1
Изобретение относится к транспортному машиностроению и может быть использовано для автоматизации управления скоростными и нагрузочными режимами работы двигателя и бесступенчатой трансмиссии в условиях как плавных, так и резких изменений тяговой нагрузки и скорости движения транспортного средства.
Известны устройства для автоматического управления двигателем и бесступенчатой трансмиссией транспортного средства, содержащие измеритель нагрузки двигателя, гидроусилитель и два пространственных кулачка, профильные поверхности которых соединены посредством механических или гидравлических связей с рычагами управления регуляторами скорости двигателя и передаточного числа трансмиссии 1 и .
Недостатком этих устройств является невысокая точность измерения регулируемых параметров, характеризующих режимы работы двигателя, что обусловлено косвенным измерением нагрузки (крутящего момента) двигателя по давлению жидкости в бесступенчатой объемной гидропередаче и косвенным измерением угловой скорости вала двигателя -по положению рычага управления регулятором скорости двигателя.
Указанный недостаток частично устранен в устройстве 3, использующем прямое измерение крутящего момента двигателя. В этом устройстве механический измеритель крутящего момента двигателя соединен с золотником гидроусилителя посредством коромысла, второе плечо которого опирается на профильную поверхность дополнительного плоского кулачка, соединенного с рычагом управления регулятором скорости двигателя.
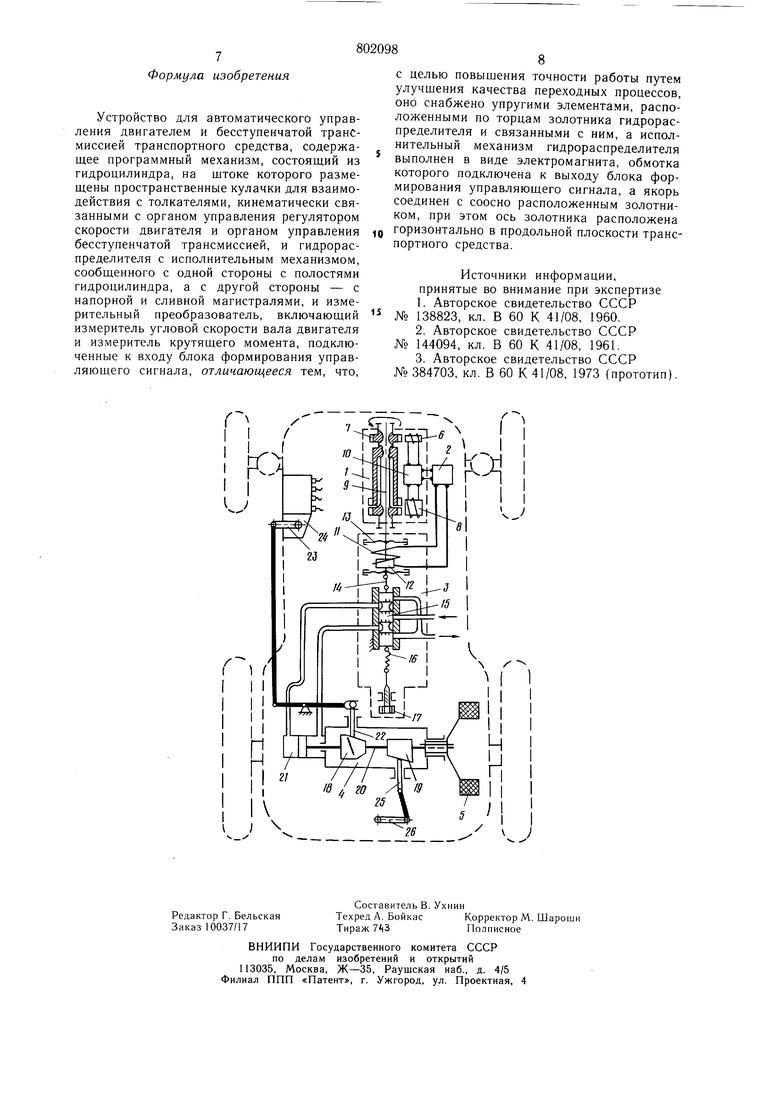
Однако в прототипе измерение угловой скорости вала двигателя, необходимое при формировании статической программы управления с целью получения оптимальных для каждой частичной мощности сочетаний угловой скорости и крутящего момента двигателя, осталось косвенным по положению рычага управления регулятора скорости двигателя. При этом точность формирования статической программы управления (точность статических характеристик устройства получается невысокая. Кроме того, это устройство плохо компонуется на транспортном средстве из-за необходимЬсти соединять механическими связями измеритель крутящего момента и рычаг управления регулятором скорости двигателя с золотником гидроусилителя. Конструктивное выполнение этих связей обычно весьма сложно, так как измеритель крутящего момента и регулятор скорости двигателя размещаются в разных трудно доступных местах транспортного средства. Соответствующие механические связи получаются многозвенными, ухудшают внешний вид машины и снижают ее надежность. Цель изобретения - повышение точности работы путем улучшения качества переходных процессов устройства. Цель достигается тем, что устройство снабжено упругими элементами, расположенными по торцам золотника гидрораспределителя и связанными с ним, а исполнительный .механизм гидрораспределителя выполнен Б виде электромагнита, обмотка которого подключена к выходу блока формирования управляющего сигнала, а якорь соединен с соосно расположенным золотником, при этом ось золотника расположена горизонтально в продольной плоскости транспортного средства. Предложенное взаимное расположение деталей устройства и наличие упругих элементов позволяют подключить к силе электромагнита, действующей на золотник, также силу инерции подвижных масс электрогидравлического преобразователя (якоря, золотнлка и их соединительных деталей), которая пропорциональна производной от скорости движения машины. Введение же в закон регулирования воздействия по производной от регулируемого параметра улучшает, как известно, качество переходных процессов автоматических систем. Но в данном случае введение воздействия по производной имеет существенные отличия от обычно применяемых решений. В частности, введение воздействия по производной достигнуто за счет особого взаимного расположения и подключения деталей без какого-либо изменения их конструкции. Кроме того, в зависимости от условий работы (изменение скорости движения машины происходит по воле водителя, повернувшего органы управления режимами работы машины, или по причине изменения нагрузки машины) меняется знак воздействия по производной что дополнительно улучшает качество работы устройства. На чертеже показана схема устройства, изображенная на фоне контура управляемого транспортного средства (переднему ходу машины соответствует движение ее снизу вверх). Устройство состоит из измерительного преобразователя 1, блока 2 формирования сигнала нагрузки двигателя, электрогидравлического преобразователя 3, программного механизма 4 и педали 5 управления скорос : движения машины. Измерительный преобразователь 1 содержит электрический измеритель угловой скорости вала двигателя, включающий катушку 6 и ротор 7, электрический измеритель крутящего момента двигателя, включающий катушку 8 и торсион 9 с двумя роторами, и устройство 10, суммирующее по определенной программе сигналы обоих измерителей. На выходе устройства 10 поддерживается одно и то же номинальное значение напряжения при работе двигателя на оптимальных (например, по минимуму расхода топлива) сочетаниях угловой скорости вала и крутящего момента двигателя во всем диапазоне мощности от холостого хода до максимальной. Увеличение нагрузки двигателя, приводящее к уменьшению угловой скорости вала и увеличению крутящего момента относительно их оптимальных сочетаний, вызывает уменьшение напряжения измерительного преобразователя и, наоборот, уменьшение нагрузки вызывает рост этого напряжения. В блоке 2 содержатся устройства для выпрямления, термостабилизации и ограничения максимального значения напряжения, поступающего от измерительного преобразователя 1 через блок 2 к электрогидравлическому преобразователю 3. Если мощности сигнала измерительного преобразователя недостаточно для привода электрогидравлического преобразователя, в блоке 2 может производиться усиление этого сигнала. Электрогидравлический преобразователь 3 содержит электромагнит с катушкой 11 и якорем 12, подвешенным на диафрагмах 13 и соединенным посредством звена 14 с золотником 15 гидрораспределителя. Золотник нагружен пружиной 16 растяжения настраиваемой винтом 17. Оси якоря 12 „ золотника 15 параллельны продольной оси машины, а якорь 12 расположен впереди золотника 15 по ходу машины. Электромагнит выполнен втяжным (таким, что при увеличении напряжения якорь 12 втягивается в катушку 11, растягивая пружину 16 и смещая золотник 15 вперед по ходу машины) Программный механизм 4 содержит два пространственных кулачка 18 и 19, установленных на штоке 20 гидроцилиндра 21, подключенного к золотнику 15. Профильная поверхность кулачка 18 посредством толкателя 22 соединена с рычагом 23 управления регулятором 24 скорости двигателя, а профильная поверхность кулачка 19 посредством толкателя 25 соединена с рычагом 26 управления регулятором передаточного числа трансмиссии. Педаль 5 выполнена двуплечей, имеет демпфер, фиксируюший ее в любом заданном водителем положении (на схеме этот демпфер не показан), и соединена со штоком 20 так, что не препятствует его осевому движению. Устройство работает следующим образом Водитель задает желаемую скорость движения транспортного средства, поворачивая педаль 5 и связанный с ней шток 20. При этом кулачки 18 и 19 устанавливают рычаги 23 и 26 в положение, обеспечивающее требуемую скорость движения машины. Сочетание угловой скорости вала двигателя и передаточного числа трансмиссии, поддерживаемое при этом, определяется осевым положением штока 20, которое, в свою очередь, зависит от поступления жидкости к гидроцилиндру 21 через золотник 15. Последний смещается из среднего положения и пропускает жидкость к гидроцилиндру 21, когда напряжение на вы ходе измерительного преобразователя 1 отклоняется от номинального из-за отклонения скоростных и нагрузочных режимов работы двигателя от оптимальных, а также когда изменяется скорость движения транспортного средства.
Если двигатель недогружен, одновременное изменение угловой скорости вала двигателя и передаточного числа трансмиссии происходящее под действием кулачков 18 и 19 при осевом движении штока 20, направлено на парирование изменившейся нагрузки машины при стабилизации скорости движения на уровне заданной. В случае полной нагрузки двигателя ку.лачок 18 воздействует на шток 20 своей цилиндрической поверхностью. Тогда изменений скоростного режима двигателя при любых движениях кулачка 18 не происходит - скоростной режим удерживается максимальный. Выполняемое при этом кулачком 19 изменение передаточного числа трансмиссии направлено на стабилизацию нагрузки двигателя, а скорость движения машины изменяется обратно пропорционально нагрузке машины, оставаясь меньше заданной.
Воздействие на золотник силы, пропорциональной производной от скорости движения машины, проявляется двояко.
При изменении скорости движения машины по воле водителя, изменившего, например передаточное число трансмиссии, сила инерции подвижных масс электрогидравлического преобразователя действует в ту же сторону, что и сила электромагнита, реагирующая на изменение нагрузки двигателя. Так, при разгоне машины золотник под действием силы инерции смещается назад по ходу машины. Увеличение крутящего момента и уменьшение угловой скорости вала двигателя, вызванные разгоном, снижают, как было указано выше, напряжение измерительного преобразователя 1. Сила электромагнита уменьшается и золотник под действием пружины 16 также смещается назад. Суммирование воздействия сил инерции и электромагнита способствует увеличению смещения золотника из среднего положения, что приводит к увеличению быстродействия устройства. В данном режиме движения это весьма полезно, так как именно водитель, поворачивающий рывком органы управления режимами работы машины, может вызвать наиболее резкие изменения нагрузки двигателя, и для их четкого парирования требуется повышенное быстродействие устройства немедленно после появления возмущения. При изменении скорости движения машины вследствие изменения сопротивления движению машины сила инерции подвижных частей электрогидравлического преобразователя действует навстречу изменениям силы электромагнита, вызванным изменением нагрузки двигателя. В самом деЛе, увеличение сопротивления движению машины вызывает падение скорости движения машины и золотник под действием силы инерции движется вперед. Увеличение же нагрузки двигателя приводит, как было показано выше, к движению золотника назад. Вычитание воздействия силы инерции из силы электромагнита способствует в этом режиме движения снижению чувствительности устройства к толчкам и пульсациям нагрузки, которые должны преодолеваться за счет инерции
0 всей машины. Получаюшееся при этом снижение быстродействия устройства способствует уменьшению перерегулирований и улучшению качества переходных процессов автоматической системы.
Если расположить якорь электромагнита позади золотника (такое расположение деталей получается при повороте электрогидравлического преобразователя на 180°), суммирование сил инерции и электромагнита
0 будет происходить с обратным знаком. Тогда воздействие по производной будет ухудшать качество переходных процессов. Поэтому указанное взаимное расположение якоря и золотника имеет принципиальное значение.
Степень воздействия по производной изменяется путем изменения масс подвижных частей электрогидравлического преобразователя 3 (якоря 12, золотника 15 и их соединительных деталей), а также изменением
0 суммарной жесткости диафрагм 13 и пружины 16.
Вследствие наличия стабилизирующего воздействия по производной от скорости движения мащины применение данного устройства наиболее эффективно на машинах,
подверженных частым резким изменениям тяговой нагрузки и скорости движения.
Другим примером выполнения электрогидравлического преобразователя является применение иной формы выполнения конструктивных элементов: выталкивающего электромагнита (в таком электромагните при увеличении напряжения якорь 12 выталкивается из катушки 11) и пружины 16 сжатия. При этом якорь 12 должен быть расположен сзади золотника 15 по ходу машины. Однако такое выполнение электрогидравлического преобразователя менее предпочтительно вследствие большей сложности выталкивающего электромагнита.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией транспортного средства | 1976 |
|
SU763161A1 |
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией самоходной машины | 1985 |
|
SU1350048A1 |
| Трансмиссия транспортного средства | 1986 |
|
SU1414670A1 |
| Устройство для автоматического управления двигателем и бесступенчатой трансмиссией самоходной машины | 1984 |
|
SU1191326A1 |
| СИСТЕМА БЕЗУДАРНОГО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2004 |
|
RU2269709C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| РЕГУЛЯТОР СКОРОСТИ ТРАНСПОРТНОЙ МАШИНЫ | 1991 |
|
RU2027615C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДВУХДИАПАЗОННОЙ КОРОБКОЙ ПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2424927C1 |
| Силовая установка транспортного средства | 1983 |
|
SU1138573A1 |
