Изобретение относится к грузо- подъемным механиэма л, а именно к грузоподъемно-уравновешивсцощим устройствам.
Известно грузоподьемно-уравновешиваюцее устройство, содержаицее корпус, в котором размещены регулируемый упор, установленная с возможностью поворота ось, на которой жестко посажен барабан для гибкого тягового органа, и пластинчатая пружина, один конец которой жестко прикреплен к регулируемому упору, а другой имеет контактный элемент, взаимодействующий со спиральными направляющими Г i .
Недостатком известного устрой-ства является сложность его конструкции.
Цель изобретения - упрощение конструкции устройства. .
Для достижения поставленной цели спиральные направляющие выполнены в виде прорезей в торце дисков, зкестко закрепленных на оси.
Кроме того барабан выполнен коническим, а спираль прорезей выполнена логарифмической.
Кроме того, барабан выполнен цилиндрическим, а форма спирали определяется из уравнения
.,
где р - переменный радиус кривизны спирали/
м момент, создаваемый в дис10ках;
угол поворота радиуса р
ч с постоянная, выбираемая из конструктивных соображений;
к жесткость пружины.
15 Кроме того, с целью -увеличения гидроподъемности устройства, оно снабжено дополнительной пластинчатой пружиной, а в дисках симметрично основным выполнены аналогичные спи20ральные прорези, в которые введен контактный элемент дополнительной пружины.
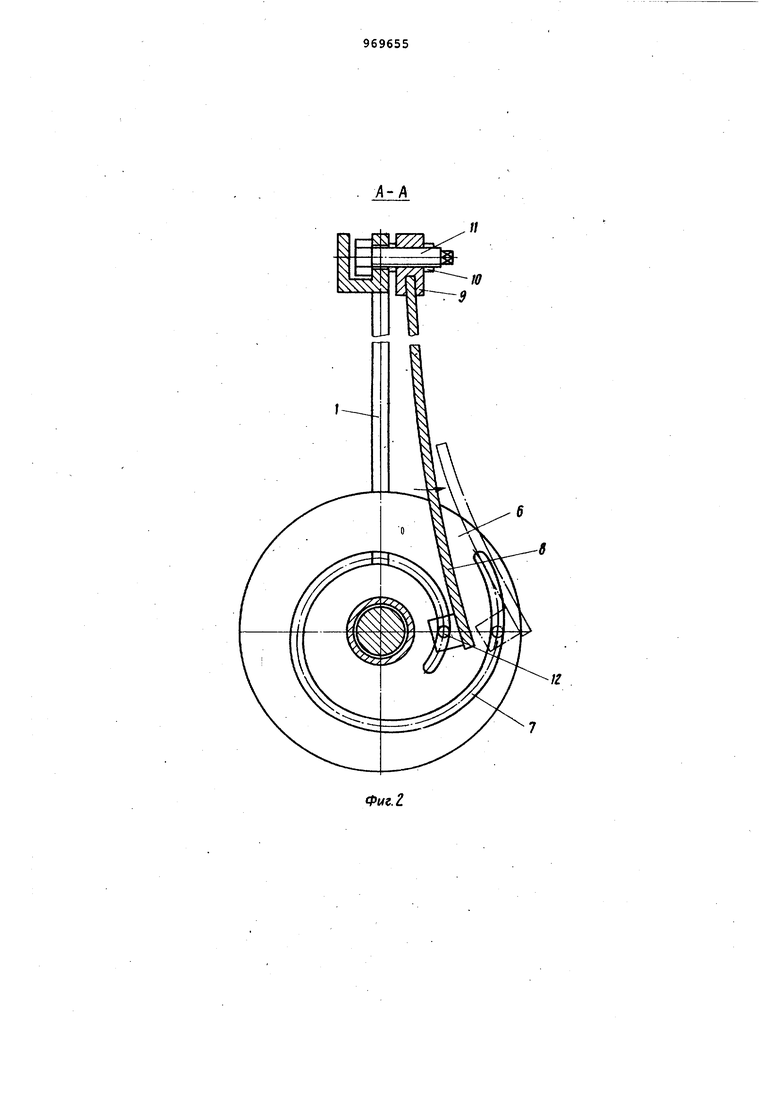
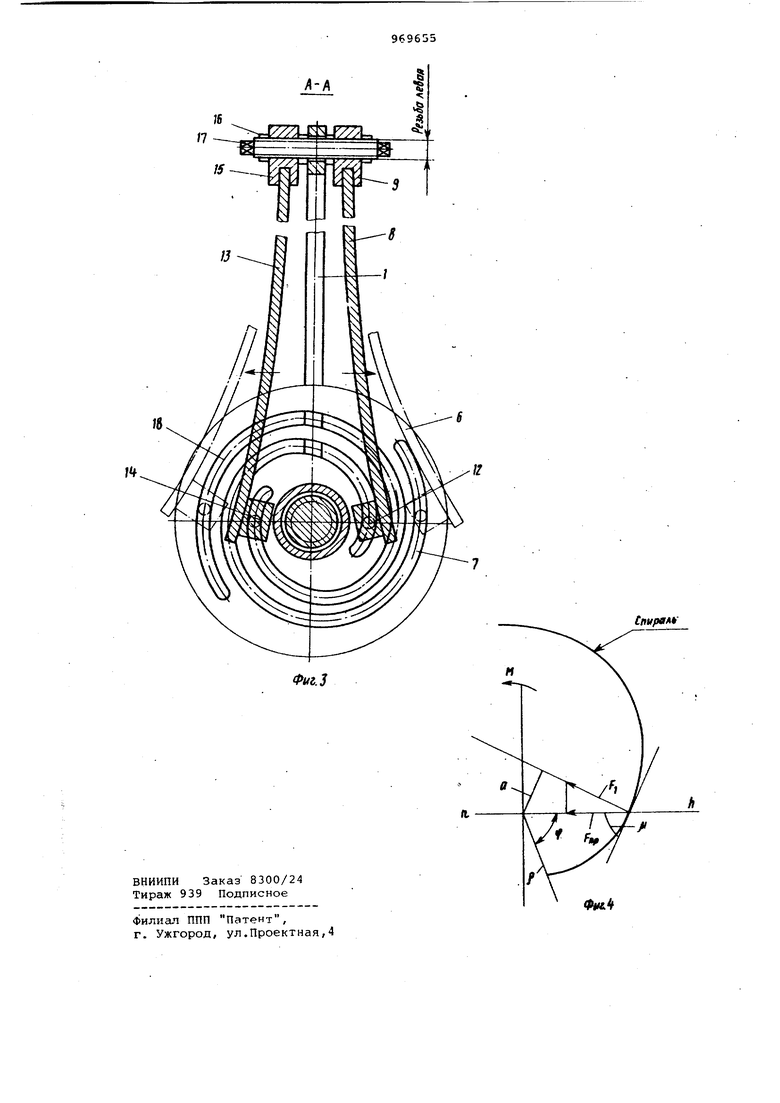
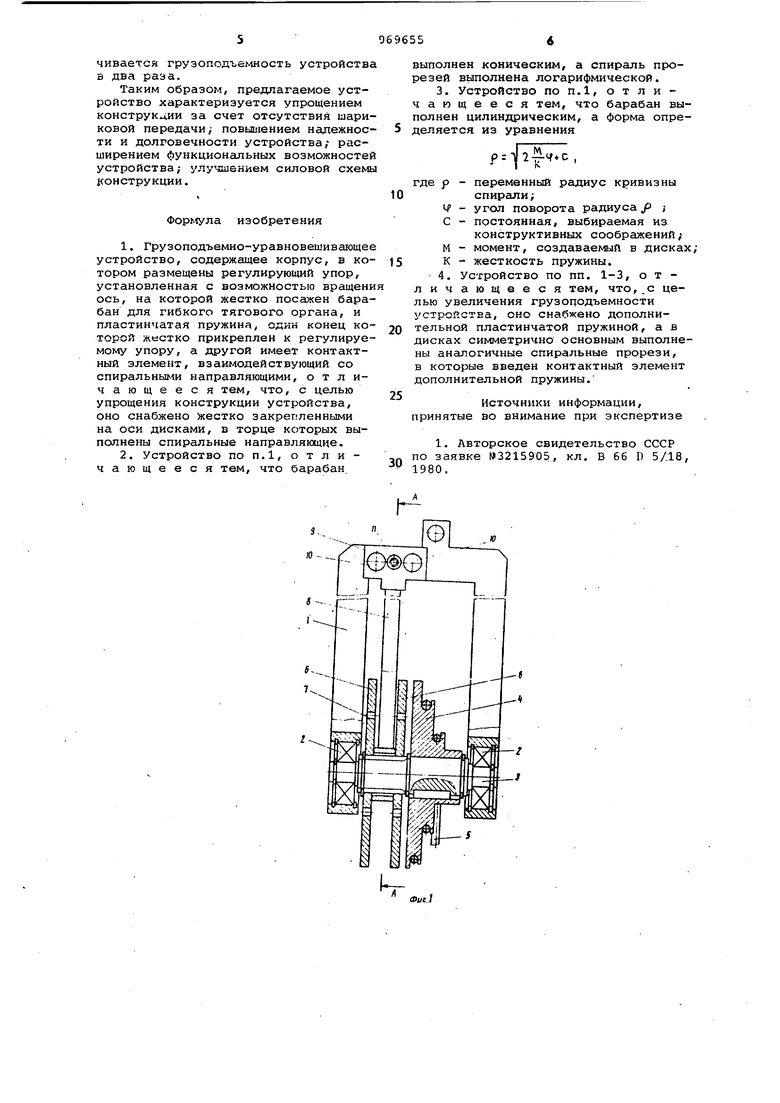
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 25разрез АгА на фиг. 1; на фиг. 3 то же, вариант; на фиг. 4 - график построения кривой.
Грузоподъемно-уравновешивающее устройство содержит корпус 1, в ко30тором на подшипниках 2 установлен вал 3 с жестко закрепленным на нем коническим барабаном 4 с гибким тяговым органом 5, свободный конец которого предназначен для связи с грузом (не показан). На валу 3 жестко установлено два диска 6, в которых выполнены идентичные прорези 7 по форме логарифмической спирали. Устройство снабжено также пла тинчатой пружиной 8 и регулирующим упором 9, установленным с возможнос тью горизонтального перемещения по скалкам 10 посредством болта 11 относительно корпуса 1. Пружина 8 одним концом жестко крепится на упор ДРУГОЙ конец снабжен утолщением, в которое вставлен с возможностью вра щения контактный элемент, выполненн в виде пальца 12, помещенный между дисками 6 и введенный в прорези 7. При выполнении барабана 4 цилинд рическим (не показан) форма спираль ных прорезей определяется по формул радиус кривой; момент, создаваемый в угол проворота радиуса р ; постоянная, выбираемая из конструктивных соображений; жесткость пружины. В качестве пластинчатых пружин 8 и 13 для значительного увеличения грузоподъемности возможно использование рессор. Устройство In.4 формулы) содержит дополнительную пластинчатую пружину 13 с пальцем 14, которая жестко кре пится на регулирующем упоре 15. Упоры 9 и 15 перемещаются по скалка 16 относительно корпуса 1 при помощи болта 17, имеющего резьбу правой и левой нарезок. При этом.в дисках 6под палец 14 выполнены дополнител ные прорези 18, аналогичные прорезя 7и расположенные симметрично основ ным, т.е. смещены относительно них на 180°. Устройство с коническим барабано работает следующим образом. Настройка устройства на определенную грузоподъемность производитс перемещением по скалкам 10 регулирующего упора 9 посредством болта 11,груз при этом находится в крайнем верхнем положении. При опускании груза барабан 4 вращается, его вращение через вал 3 передается на диски 6. При вращении дисков 6 пале 12,перемещаясь в прорезях 7, увеличивает упругую деформацию пластин чатой пружины 8. Тем самым увеличивается сила давления пружины 8 Fpp (фиг. 4), .действующая на наклонной поверхности спиральной- прорези 7. Уреличикается и сила F ., Fnp,/sin М оторая создает момент М F p/cos екоторое смещение точки приложения np. вверх вносит практически погрешости в наши рассуждения). Но в сответствии с возрастающим моментом озрастает и диаметр свинчивания гибкого органа 5 ка коническом бараане 4. Таким образом достигается равновешивание при любом положении груза. Как уже отмечалось выше, момент, создаваемый на дисках, -М равен (фиг.4) М F pcos/x. Fpippctg/i. так 1 пр./ sin/x, где сила давления пружины Fp|p Fpp Р-К, где К --жесткость пружины. -р Kctoj/t р ctpr/л 4f ), M-Kp|f , йч-, г- f-f..c в последнем выражении, которое является по существу формулой кривой, нарезаемой на дисках 6, М принимается const,т.е. величиной, равной моменту на цилиндрическом барабане (не показан), установленного вместо тонического барабана 4, т.е.Ррр. в таком случае будет на валу 3 создавать всегда постоянный момент. Это дает возможность расширить область применения устройства, доп стим установить диски б на удлиненный вал какого-либо приводного устройства, создавая таким образом приводной комплекс, действующий и как уравновешиватель, и как привод. Устройство (п.З формулы) работает аналогично. Настройка устройства производится перемещением регулируемых упоров 9 и IS по скалкам 16 при помощи болта 17. Пружина 13 аналогично пружине 8 создает момент вра1пения на дисках 6, в результате чего увеличивается грузоподъемность устройства Б два раза.
Таким образом, предлагаемое устройство характеризуется упрощением конструкции за счет отсутствия шариковой передачи; повышением надежности и долговечности устройства/ расширением функциональных возможностей устройства; улучшением силовой схемы онструкции.
Формула изобретения
1.Грузоподъемно-уравновешивающее устройство, содержащее корпус, в котором размещены регулирующий упор, установленная с возможностью вращени ось, на которой жестко посажен барабан для гибкого тягового органа, и пластинчатая пружина, один конец которой жестко прикреплен к регулируемому упору, а другой имеет контактный элемент, взаимодействующий со спиральными направляющими, отличающееся тем, что, с целью упрощения конструкции устройства, оно снабжено жестко закрепленными
на оси дисками, в торце которых выполнены спиральные направляющие.
2.Устройство по п.1, отличающееся тем, что барабан
выполнен коническим, а спираль прорезей выполнена логарифмической.
3. Устройство по п.1, отличающееся тем, что барабан выполнен цилиндрическим, а форма определяется из уравнения
P f I к
где р - переменный радиус кривизны спирали;
W - угол поворота радиуса / ;
С - постоянная, выбираемая из конструктивных соображений,М - момент, создаваемый в дисках
К - жесткость пружины. 4. Устройство по пп. 1-3, отличающееся тем, что,,с целью увеличения грузоподъемности устройства, оно снабжено дополнительной пластинчатой пружиной, а в дисках симметрично основным выполнены аналогичные спиральные прорези, в которые введен контактный элемент дополнительной пружины.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке №3215905, кл. В 66 D 5/18 1980.
. А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное уравновешивающее устройство | 1980 |
|
SU948866A1 |
| Тяговая лебедка | 1987 |
|
SU1523538A1 |
| ВИБРАЦИОННОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СМЕРЗШИХСЯ МАТЕРИАЛОВ | 1991 |
|
RU2036828C1 |
| Устройство для изготовления плоских спиральных пружин | 1977 |
|
SU716682A1 |
| Грузоподъемное уравновешивающее устройство (его варианты) | 1981 |
|
SU992409A1 |
| Балансировочное устройство /его варианты/ | 1980 |
|
SU933630A1 |
| ТОКОСЪЕМНОЕ УСТРОЙСТВО | 1992 |
|
RU2037243C1 |
| Устройство для заполнения наполнителем оболочек группы трубчатых электронагревателей | 1979 |
|
SU864595A1 |
| Грузоподъемное балансировочное устройство | 1980 |
|
SU931692A1 |
| Грузоподъемное уравновешивающее устройство | 1985 |
|
SU1281503A1 |