 1989 |
|
SU1705861A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |

Изобретение относится к балансировочной технике. Цель изобретения - повышение точности за счет проведения балансировки в условиях, близких к эксплуатационным. Программный блок 9 формирует сигнал задания, осуществляющий частоту вращения и сравнивающийся в схеме 21 сравнения с сигналами блока 8 автоподстройки частоты, цепи 1 фазовой автоподстройки частоты и блока 15 цифровой коррекции. Сигнал рассогласования через силовой преобразователь 6 воздействует на привод 7, разгоняющий ротор 27 до частоты балансировки, после чего блок 53 автоматики выдает системе 39 нагрева ротора команду на нагрев. Регулировка скорости разгона осуществляется с помощью логических элементов 11 и 36 И. При совпадении частоты вращения и температуры с эксплуатационными сигнал с второго компаратора 35 открывает управляемый клапан и струя подогретого сжатого газа возбуждает в лопатках ротора 27 колебания с уровнем, задаваемым блоком 31 регулирования амплитуды. Разность сигналов с датчика 49 температуры ротора и датчика 48 температуры газа отрабатывается регулятором 45 температуры. 2 ил.
О5
о со со со.
иг1
и блока 15 цифровой коррекщ1и. Сигнал рассогласования через силовой преобразователь 6 воздействует на привод 7, разгоняюЕ1;ий ротор 27 до частоты балансировки, после чего бло 53 автоматики вьщает системе 39 нагрева ротора команду на нагрев. Регулировка скорости разгона осуществляется с помощью логических элементов И 11 и 36. При совпадении частоты вращения и температуры с зксплуатаИзобретение относится к балансированной технике и может быть использовано в балансировочных станках для 20 управления частотой вращения электропривода при исследовании гибких роторов.
Цель изобретения - расширение функи юнальных возможностей устрой- 25 ства, обеспечивающее повышение точности балансировки за счет создания условий ее проведения, близких к эксплуатадаонным.
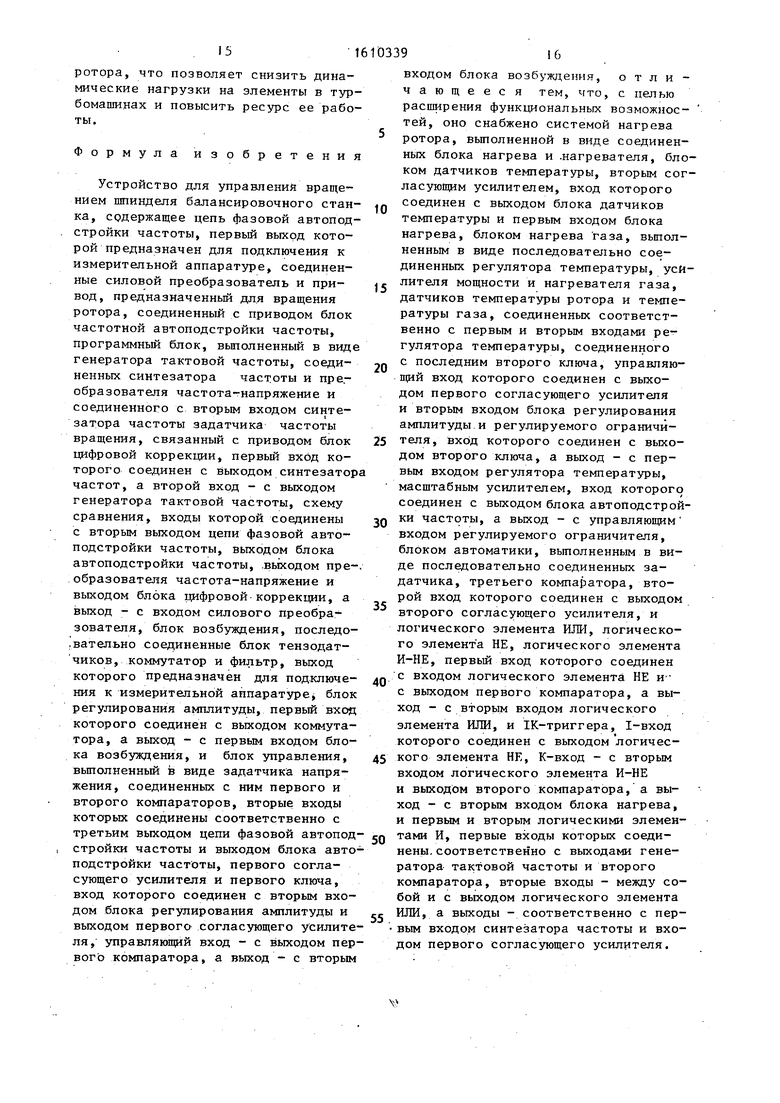
На фиг. 1 изображена структурная о схема предлагаемого устройства; на фиг. 2 - структурная схема блока автоматики.
Устройство содержит цепь 1 фазовой автоподстройки частоты, выполнен- 5 ную в виде датчика 2 дисбаланса, связанного с ним резонансного фильтра 3, выход которого .предназначен для соединения с первым каналом измерительной аппаратуры (не показан), уси- до лителя 4 и фазометра 5, входы которого соединены с входом и выходом резонансного фильтра 3, а выход - с входом усилителя 4, соединенные силовой преобразователь 6 и привод 7, дз блок 8 частотной, автоподстройки частоты, связанный с приводом 7, программный блок 9, выполненньш в виде последовательно соединенных генератора 10 тактовой частоты, первого Q логического элемента И 11, синтезатора 12 частоты и преобразователя 13 частота - напряжение и задатчика 14 частоты вращения, подключенного к второму входу синтезатора 12 частоты, блок 15 цифровой коррекции, выполненный в виде последовательно соединенных частотного тахогенератора 16, механически связанного с приводом 7,
1 1онными сигнал с второго компаратора 35 открывает управляемый клапан и струя подогретого сжатого газа возбуждает в лопатках ротора 27 колебания с уровнем, задаваемым блоком 31 регулирования амплитуды. Разность сигналов с датчика 48 температуры ротора и датчика 49 температуры газа отрабатывается регулятором 45 температуры. 2 ил.
формирователя 17 и тульсов, цифрового корректора 18, второй вход которого соединен с выходом синтезатора 12 частоты, и преобразователя 19 код- напряжение и измерителя 20 частоты вращения, входы которого подключены к выходам соответственно формирователя 1 7 импульсов и генератора 10 тактовой частоты, .схемы 21 сравнения, входы которой подключены к выходам усилителя 4, блока 8 автоподстройки частоты, преобразователя 19 код-напряжение и преобразователя 13 частота-напряжение, а выход - к входу силового преобразователя 6, блок 22 возбуждения, выполненный в виде последовательно соединенных источника 23 сжатого газа, управляемого клапана 24 , управляемого вентиля 25 и сопла 26 для возбуждения колебаний лопаток балансируемого ротора 27, механически связанного с приводом 7, последовательно соединенные блок 28 тензодатчиков, вьшолненный в виде системы тензодатчиков, механически связанной с лопатками ротора 27, коммутатор 29, фильтр 30, выход которог предназначен для соединения со вторым каналом измерительной аппаратуры, блок 31 регулирования амплитуды, первый вход которого соединен с выходом коммутатора 29, а выход - с управляющим входом управляемого вентиля 25, блок-32 управления, выполненный в виде соединенных задатчика 33 напряжения и первого тора 34 и последовательно соединенны второго компаратора 35, входы которого соединены со вторым выходом задат . чика 33;напряжения и выходом фазометра 5, второго логического элемента К 36 , первого согласующего усилителя 37 и первого.ключа 38, управля юпгий вход которого соединен с выход первого компаратора 34, а выход - с управляюпгим входом управляемого кпана 24, систему 39 нагрева ротора 27, вьтолненную в виде соединенных блока 40 нагрева и нагревателя 41, второй согласуюп(ий усилитель 42, содиненный с ним и блоком 40 нагрева, блок 43 датчиков температуры, блок - 44 нагрева газа, выполненный в виде последовательно соединенных регулятра 45 температуры, усилителя 46 мощности и нагревателя 47 газа, соединенных со входами регулятора 45 температуры, датчика 48 температуры ротора и датчика 49 температуры газа, второго ключа 50, вход которого соединен с выходом регулятора 45 температуры, а управляюпщй вход - с вторы входом блока 31 регулирования амплитуды и с вькодом первого согласующего усилителя 37, и регулируемого ограничителя 51, вход которого соединен с выходом второго ключа 50, а выход - с первым входом регулятора 45 температуры, масштабный усилитель 52, вход которого соединен с вторым входом первого компаратора 34 и выходом блока 8 автоподстройки частоты, а выход - с управляющим входом регулируемого ограничителя 51, и блок 53 автоматики; выполненный в виде последовательно соединенных задатчика 54, третьего компаратора 55, второй вход которого является первым входом блока 53 автоматики и соединен с выходом второго согласующего усилителя 42, и логического элемента ИЛИ 56, выход которого является первым выходом блока 53 автоматики и соединен со вторыми входами первого 11 и второго 36 логических элементов И, логического элемента НЕ 57, логического элемента И-НЕ 58, первый вход которого является третьим входом блока 53 автоматики и соединен со входом логического элемента НЕ 57 и с выходом первого компаратора 34, а выход - с вторым входом логического элемента ИЛИ 56, и 1К-тритгера 59, 1-вход которого соединен с выходом логического элемента 57 НЕ, К-вход - с
вторым входом логического элемента И-НЕ 58, и выходом второго компаратора 35 и является вторым входом блока автоматики, а выход - с вторым входом
- ом аем
1610339
м а
10
15
20
50
5
блока 40 нагрева и является вторым выходом блока автоматики.
Устройство работает следующим образом.
Перед началом балансировки и исследования ротора 27 экспериментальным или расчетным путем определяют с учетом температурного градиента частоту резонансных колебаний лопаток и настраивают на нее фильтр 30, полосу пропускания которого для уменьшения погрешностей измерения параметров колебаний выбирают более широкой по сравнению с резонансным фильтром 3.
Так как частота резонансньпх колебаний лопаток нагретого pofopa 27 кратна частоте его вращения, поддерживаемой при балансировке, то резонансный фильтр 3 настраивают на частоту fр, соответствующую .заданной частоте балансировки.
С иелью компенсации остаточного 25 дисбаланса ротора 27, вызванного-дополнительными динамическими неуравно- вешенностями при возникновении в реальных условиях эксплуатации резонансных колебаний системы диск-лопатки, ротор 27 нагревают до создания на нем температурного поля, близкого к эксплуатационному, и балансируют на ближайшей рабочей частоте вращения, сопровояэдающейся резонансными колебаниями лопаток.
Перед разгоном привода 7 с первого выхода блока 53 автоматики сигнал логической 1 воздействует на второй вход первого логического элемента И 11, разрешая прохождение импульсов с генератора 10 тактовой частоты на первый вход синтезатора 12 частоты, и на второй вход второго логического элемента И 36, разрешая прохождение сигнала с выхода второго компаратора 35 на вход первого согласующего усилителя 37. Г, это время сигнал логического О со второго выхода блока 53 автоматики воздействует на вход блока 40 нагрева, представляющего собой, например, систему индукционного нагрева, и запрещает нагрев ротора 27. .
Синтезатор 12 частоты преобразует установленное на задатчике 14 частоты вращения, требуемой для баланси-. ровки число оборотов ротора 27 в частоту следования импульсов, используя высокостабильный сигнал
30
35
40
45
716
генератора 10 тактовой частоты. Выходное задающее воздействие программного блока 9 в виде периодической последовательности импульсов преоб- разуется преобразователем 13 частота - напряжение в непрерывный сигнал и сравнивается в схеме 21 сравнения с выходным, сигналом блока 8 частотной автоподстройки частоты, пропор- циональным частоте вращения привода 7, с дополнительный корректирующем сигналом, поступаю1н 1м с блока 15 цифровой коррекции, и вькодным сигналом цепи 1 фазовой автоподстройки частоты, в которой резонансный фильтр 3 настроен на частоту, соответствующую заданной частоте балансировки ротора 27i
Сигнал рассогласования с выхода схемы 21 сравнения отрабатывается силовьш преобразователем 6, воздействует на привод 7 и через него -,на балансируемый ротор 27, осуществляя его разгон до заданной частоты балан- сировки..
По мере разгона привода 7 увеличивается сигнал Ug на выходе блока 8 частотной автоподстройки частоты и воздействует на второй вход первого компаратора 34, выходной сигнал которого изменяется в соответствии с выражением
и
Ki
при. Ug
и
33
О, при Ug с U,j ;
33
и
К1
где и - постоянный сигнал задания с первого выхода задатчика 33 напряжения; }зыходной сигнал первого компаратора 34, соответст вующий уровню логической 1.
В это же время с датчика 2 дисбаланса, установленного на опоры балансируемого ротора 27, переменный сигнал и,2 с нарастающей частотой f поступает на вход резонансного фильра 3, на выходе которого появляется сигнал Uj, сдвинутый относительно входного сигнала Ug угол Ц , определяемый его фазочастотной характеристикой
fl До f Cl ц, -arctg --( - j-)J.
где dg - эквивалентное зат тсание резонансного фильтра 3.
8
Уменьшающийся по мере возрастания частоты f сигнала U, угол Lp измеряется фазометром 5, с выхода которого на второй вход второго компаратора 35 поступает сигнал
и -К5Ц,
где К - коэффициент передачи фазометра 5.
На выходе второго компаратора 35 сигнал изменяется в соответствии с выражением
U|J2 , при Uj О, при .и5
и|.
0 5
О
5
45
дО
Q
в котором и 55
33
К2
ПОСТОЯННЫЙ сигнал задания со второго выхода задатчика 33 напряжения; выходной сигнал второго компаратора 35, соответствуюп1ий уровню логической 1. Уровень сигнала U, определяемьш первой уставкой задатчика 33 напряжения, выбирают так им, чтобы исключить влияние на блок 22 возбуждения колебаний лопаток фазометра 5, находящегося в неопределенном неусто1йчивом состоянии при малых оборотах или остановке привода из-за отсутствия или малого сигнала, поступающего на вход резонансного фильтра 3 с датчика 2 дисбаланса. .
Уровень сигнала U|j, определяемый второй уставкой задатчика 33 напряжения, выбирают исходя из величины (о ; минимального фазового рассогласования, устанавливающего границу появления резонанса вблизи частоты f-, соответствующей заданной частоте балансировки ротора 27.
До тех пор, пока частота враще1дая ротора 27 не достигнет уровня, опре- деляемо о уставкой U 33 задатчика 33 напряжения, сигнал логического О с выходов первого 34 и второго 35 компараторов удерживает в разомкнутом состоянии первый ключ .38, исключая работу блока 22 возбуждения, воздействует на второй вход блока 31 регулирования амплитуды и препятствует поступлению с его выхода на управляющий вход упра вляемого вентиля 25 управляющего сигнала, воздействует на третий вход блока 53 автоматики, не изменяя соотношение его выходных
сигналов,.удерживает второй ключ 50 в замкнутом состоянии, способствуя в.кпючению в цепь обратной связи регулятора 45 температуры регулируемого ограничителя 51. При этом на выходе регулятора 45 температуры, находящегося при отключении блока 2 возбуждения в неопределенном состоянии, при котором вследствие само- произвольного подогрева вращающегос в воздушной среде ротора 27 сигнал выхода датчика 48 температуры ротор устанавливаемого в возбуждаемой о- ласти, увеличивается и преобладает над уровнем сигналов с датчика 49 темпера:туры газа, формируется сигна нарастающий при разгоне привода 7 по закону
.п
где К- - коэффициент передачи блока 8 частотной автоподстройки чаототы; Кдд - коэффициент передачи мае-.
штабного усилителя 52; п -- частота вращения привода 7 Нарастающий сигнал и45Усиливает- с помощью усилителя 46 мощности
воздействия на нагреватель 47
ся
и,
газа, способствует его постепенному
разогреванию.
При достижении приводом 7 заданной уставкой Uj2 частоты вращения на выходе первого компаратора 34 появля ется сигнал уровня логической 1, который замыкает первый ключ 38, подготавливая блок 22 возбуждения к работе, и воздействует на третий вход блока 53 автоматики. Со второго выхода последнего на блок 40 нагрева поступает разрешающий сигнал логической 1, запускающий его в работу. В блок 40 ,нагрева предварительно введены данные, определяющие максимальные и минимальные температуры различных областей ротора 27, нагрев которого осуществляется с помощью нагревателя 41, представляющего собой, например, систему индукторов. Ин- формация о состоянии нагрева в виде непрерывных сигналов вводится с блока 43 датчика температуры на входы блока 40 нагрева и через третий усилитель 42 - на первый вход блока 53 автоматики.
Когда частота вращения привода 7 достигнет значения, при котором сигнал Ug с фазометра 5 снизится до
61033910
уровня уставки сигнала
10
15
20
, задаваемой задатчиком 33 напряжения, изменится состояние второго компаратора 35, выходной сигнал и 2логической 1 которого воздействует одновременно на первый вход второго логического элемента И 36 и на второй вход блока 53 автоматики, который определяет состояние нагрева ротора 27. .
Если к этому времени ротор 27 не нагрелся до заданного состояния, то на первом выходе блока 53 автоматики появляется сигнал логического
О , который одновременно воздействует на вторые входы первого 11 и второго 36 логических элементов И, запрещая прохождение через них еди25
30
5
ничньгх импздхьсов с выходов соответственно генератора 10.тактовой частоты и второго компаратора 35, вследствие чего прекращается нарастание задающего сигнала программного блока 9, а блок 22 возбуждения остается в выключенном состоянии. Привод 7 вращается с постоянной частотой вращения, соответствующей границе области резонанса лопаток, до тех пор, пока температура ротора 27 не достигнет заданного значения.
При установлении на поверхности ротора 27 заданной максимальной температуры, 0 чем свидетельствует сиг- 2J нал с блока 43 датчиков температуры, устанавливаемых в наиболее теплоемкой области, поступающего на первый вход блока 53 автоматики через второй согласующий, усилитель 42, на первом выходе блока 53 автоматики формиру-: ется сигнал логической 1, разрешая прохождение через первый 11 и второй 36 логические элементы И задержанных сигналов.
С этого времени продолжается нарастание сигнала задания программного блока 9, а следовательно, дальнейший разгон привода 7 до заданной частоты балансировки ротора 27. Усиленный с помощью первого согласующего усилителя 37 единичный сигнал второго компаратора 35 через замкнутый первый ключ 38 воздействует на управляющий вход управляемого клапана 24 и открывает его. При этом газ от источника 23 сжатого газа через управляемый клапан 24 и управляемьш вентиль 25 поступает в сопло 26, которое формирует и направляет струю
40
5
0
10
15
20
25
газа через нагреватель 47 газа на лопатки вращающегося ротора 27 и возбуждает их колебания.
Одновременно сигнал логической 1 с выхода первого согласующего усилителя 37 воздействует на управляющий вход второго ключа 50 и размыкает его на второй вход блока.31 регулирования амплитуды- разрешая его работу.
При размыкании второго ключа 50 отключается, регулируемый ограничитель 51, в результате чего регулятор 45 температуры, выполненный, например, на базе операционного усилителя с пропорциональным или интегральным законом регулирования, с по- мощью усилителя 46 мощности устанавливает температуру нагревателя i 47 газа такой, чтобы температура . проходящей через него стр уи газа, контролируемая с помощью датчика 49 температуры газа, соответствовала температуре лопаток, контролируемой с помощью датчика 48 температуры ротора. Этим исключается искажение созданного температурного поля балансируемого ротора 27.
Заданный уровень колебаний лопаток достигается подачей на управляющий вход управляемого вентиля 25 задающего сигнала с блока 31 регулирования амплитуды, величина которого определяет расход газа-через сопло
26и устанавливается с учетом сигнала на выходе коммутатора 29.
Если интенсивность нагрева ротора
27установлена такой, что к моменту достижения приводом 7 частоты вращения, при которой сигнал Uj фазометра 5 достигнет заданного уровня и|з , то он нагревается до заданной максимальной температуры, а разгон привода 7 до частоты балансировки происходит без остановки, так как на первом выходе блока 53 автоматики непрерывно действует сигнал логической 1 Ч
Во время вращения ротора 27 с заданной частотой цо первому каналу из- Q мерительной аппаратуры, присоединенному к выходу резонансного фильтра 3, происходит измерение и регистрация значения и угла дисбаланса, по второму каналу измерительной аппаратуры, - присоединенному к выходу фильтра 30, на вход которого через многоканальный, коммутатор 29 поступают сигналы с блока 28 тензодатчиков, установленных
16103391
на лопатках и диске балансируемого ротора 27, происходит измерение и регистрация параметров резонансных колебаний лопаток, диска и системы диск-лопатки.
Индикация на цифровом табло частоты вращения ротора 27 осуществляется измерителем 20 частоты вращения, на один вход которого поступает с выхода формирователя 17 импульсов, на другой - сигнал с генератора 10 тактовой частоты.
После проведения необходимых измерений производят остановку привода 7.
Как только частота его вращения снизится до уровня, при котором сиг30
35
40
45
нал ис рассогласования с фазометра 5 превысит величину уставки сигнала и со второго выхода.задатчика 33 напряжения, на выходе второго компаратора 35 появится нулевой сигнал, воздействующий на первьй вход второго логического элемента 36 И и на второй вход блока 53 автоматики, со второго выхода которого команда в виде сигнала логического О на прекращение нагрева ротора 27 поступает на блок 40 нагр.ева.
Одновременно исчезает сигнал на выходе первого согласующего усилителя 37, что приводит к закрытию управ- ляемого клапана 24, который прекращает подачу газа через управляемый вентиль 25 и сопло 26, отключению блока 31 регулирования амплитуды и за мыканию второго ключа 50, способствуя включению в цепь обратной связи регулятора 45 температуры регулируемого ограничителя 51. С этого времени по мере снижения частоты вращения привода 7 происходит постепенное охлаждение нагревателя 47 газа.
С момента достижения приводом 7 малых частот вращения до его остановки сигнал с выхода блока 8 частотной автоподстройки частоты становится меньще уровня сигнала уставки с первого выхода задатчика 33 напря- женчя, что приводит к появлению на выходе первого компаратора 34 сигнала логического О и размыканию первого ключа 38. Это исключает воз-, можность открытия управляемого клапана 24 пси ложном исчезновении сигнала на. выходе фазометра 5.
. Блок 53 автоматики работает еле дующим образом.
0
5
Q -Как только частота его вращения снизится до уровня, при котором сиг0
5
0
45
нал ис рассогласования с фазометра 5 превысит величину уставки сигнала и со второго выхода.задатчика 33 напряжения, на выходе второго компаратора 35 появится нулевой сигнал, воздействующий на первьй вход второго логического элемента 36 И и на второй вход блока 53 автоматики, со второго выхода которого команда в виде сигнала логического О на прекращение нагрева ротора 27 поступает на блок 40 нагр.ева.
Одновременно исчезает сигнал на выходе первого согласующего усилителя 37, что приводит к закрытию управ- ляемого клапана 24, который прекращает подачу газа через управляемый вентиль 25 и сопло 26, отключению блока 31 регулирования амплитуды и замыканию второго ключа 50, способствуя включению в цепь обратной связи регулятора 45 температуры регулируемого ограничителя 51. С этого времени по мере снижения частоты вращения привода 7 происходит постепенное охлаждение нагревателя 47 газа.
С момента достижения приводом 7 малых частот вращения до его остановки сигнал с выхода блока 8 частотной автоподстройки частоты становится меньще уровня сигнала уставки с первого выхода задатчика 33 напря- женчя, что приводит к появлению на выходе первого компаратора 34 сигнала логического О и размыканию первого ключа 38. Это исключает воз-, можность открытия управляемого клапана 24 пси ложном исчезновении сигнала на. выходе фазометра 5.
. Блок 53 автоматики работает еле дующим образом.
Перед началом работы устройства производится установка нуля IK- триггер 59.
С выхода задатчика 54 на первый вход третьего компаратора 55 поступает постолиньш сигнал П задания, соответствуюп(ий заданной максимальной температуре ротора 27, и сравнивается с сигналом U(t),. соответствующим текущей температуре Tp(t); поступающим на его второй вход чере первый вход блока 53 автоматики.
На выходе компаратора 55 сигнале изменяется в соответствии с выражением
и, при U(t) 054 О, при U(t)
где и - выходной сигнал компаратора 55, соответствуюи1ий уровню логической 1.
При воздействии на второй и третий блока 53 автоматики сигнала логического О на его первом выходе, соединенном с выходом логического элемента ИЛИ 56, устанавливается сигнал логической 1. С выхода логического элемента НЕ 57 сигнал логической 1 впзпействует на .1-вход 1К-триггера 59, не изменяя его нулевого состояния, при котором .на его выходе, соединенном со вторым выходом блока 53 автоматики, устанавливается сигнал логического О.
До тех пор, пока на третьем входе блока 53 автоматики не появится сигнал логической 1, на его втором входе сохранится сигнал логического О.
При поступлении на третий вход блока 53 автоматики сигнало логической 1 на вых оде логического элемента НЕ 57 появляется сигнал логического О и переводит 1К-триггер 59 в противоположное состояние, при котором на его выходе устанавливается единичный сигнал.
Если после этого на второй вход блока 53 автоматики поступит сигнал логической 1, состояние 1К-тригге- ра 59 не изменится, а на выходе логического элемента И-НЕ 58 появится нулевой сигнал, который при малом сигнале на первом входе блока 53 автоматики или при его отсутствии изменит уровень выходного сигнала
10
5
0
0
5
0
логического элемента ИЛИ 56 на нулевой.
Если нарастаюимй сигнал, поступа- юп1ий на первый вход блока 53 автома- тики, достигнет уровня Ug, устанавливаемого задатчиком 54, то на выходе третьего компаратора 55 появится сигнал логической 1, при котором во всех случаях на выходе логического элемента ИЛИ 56 сохранится е. инич- ный уровень сигнала.
При повторном поступлении на второй вход блока 53 автоматики сигна- ,, ла логического О, который воздействует на К-вход 1К-триггера 59, последний переходит в исходное состояние, при котором на его выходе устанавливается нулевой сигнал. При повторном поступлении на третий вход блока 53 автоматики сигнала логического О на выходе логического элемента И-НЕ 58 устанавливается единичный сигнал, который 5 независимо ат состояния компаратора 55 устанавливает на выходе логического элемента ИЛИ 56 сигнап логической 1..
Положительный эффект от использо- Q вания предлагаемого устройства (по сравнению с известными) наиболее полно проявляется при-использовании его в качестве устройства для управления вращения пшинделя балансировочного станка при балансировке роторов, эксплуатационные частоты врашения которых расположены вблизи областей частот вращения, на которых возникают резонансные колебания в системе диск-лопатки.
Устройство по ср-авнению с устройством-прототипом за счет создания условий проведения балансировки, максимально приближенны:; к эксплуата- с ционным условиям работы ротора, позволяет в 3-4 повысить ее точность.
Вследствие того, что балансировка ротора проводится на частоте вращения, близкой к эксплуатационной, с одновременным созданием на нем температурного поля, близкого к эксплуатационному, и возбуждением колебаний систем диск-лопатки с зфо внем напряжения в лопатках, близким к эксплуатационному, устраняется дополнительная динамическая неуравновешенность, возникающая при наличии температурного поля, изменяющегося динамические свойства балансируемого
ротора, что позволяет снизить динамические нагрузки на элементы в тур- бомашинах и повысить ресурс ее работы.
Формула изобретения
Устройство для управлений вращением шпинделя балансировочного станка, содержащее цепь фазовой автоподстройки частоты, первый выход которой предназначен для подключения к измерительной аппаратуре, соединенные силовой преобразователь и привод, предназначенный для вращения ротора, соединенный с приводом блок частотной автоподстройки частоты, программный блок, выполненный в виде генератора тактовой частоты, соединенных синтезатора частоты и пре.- образователя частота-напряжение и соединенного с вторым входом синтезатора частоты задатчика частоты вращения, связанный с приводом блок цифровой коррекции, первый вход которого соединен с выходом синтезатор частот, а второй вход - с выходом генератора тактовой частоты, схему сравнения, входы которой соединены с вторым выходом цепи фазовой автоподстройки частоты, выходом блока автоподстройки частоты, .вьЬсодом преобразователя частота-напряжение и выходом блока цифровой коррекции, а выход - с входом силового преобразователя, блок возбуждения, последо- .вательно соединенные блок тензодат- чиков, коммутатор и фильтр, выход которого предназначен для подключения к измерительной аппаратуре блок регулирования амплитуды, первый вход которого соединен с выходом коммутатора, а выход - с первым входом блока возбуждения, и блок управления, вьтолненный в виде задатчика напряжения, соединенных с ним первого и второго компараторов, вторые входы которых соединены соответственно с третьим выходом цепи фазовой автоподстройки частоты и выходом блока автоподстройки частоты, первого согласующего усилителя и первого ключа, вход которого соединен с вторым входом блока регулирования амплитуды и выходом первого- согласующего усилителя, управляюш 1й вход - с выходом первого компаратора, а выход - с вторым
916
входом блока возбуждения, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено системой нагрева ротора, вьтолненной в виде соединенных блока нагрева и .нагревателя, блоком датчиков температуры, вторым согласующим усилителем, вход которого соединен с выходом блока датчиков температуры и первым входом блока нагрева, блоком нагрева газа, вьшол- ненным в виде последовательно соединенных регулятора температуры, уси- лителя мощности и нагревателя газа, датчиков температуры ротора и температуры газа, соединенных соответственно с первым и вторым входами регулятора температуры, соединенного с последним второго ключа, управляющий вход которого соединен с выходом первого согласующего усилителя и вторым входом блока регулирования амплитуды.и регулируемого ограничй- теля, вход которого соединен с выходом второго ключа, а выход - с первым входом регулятора температуры, масштабным усилителем, вход которого соединен с выходом блока автоподстрой- ки частоты, а выход - с управляющим входом регулируемого ограничителя, блоком автоматики, выполненным в виде последовательно соединенных за- датчика, третьего компаратора, второй вход которого соединен с выходом второго согласующего усилителя, и логического элемента ИЛИ, логического элемента НЕ, логического элемента И-НЕ, первый вход которого соединен
с входом логического элемента НЕ ис выходом первого компаратора, а выход - с вторым входом логического элемента ИЛИ, и 1К-триггера, 1-вход которого соединен с выходом логического элемента НЕ, К-вход - с вторым входом логического элемента И-НЕ и выходом второго компаратора, а выход - с вторым входом блока нагрева, и первым и вторым логическими элементами И, первые входы которых соединены, соответственно с выходами генератора тактовой частоты и второго компаратора, вторые входы - между собой и с выходом логического элемента
ИЛИ, а выходы - соответственно с пер- вым входом синтезатора частоты и входом первого согласующего усилителя.
фиг. г
