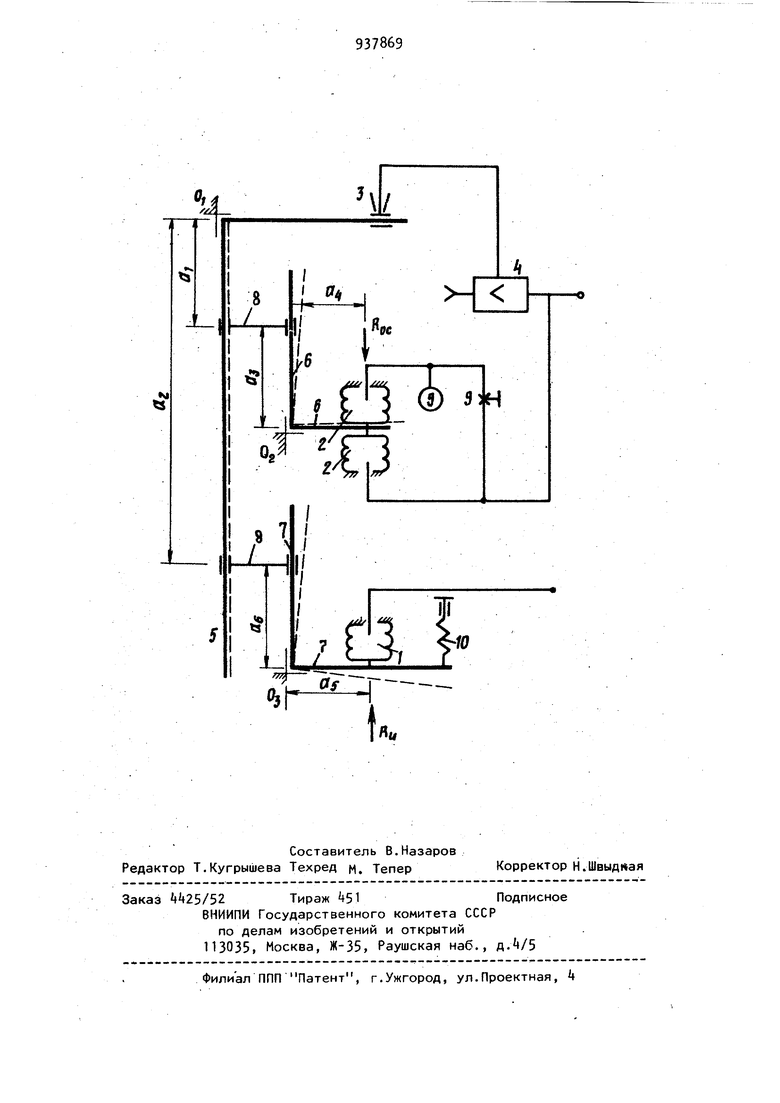
Пружина 10 служит для установки задания . Регулятор работает следующим образом. При увеличении давления Р в изме рителе-сильфоне 1 его усилие оказывается больше усилия пружины 10 и передаточный рычаг 7 поворачивается относительно точки Oj. Через стяжку 8 это перемещение передается на сум мирующий рычаг 5 который поворачивается относительно точки 0. Его перемещение индикатором 3 рассоглас вания преобразуется в давление, которое усиливается усилителем k и по ступает а сильфоны 2 обратной связи усилия которых стремятся повернуть суммирующий рычаг в обратном направ лении. Равновесие наступает при равенстве моментов сил измерителя, о ратной связи и пружины 10 установки задания. Изменение коэффициента уси ления достигается перемещением стяжек 8. Диапазон изменения коэффициента усиления определяется расстояниями 0, О ОзРасчет коэффициента усиления регулятора при условии абсолютно жесткой рычажной системы ведут по формуле, J, ДРо FI аг. N-A%;F; где К. - коэффициент усиления регулятора;дРр - номинальное входное давление ; изменение выходного давления;F F - эффективные площади сильфонов измерителя обратной связи соответственно; а ,а ,а,а-,а а - размеры плеч ры. .. чагов. В реальных регуляторах жесткость рычагов величина конечная. Поэтому под действием сил измерителя и элемента обратной связи рычаги деформируются (изгибаются, показано пунктиром). При этом сильфоны 1 и 2 испытывают растяжение или сжатие и, как -следствие, ьозникают силы упругих реакций. Эти силы, участвуя в силовом суммировании сигналов измерителя и элемента обратной связи, вызывают отклонение действительного значения коэффициента усиления К от величины К. , рассчитанной по формуле (1).Действие силы R направлено встречно действию силы измерителя, а действие R - встречно действию силы элемента обратной связи. Для компенсации действия -силы R необходимо увеличение входного давления, поэтому действие R приводит к уменьшению коэффициента усиления. Аналогично действие Rj. способствует увеличению коэффициента усиления. В зависимости от соотношения сил реакций обще.е изменение коэффициента усиления может быть как положительным, так и отрицательным. Поэтому действительное значение К коэффициента усиления регулятора определяют по формуле К - .,(2) где Кл(- коэффициент жесткости, характеризующий отношение действительного значения К коэффициента усиления от величины К, рассчитанной для случая абсолютно жестких рычагов. Для нахождения коэффициента жесткости К . г последователь но определяют моменты инерции 1, и у жесткости и Ely, суммирующего и передаточных рычагов соответственно, жесткости Су и Сх измерителя сильфона 1 и элемента обратной связи - сильфона 2 и веичину 1, равную К - 1±9г-§ Здесь величины А и В равны соответственноо. А-31 §4..га21 а5(.. «- -. . .г,+ ЗЕ, а2.-6ЕГс В - §--ii2ja.l + а4 а4+а2) ,А) а,,. 6-Е-1с3 1и Очевидно, что расширение диапазона изменения коэффициента усиления егулятора по сравнению с абсолютно естким обеспечивается при выполнении словия К. max 1, 1, де К max - коэффициент жесткости при максимальном коэффициенте усиления; К min - то же при минимальном. зависимость (3) (5) Учитывая лучим ЕI (-.)(7) С- / . . V 6а 2( 1 ) El -El f ifltajilK fUJnagiaff+a, и tc , (K mln-l) Уравнение (7) позволяет выбрать жесткость суммирующего рычага в зависимости от жесткостей С измерителя 1 и С элемента 2 обратной связи и размеров плеч рычагов, а по уравнению (8) выбирают жесткость ЕЭ, передаточных рычагов 8 зависимости от жесткости суммирующего рычага. Максимальное расширение диапазона изменения коэффициента усиления oi- раничено областью упругих деформаций рычагов и сильфонов 1 и 2. Использование предлагаемого способа позволяет повысить точность установки коэффициента усиления и тем самым уменьшить динамическую погрешность, регулятора, а также расширить диапазон изменения коэффициента усиления. 93 по9Формула изобретения Способ изменения коэффициента усиления пневматического рычажного регулятора системы котельной автоматики путем регулирования в зависимости от требуемого значения коэффициента усиления положения стяжек, соединяющих суммирующий рычаг с установленным на его плече индикатором рассогласования с передаточными рычагами с установленным на одном из них измерителем, а на втором - элементом обратной связи, отличающий с я тем, что, с целью увеличения диапазона изменения коэффициеН та усиления и уменьшения динамической погрешности, последовательно определяют модуль упругости, момент инерции и жесткость суммирующего и передаточных рычагов и коэффициент жесткости, в зависимости от которого корректируют положение стяжек, при этом плечо с индикатором рассогласования выполняют разгруженным. Источники информации, принятые во внимание при экспертизе 1. Корнилов Ю.Г. Элементы и системы пневпоавтоматики. Киев, Техника , 1968, c..
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛЯТОР СКОРОСТИ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2084668C1 |
| Устройство для регулирования натяжения длинномерного материала | 1988 |
|
SU1646974A1 |
| Пневматический компенсационный датчик | 1987 |
|
SU1478227A1 |
| Устройство для автоматическогоупРАВлЕНия дВигАТЕлЕМ и бЕССТупЕН-чАТОй ТРАНСМиССиЕй ТРАНСпОРТНОгОСРЕдСТВА | 1976 |
|
SU802098A1 |
| Измеритель давления | 1980 |
|
SU932309A1 |
| Устройство для измерения деформаций конструкций | 1974 |
|
SU533812A1 |
| СПОСОБ РАБОТЫ ТОРМОЗА ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476341C1 |
| Регулятор расхода | 1977 |
|
SU746451A1 |
| Устройство для автоматического управления торможением поезда | 1980 |
|
SU925709A1 |
| ПНЕВМАТИЧЕСКИЙ КОМПЕНСАЦИОННЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МАНОМЕТР | 1967 |
|
SU191853A1 |