;54) РЕГУЛЯТОР РАСХОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор расхода газа с ограничителемАбСОлюТНОгО дАВлЕНия | 1978 |
|
SU802936A2 |
| Регулятор расхода воздуха | 1982 |
|
SU1019404A1 |
| Регулятор расхода воздуха | 1982 |
|
SU1016774A1 |
| Регулятор расхода газа с ограничителем абсолютного давления | 1972 |
|
SU456259A1 |
| Регулятор расхода | 1982 |
|
SU1043604A1 |
| Регулятор расхода газа | 1979 |
|
SU798743A1 |
| Регулятор расхода воздуха | 1982 |
|
SU1035572A1 |
| Регулятор массового расхода газа | 1976 |
|
SU737924A1 |
| РЕГУЛЯТОР РАСХОДА | 1973 |
|
SU394759A1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ТУРБОХОЛОДИЛЬНИКОВ | 1964 |
|
SU163902A1 |
Изобретение относится к регулято рам расхода газа в системах кондиционирования воздуха.
Известен регулятор ,содержащий исполнительный механизм, командный прибор и датчик расхода 1 . По сигналам датчика расхода ко1-1андный прибор формирует сигнал для исполнительного механизма, который регулирует количество проходящего воздуха. В качестве датчика расхода использована трубка Вентури, которая выдает на командный прибор при постоянном расходе И TeiJinepaType пневматические сигналы, связь между которыми описывается уравнением
лР(Р2 +АЛР)
const
где дР - перепад давлений между узкой И ШИРОКОЙ частью трубки Вентурй, давление в широкой части
PI Р„ трубки Вентури, давление в узкой части трубки Вентури, А - ПОСТОЯННЫЙ коэффициент. Это соотношение описывается криволинейной зависимостью.
В качестве командного прибора использован множительный сильфонномейбранный механизм, который вьвдает сигнал, пропорциональный соотношению
(2)
т.е. характеристика командного прибора описывается линейной зависимостью. Такое несовпадение характе ристик сигналов датчика расхода . И командного прибора значительно снижает качество и точность процесса регулирования.
15 Для устранения этого недостатка применяются различные конструктивные изменения в командных приборах, чтобы приблизить его характеристику к характеристике датчика.
20 Наиболее близким по технической сущности к изобретению является регулятор расхода, содержащий датчик расхода, выполненный в виде сужающего устройства, соединенного с
25 командным прибором с герметизированным И негерметйзированньлм чувствительными элементами, связанными с плечами контактного рычага, И исполнительный механизм 2 . В
30 регуляторе применен командный при бор с блоком переменной жесткости, который имеет ломаную характеристику, состоящую из нескольких прямых линий (по числу используемых в блоке пружин).
Однако такой командный прибор сложен и также не обеспечивает полного совпадения характеристик.
Целью изобретения является повышение точности работы регулятора.
Поставленная цель достигается тем, что в предложенный регулятор введены два постоянных магнита, первый из которых установлен на подвижном основании герметизированного чувствительного элемента, а второй - на плече контактного рычага против первого постоянного магнита.
В этом случае характеристика командного прибора имеет криволинейный характер, приближающийся к характеристике датчика, поскольку сила взаимодействия между полюсами двух постоянных магнитов обратно пропорциональна квадрату расстояния между ними.
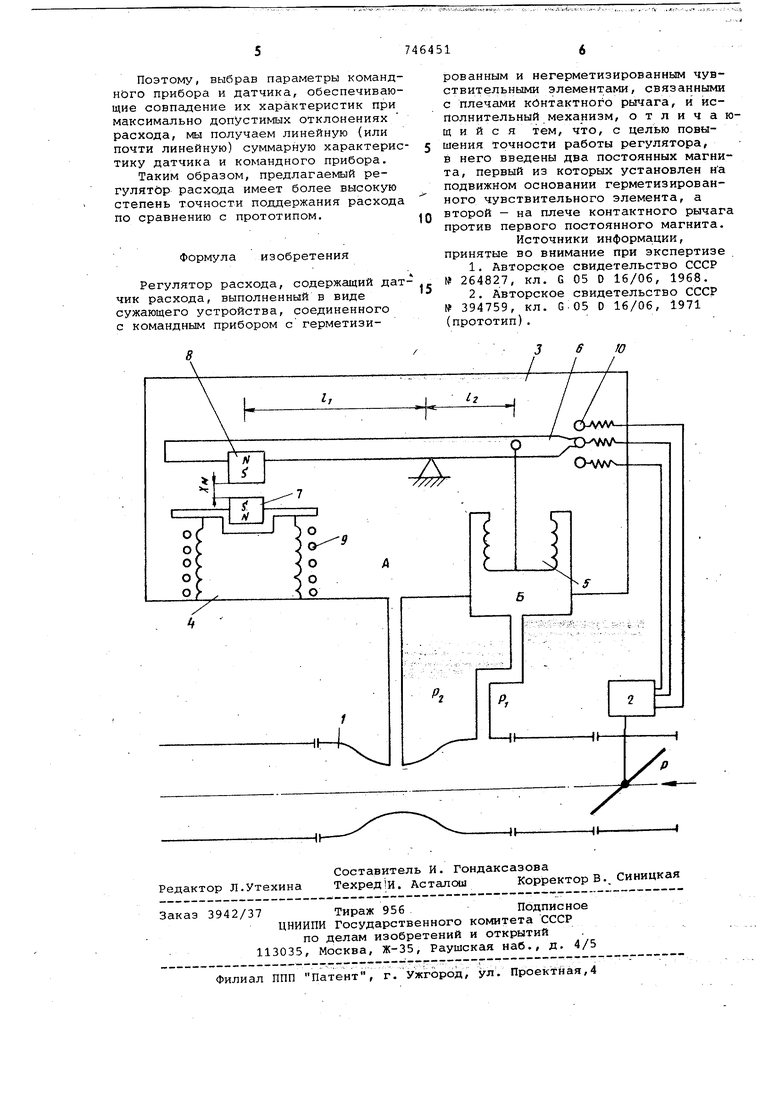
Предлагаемый регулятор показан на чертеже.
Регулятор расхода состоит из датчика расхода 1, выполненного в виде сужающего устройства, исполнительного механизма 2 и крмандного прибора 3, включающего герметизированный 4 и негёзрметйзйрованный 5 чувствительные элементы (сильфоны),связанные с контактным рычагом 6.
На подвижном основании элемента 4 установлен первый постоянный магнит 7, против которого на рычаге 6 установлен второй постоянный магнит 8.Рычаг 6 может замыкать контакты, 10, управляющие исполнительным механизмом 2.
Регулятор расхода работает следующим образом.
При изменении расхода от датчика расхода 1 в полости А и Б командного прибора 3 поступают пневматические сигналы: Р из широкой части сужающего устройства и Р из узкой. При заданном расходе сумма сил,действующих на рычаг б, равна нулю, и он находится в среднем положении, не замыкая контактов 10, связанных с исполнительным механизмом.2.
При изменении расхода, например увеличении за счет увеличения давления Р, на датчике расхода увеличивается перепад давления (Р -Р,),изменяется величина прЬизведения Р (R, -Pg ) , и сильфоны4 и 5,воспринимающие воЗдейсТйИё 6т перепада давлений (R, -Р ) и давления Р, , воздействуют на рычаг б, который, преодолевая усйл ия 2твз аимодействия магни тов 7 и 8, ШШШёч контакт 10, 1ШдаШЙйг нал;Ш э |5У испол ™ ШетШ:ьш5го механизма2.
, . Механизм перекрывает проходное сечение трубопровода, давление Р падает, восстанавливается произведение Р (Pi-P2.)f рычаг б возвраща- . ется в нейтральное положение, и 5 восстанавливается номинальный расходе
Условие равновесного состояния командного прибора в момент разомкнутого положения контактов 10 описывается следующим уравнением:
а) уравнение равновесия рычага 6:
(ДРРд
R; -е, , (3)
г б) уравнение равновесия сильфонного узла 4:
+ Кл
а
Р Р. - Р.
эффективная площадь cильфo a 4, эффективная площадь сильфона 5, упругая реакция сильфона 4,
упругая реакция сильфона 5,
RE
реакция постоянных магнитов 7 и 8, реакция пружины 9.,.
Взаимодействие между магнитами
7 и в общем случае определяется как
р -р м
Г5)
)
м
5 где Х| - расстояние между магнитами К - постоянный коэффициент, зависящий от формы магнита, остаточной индукции и запасенной магнитной энергии. Продифференцировав уравнения (3) 4) и ( 5) и решая их совместно (принимая Rj О) , получим обобщенное уравнение равновесного состояния командного прибора
ЛР(Р2,+ Б AP-D} Const, /6)
L-.i2
где
ffr
-1
4 5
где Р„„ , РО - началь.ные параметры, Сд - жесткость сильфона 4, C(j - жесткость пружины 9.
Анализ уравнений (1) и (2) показывает, что эти уравнения второго порядка представляют собой гиперболические зат-лсимости, параметры которых завися от постоянных коэффициентов, входящих в эти уравнения.
Следовательно, варьируя коэффициентами, входящими в уравнение (6), можно получить характеристику командного прибора, максимально совпадающую с характеристикой датчика.
