(54) БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ)
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное уравновешивающее устройство (его варианты) | 1981 |
|
SU965983A1 |
| Грузоподъемное устройство А.А.Шлейхера | 1980 |
|
SU880962A1 |
| Грузоподъемное уравновешивающее устройство | 1980 |
|
SU948866A1 |
| Грузоподъемное балансировочное устройство | 1980 |
|
SU931692A1 |
| Грузоподъемное уравновешивающее устройство (его варианты) | 1981 |
|
SU992409A1 |
| Домкрат | 1981 |
|
SU992411A2 |
| Устройство для дорнования | 1975 |
|
SU557885A1 |
| РУЧНАЯ ЛЕБЕДКА | 1996 |
|
RU2092425C1 |
| Грузоподъемно-уравновешивающее устройство | 1981 |
|
SU969655A1 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
1
Изобретение относится к грузоподъемным механизмам, а именно к балансировочным устройствам.
Известно балансировочное устройство, содержащее корпус, в котором расположена ось, выполненная с пазом, в котором установлен направляющий палец, конический барабан для гибкого тягового органа с прикрепленной к нему втулкой, имеющей винтовую канавку с размещенной в ней щариками и пружину сжатия, одним концом упирающуюся в регулируемый упор 1.
Недостатком известного устройства является сложность его конструкции.
Цель изобретения
упрощение конструкции устройства.
Для достижения этой цели по первому варианту выполнения устройства втулка установлена на оси, которая выполнена с винтовой канавкой, расположенной ответно винтовой канавке втулки и с буртиком, к которому поджат другой конец пружины, причем палец смонтирован на регулируемом упоре.
По второму варианту выполнения устройства, оно снабжено подвижно установленной в корпусе гильзой, на внутренней поверхности которой выполнена винтовая канавка, расположенная ответно винтовой канавке втулки, а на наружной поверхности - паз, в котором установлен палец, 5 смонтированный на корпусе, причем упор размещен в гильзе, а другой конец пружины через опорный подшипник поджат к барабану.
Кроме того, в устройстве по второму ва,д рианту барабан выполнен со ступицей, установленной в корпусе и расположенной со стороны барабана противоположной размещению ступицы.
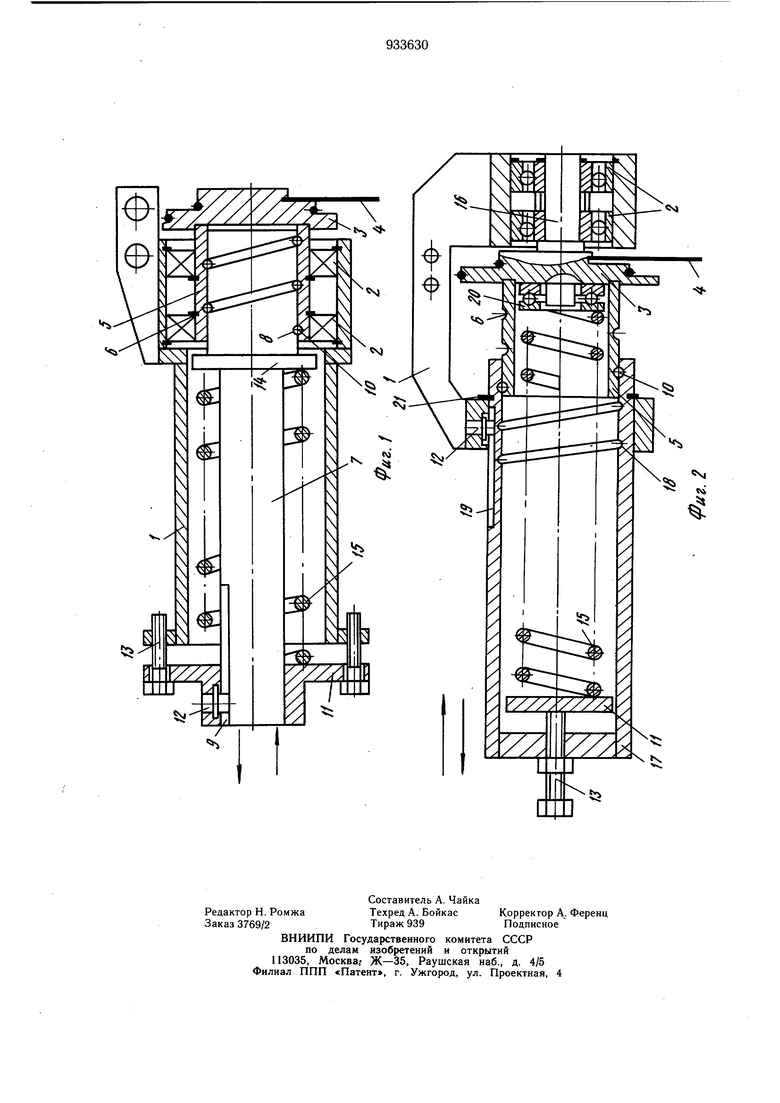
На фиг. 1 изображено устройство, первый вариант, общий вид; на фиг. 2 - то же, второй вариант.
Грузоподъемное устройство по первому варианту содержит корпус 1, в котором на подшипниках 2 установлен конический барабан 3 с гибким органом 4, свободный конец которого предназначен для связи с грузом (не показан).
На барабане 3 жестко закреплена втулка 5, на внутренней поверхности которой выполнена винтовая канавка 6. Устройство снабжено также осью 7, на одном из концов которой выполнена винтовая канавка 8 ответно винтовой канавке 6 втулки 5, а на другом конце - паз 9. В винтовых канавках 6 и 8 расположены шарики 10. На оси 7 смонтирован регулируемый упор 11 со свободно вращающимся в нем направляющим пальцем 12. Палец 12 введен в паз 9 оси 7. Регулируемый упор 11 связан с корпусом 1 болтами 13. Между упором 9 и буртиком 14 оси 7 расположена пружина сжатия 15.
Грузоподъемное устройство по второму варианту также содержит корпус 1, в котором на подщипниках 2 установлен барабан 3 со ступицей 16 и гибким органом 4, свободный конец которого предназначен для связи с грузом (не показан). На барабане 3 жестко закреплена втулка 5, на внещней поверхности которой выполнена винтовая канавка 6. Устройство снабжено также гильзой 17, установленной с возможностью поступательного перемещения, в корпусе 1. На внутренней поверхности гильзы 17 выполнена винтовая канавка 18 ответно винтовой канавке 6 втулки 5, а на наружной поверхности - продольный паз 19, В винтовых канавках 6 и 18 расположены щарики 10. На корпусе 1 установлен направляющий палец 12, в гильзе 17 - регулируемый упор 11 с болтом 13, а во втулке 5- упорный подшипник 20. Между регулируемым упором 11 и подшипником 20 установлена пружина сжатия 15. На гильзе 17 также предусмотрено ограничительное кольцо 21.
Первый вариант устройства работает следующим образом.
Настройка устройства на определенную грузоподъемность производится перемещением упора 11 болтами 13, груз при этом находится в крайнем верхнем положении. При опускании груза барабан 3 вращается и через втулку 5 и шарики 10 вращение передается на ось 7, которая при этом перемещается поступательно, сжимая буртиком 14 пружину 15. При этом усилие пружины 15 возрастает в соответствии с увеличением вращающего момента из-за увеличения диаметра витка гибкого органа 4 на коническом барабане 3. Таким образом, обеспечивается необходимый момент для удержания груза при любом диаметре витка гибкого органа 4 на барабане 3. От проворота ось 7 удерживается пальцем 12 регулируемого упора 11, введенным в паз 9 оси 7.
Второй вариант устройства работает следующим образом.
Настройка устройства на определенную грузоподъемность производится перемещением упора 11 посредством болта 13. Груз при этом находится в крайнем верхнем положении, гильза 17 упирается в ограничительное кольцо 21. При опускании груза барабан 3 вращается и через втулку 5 и шарики 10 вращение передается на гильзу 17, которая при этом перемещается поступательНО, сжимая пружину 15. От проворота гильза 17 удерживается направляющими пальцем 12. При вращении барабана 3 усилие пружины 15;,возрастает в соответствии с увеличением вращающего момента из-за увеличения диаметра витка гибкого органа 4 на коническом барабане 3. Таким образом, обеспечивается необходимый момент для удержания груза при любом диаметре витка гибкого органа 4 на барабане 3.
Таким образом, предлагаемые технические рещения позволяют получить следующие преимущества: увеличение грузоподъемности устройства не усложняя &го конструкции, избегая применения сложной в изготовлении спиральной пружины с высокими характеристиками упругости, упрощение конструкции и технологии изготовления вообще ввиду отсутствия червячной передачи и спиральной пружины.
Формула изобретения
Источники информации,
принятые во внимание при экспертизе
заявке № 2876196, кл. В 66 D 1/54, 20.10.80.
