(S) СПОСОБ НАСТРОЙКИ УСИЛИЯ КОНТАКТНЫХ
ПРУЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОУДАРНЫЙ ИНСТРУМЕНТ С УЛЬТРАЗВУКОВЫМ ВОЗБУЖДЕНИЕМ | 1998 |
|
RU2179919C2 |
| УЛЬТРАЗВУКОВОЙ ВИБРОУДАРНЫЙ ИНСТРУМЕНТ | 2004 |
|
RU2259912C1 |
| ПОВОРОТНО-УДАРНЫЙ МЕХАНИЗМ Б.Н.СТИХАНОВСКОГО (ВАРИАНТЫ) | 1995 |
|
RU2095234C1 |
| ДВУХМАССНЫЙ ВИБРОУДАРНЫЙ ГРОХОТ | 2010 |
|
RU2424067C1 |
| Установка для ультразвуковой микросварки и контроля соединения | 1988 |
|
SU1540986A1 |
| СПОСОБ КОНТАКТНОЙ КОММУТАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2028018C1 |
| НАСТРАИВАЕМОЕ ДЕМПФИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 1996 |
|
RU2127180C1 |
| УЛЬТРАЗВУКОВОЙ ИНСТРУМЕНТ ДЛЯ ДЕФОРМАЦИОННОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ И СВАРНЫХ СОЕДИНЕНИЙ | 2010 |
|
RU2540230C2 |
| ГРАВИРОВАЛЬНЫЙ СТАНОК И ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО | 2011 |
|
RU2495754C2 |
| УЛЬТРАЗВУКОВОЙ ОБРАБАТЫВАЮЩИЙ ИНСТРУМЕНТ ДЛЯ ДЕФОРМАЦИОННОГО УПРОЧНЕНИЯ И РЕЛАКСАЦИОННОЙ ОБРАБОТКИ | 2009 |
|
RU2409461C2 |
1
Изобретение относится к технологии приборостроения и может быть ис пользовано для настройки усилия контактных пружин в механизмах приборов и элементов автоматики.
Известен способ настройки усилия контактных пружин путем гибки упорного элемента до тех п5р, пока контактная пружина не разовьет необходимое усилие, измеряемое силоизмерительным устройством.
Этот способ трудоемок и сложен.
Наиболее близкими по технической сущности к изобретению являются способ настройки усилия контактных пружин и приспособление для проверки и регулировки контактного нажатия, применяемое при регулировке контактного усилия датчиков-реле температуры типа ДРТ.
Контактное усилие получают гибкой упорного элемента методом последовательных приближений с промежуточным контролем усилия с помощью
граммометра, до тех пор, пока усилие контактной пружины, измеряемое граммометром, не достигнет заданного значения 2.
Статический характер воздействия на упорный элемент, применяемый в известном способе, не позволяет контролировать усилие пружины в процессе настройки ввиду значительной погрешности измерения, вызванной упругой деформацией упорного элемен та при снятии силового воздействия на инструмент. Поэтому настройку приходится проводить последовательным нагружением с междуцикловым контролем настраиваемого усилия, что затрудняет автоматизацию настройки и требует длительного времени на операцию.
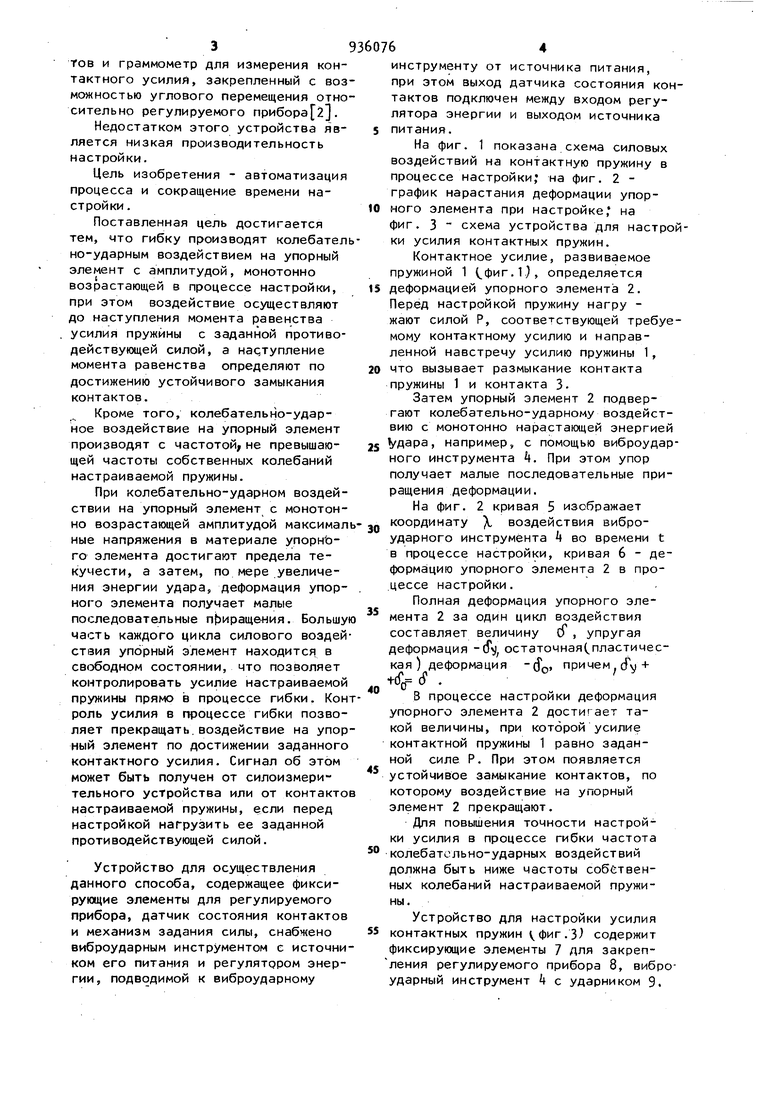
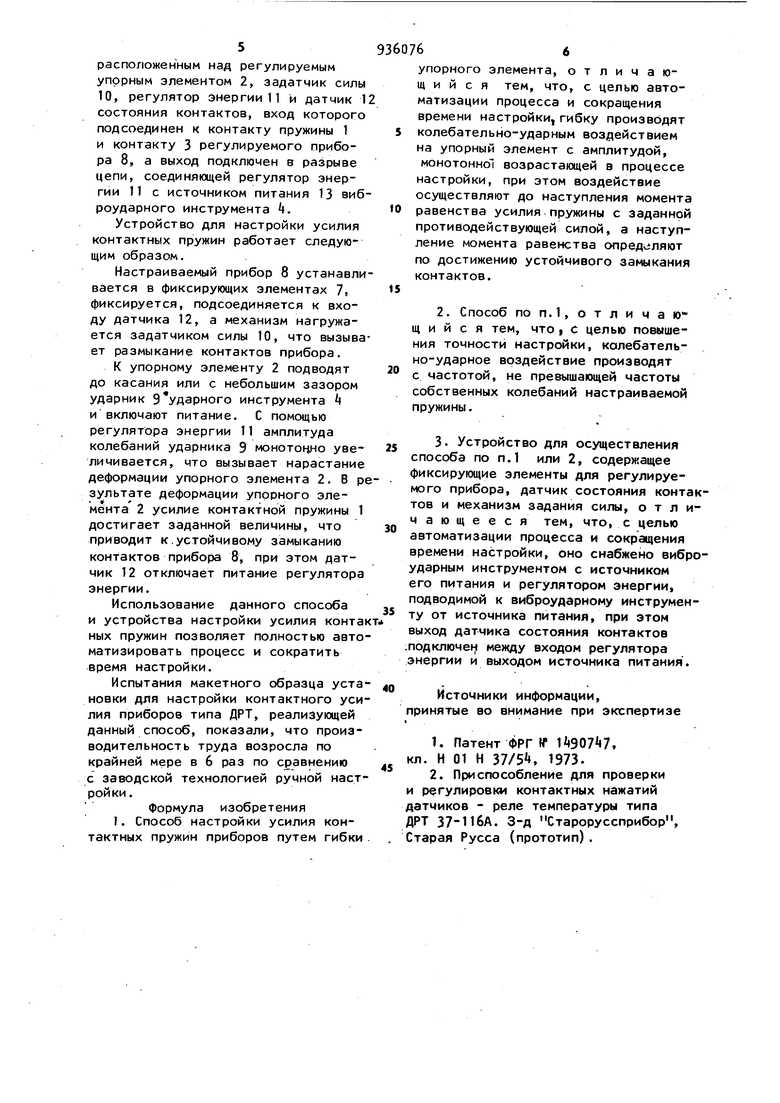
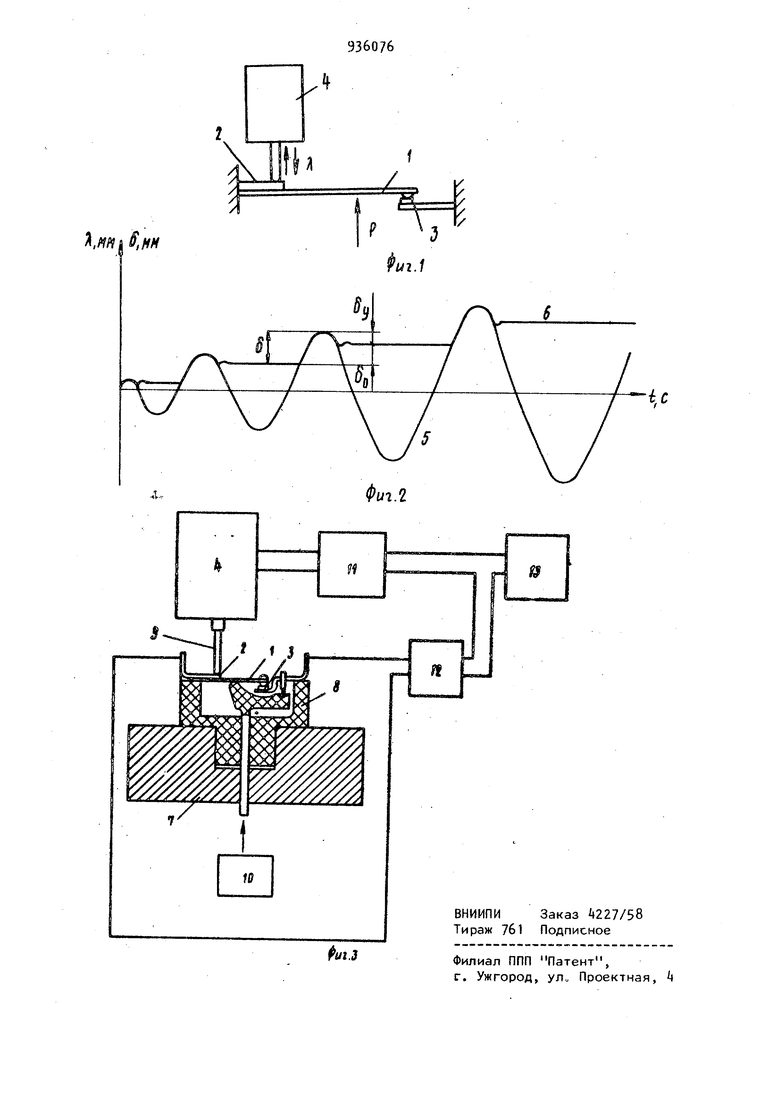
Известное устройство для настройки усилия контактных пружин содержит размещенные на основании фиксирующие элементы для регулируемого прибора, индикатор состояния контак3тов и граммометр для измерения контактного усилия, закрепленный с воз можностью углового перемещения отно сительно регулируемого прибора 2. Недостатком этого устройства является низкая производительность настройки. Цель изобретения - автоматизация процесса и сокращение времени настройки . Поставленная цель достигается тем, что гибку производят колебател но-ударным воздействием на упорный элемент с амплитудой, монотонно возрастающей в процессе настройки, при этом воздействие осуществляют до наступления момента равенства усилия пружины с заданной противодействующей силой, а наступление момента равенства определяют по достижению устойчивого замыкания контактов. Кроме того, колебательно-ударное воздействие на упорный элемент производят с частотой, не превышающей частоты собственных колебаний настраиваемой пружины. При колебательно-ударном воздействии на упорный элемент с монотонно возрастающей амплитудой максимал ные напряжения в материале упорнЪго элемента достигают предела текучести, а затем, по мере увеличения энергии удара, деформация упорного элемента получает малые последовательные пЬиращения. Большу часть каждого цикла силового воздей стаия упорный элемент находится в св(эбодном состоянии, что позволяет контролировать усилие настраиваемой пружины прямо в процессе гибки. Кон роль усилия в процессе гибки позволяет прекращать,воздействие на упор ный элемент по достижении заданного контактного усилия. Сигнал об этом может быть получен от силоизмерительного устройства или от контакто настраиваемой пружины, если перед настройкой нагрузить ее заданной противодействующей силой. Устройство для осуществления данного способа, содержащее фиксирующие элементы для регулируемого прибора, датчик состояния контактов и механизм задания силы, снабжено виброударным инструментом с источни ком его питания и регулятором энергии , подводимой к виброударному 6 инструменту от источника питания, при этом выход датчика состояния контактов подключен между входом регулятора энергии и выходом источника питания. На фиг. 1 показана схема силовых воздействий на контактную пружину в процессе настройки, на фиг. 2 график нарастания деформации упорного элемента при настройке, на фиг. 3 схема устройства для настройки усилия контактных пружин. Контактное усилие, развиваемое пружиной 1 фиг.1.), определяется деформацией упорного элемента 2. Перёд настройкой пружину нагру жают силой Р, соответствующей требуемому контактному усилию и направленной навстречу усилию пружины 1, что вызывает размыкание контакта пружины 1 и контакта 3Затем упорный элемент 2 подвергают колебательно-ударному воздействию с монотонно нарастающей энергией Vflspa, например, с помощью виброударного инструмента k. При этом упор получает малые последовательные приращения деформации. На фиг. 2 кривая 5 изображает координату X воздействия виброударного инструмента во времени t в процессе настройки, кривая 6 - деформацию упорного элемента 2 в про.цессе настройки. Полная деформация упорного элемента 2 за один цикл воздействия составляет величину cf , упругая деформация -f, остаточная(пластическая ) деформация do причем сГ)+ В процессе настройки деформация упорного элемента 2 достигает такой величины, при которой усилие контактной пружины 1 равно заданной силе Р. При этом появляется устойчивое замыкание контактов, по которому воздействие на упорный элемент 2 прекращают. Для повышения точности настройки усилия в процессе гибки частота колебательно-ударных воздействий должна быть ниже частоты собственных колебаний настраиваемой пружины. Устройство для настройки усилия контактных пружин фиг.З содержит фиксирующие элементы 7 для закрепления регулируемого прибора 8, виброударный инструмент 4 с ударником 9.
расположенным над регулируемым упорным элементом 2, задатчик силы 10, регулятор энергии 11 и датчик 12 состояния контактов, вход которого подсоединен к контакту пружины 1 и контакту 3 регулируемого прибора 8, а выход подключен в разрыве цепи, соединяющей регулятор энергии 11 с источником питания 13 виброударного инструмента .
Устройство для настройки усилия контактных пружин работает следующим образом.
Настраиваемый прибор 8 устанавливается в фиксирующих элементах 7, фиксируется, подсоединяется к входу датчика 12, а механизм нагружается задатчиком силы 10, что вызывает размыкание контактов прибора.
К упорному элементу 2 подводят до касания или с небольшим зазором ударник 9ударного инструмента Ц и включают питание. С помощью регулятора энергии 11 амплитуда колебаний ударника 9 моноточно увеличивается, что вызывает нарастание деформации упорного элемента 2, В результате деформации упорного элемента 2 усилие контактной пружины 1 достигает заданной величины, что приводит к.устойчивому замыканию контактов прибора 8, при этом датчик 12 отключает питание регулятора энергии.
Использование данного способа и устройства настройки усилия контак ных пружин позволяет полностью автоматизировать процесс и сократить время настройки.
Испытания макетного образца установки для настройки контактного усилия приборов типа ДРТ, реализующей данный способ, показали, что производительность труда возросла по крайней мере в 6 раз по сравнению с заводской технологией ручной настройки.
формула изобретения I. Способ настройки усилия контактных пружин приборов путем гибки
упорного элемента, отличающийся тем, что, с целью автоматизации процесса и сокращения времени настройки, гибку производят колебательно-ударным воздействием на упорный элемент с амплитудой, монотонноТ возрастающей в процессе настройки, при этом воздействие осуществляют до наступления момента равенства усилия пружины с заданной противодействующей силой, а наступление момента равенства опредс;ляют по достижению устойчивого замыкания контактов.
с частотой, не превышающей частоты собственных колебаний настраиваемой пружины.
его питания и регулятором энергии, подводимой к виброударному инструменту от источника питания, при этом выход датчика состояния контактов .подключef между входом регулятора энергии и выходом источника питания.
Источники информации, принятые во внимание при экспертизе
I
