(5Ю УСТРОПСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМИ ТОРМОЗАМИ ПОЕЗДА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540212C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Устройство для автоматического управления торможением поезда | 1977 |
|
SU658017A1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМИ ТОРМОЗАМИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2715915C2 |
| СИСТЕМА ПЕРЕДАЧИ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ ОТ ПОСТОВОЙ АППАРАТУРЫ В БОРТОВЫЕ УСТРОЙСТВА БЕЗОПАСНОСТИ | 2015 |
|
RU2582323C1 |
| СИСТЕМА ПЕРЕДАЧИ ОТВЕТСТВЕННОЙ ИНФОРМАЦИИ О МАРШРУТАХ ПРИЕМА/ОТПРАВЛЕНИЯ И КОДАХ АЛС | 2015 |
|
RU2601085C1 |
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА ИЛИ ЛОКОМОТИВА С ПРИБЫВАЮЩИМ ИЛИ ОТПРАВЛЯЮЩИМСЯ СО СТАНЦИИ ПОЕЗДОМ | 2004 |
|
RU2288856C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
1
Изобретение относится к железнодорожному транспорту и касается автоматизации управления подвижным составом.
Известно устройство для автоматического управления тормоыением поезда, содержащее расположенную в начале блок-участка передающую антенну, соединенную с генератором, и расположенные на локомотиве приемную антенну, соединенную с блоком приема ин(1юрмации, датчик, установленный на буксе колеса и соединенный со входами измерителя пути и измерителя скорости, блок программной скорости, один вход которого соединен с выходом измерителя пути, а второй - с выходом блока приема информации, операционный усилитель с регулируемым коэффициентом усиления, соединенный тремя.входами с выходами соответственно датчика давления в тормозной магистрали, измеритель скорости, блоки программной скорости, а выходом - с трехпозиционным релейным элементом, подключенным к вентилям торможения и отпуска тормозной системы поезда, с которыми соединен вход датчика давления в тормозной магистрали, регулятор коэффициента усиления, включенный в обратную связь операционного усилителя и соединенный с измерителем пути и блоком программной скороети 1 .
Недостатком известного устройства является то, что точность автоматического регулирования скорости невысокая и определяется главным образом величиной отключения тормозной силы от расчетного значения, постоянной времени изменения тормозной силы изменениям массы поезда,которые имеют значительные отклонения в процессе эксплуатации, особенно грузовых поездов, что снижает точность остановки.
Цель изобретения - повышение точности остановки.
Поставленная цель достигается тем, что устройство снабжено измерителем эффективности тормозов.и измерителем ускорения, вход которого соединен с выходом измерителя скорости, а выход - с четвертым входом операционного усилителя и с одним входом измерителя эффективности тормозов , второй вход которого соединен с выходом датчика давления в тормозной магистрали, третий вход - с выходом измерителя скорости, а выход с третьим входом блока программной скорости.
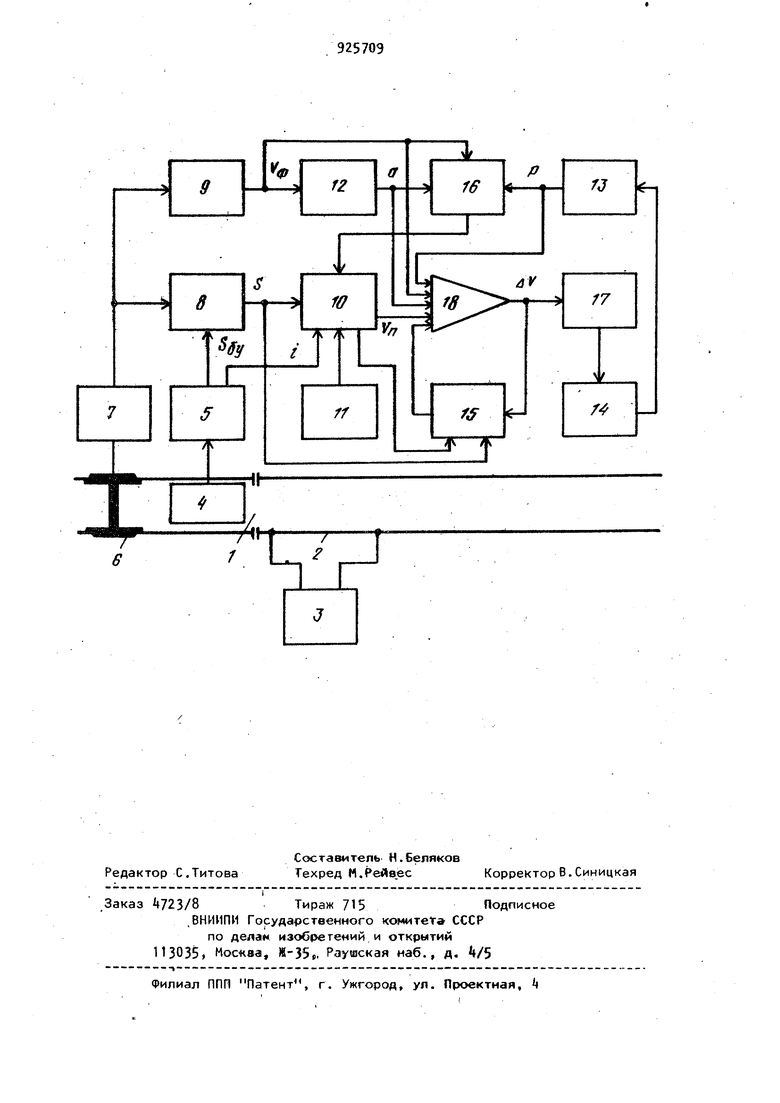
На чертеже представлена блок-схет ма устройства для автоматического управления торможением поезда.
Устройство для автоматического управления торможением,поезда содержит расположенную в начале блокучастка 1 передающую антенну 2, к которой подключен генератор 3, а на локомотиве - приемную антенну 4, соединенную с блоком 5 приема информации. На буксе колеса 6 расположен датчик 7, соединенный с измерителем пути 8 и измерителем скорости 9. Один из входов блока 10 программной скорости соединен с выходом блока 5 приема информации, другой вход - с выходом автоматической локомотивной сигнализации 11.
Измеритель ускорения 12 подключен входом к выходу измерителя скорости 9. Датчик 13 давления в тормозной магистрали подключен к вентилям торможения и отпуска тормозной системы 14. Регулятор 15 коэффициента усиления операционного усилителя управляется от измерителя пути 8 и блока 10 программной скорости.. На входы измерителя эффективности тормозов 16 подключены выходы измерителей скорости 9 и ускорения 12, датчика давления 13. Трехпозиционный релейный элемент 17, соединенный с выходом операционного усилителя 18, подключен к вентилям торможения и отпуска тормозной системы поезда Н.
Входы операционного .усилителя 18 соединены с измерителем скорости 9, блоком 10 программной скорости, регулятором 15 коэффициента усиления операционного усилителя.
За один оборот колеса 6 датчик 7 вырабатывает m прямоугольных импульсов.. Измеритель скорости 9 осуществляет линейное преобразование частоты импульсов с выхода датчика 7 в напряжение постоянного тока, пропорциональное фактической скорости движения поезда Уф. Измеритель пути 8 содержит суммирующий и вычитающий двоичные триггерные счетчики, которые в режиме приема информации производят суммирование импульсов датчика 7, а при движении поезда по блок-участку - вычитание этих импульсов с делением на коэффициент, равный отношению длины блок-участка 1 к длине передающей антенны 2.Передача информации с пути на локомотив о длине блок-участка 1 и профиле на нем осуществляется за время проследования приемной антенной i зоны действия передающей антенны 2.
В этом случае на выходе блока 5 приема информации появляется сигнал, под воздействием которого в суммирующий счетчик измерителя пути 8 поступают импульсы от датчика 1.
Величина профиля запоминается в блоке приема информации 5 на время движения поезда по блок-участку 1 и изменяется у следующего светофора. После выхода приемной антенны из зоны действия передающей антенны 2 в суммирующем счетчике измерителя пути 8 зафиксируется число импульсов датчика 7 пропорциональное расстоянию до конца бпок-участка 1, которые переписываются а вычитающий
счетчик измерителя пути 8. При движении поезда по блок-участку 1 импульсы от датчика 7 поступают в вычитающий счетчик через счетчик-делитель измерителя, пути 8 с К9эффициентом деления, равным отношению длины блок-участка 1 к длине передающей антенны 2, и текущее значение двоичного кода на выходе измерителя пути В пропорционально расстоянию
4о конца блок-участка 1.
Воспроизведение программных кривых движения поезда осуществляется пропорциональной величиной напряжения постоянного тока на выходе блоКб 10 программной скорости в зависимости от показаний автоматической локомотивной сигнализации 11, расстояния S до конца блок-участка 1 , представ.ленного двоичным кодом на
выходе измерителя пути 8, профиля на блок-участке i, передаваемого с пути и представленного двоичным кодом на выходе блока 5 приема информации, действительного значения тормозного коэффициента ll а с выхода измерителя эффективности тормозов 16. Величина тормозного коэффициент измеряется при пробе тормозов на эффективность и автоматически корректируется при следующих регулировочных торможениях. V (S,i,AJlC) О) Выходное напряжение U goneрацион ного усилителя 18 пропорционально сумме напряжений блока 10 программной скорости, датчика давления 3, измерителя 12 ускорения поезда с вычитанием напряжения измерителя скорости 9. -reWV.. W С где К - коэффициент усиления опера ционного усилителя 18, К - коэффициент чувствительнос ти датчика давления 13, К - передаточный коэффициент - измерителя ускорения 12, KQ - передаточный коэффициент измерителя скорости, а - ускорение поезда, Р - давление воздуха в тормозной системе. . Трехпозиционный релейный элемент 17 имеет пороги чувствительности В/, Вл и, управляя работой вентилей торможения и отпуска, в зависимости от величины напряжения реализует следующие режимы торможения: В - торможение Б и В - перекрыша тормозов; и 7 В - отпуск тор мозов. Использование устройства для автоматического управления торможением поезда при движении по сигнала интервального регулирования, требую щим ограничения скорости или остано ки поезда, позволяет повысить безопасность движения поездов за счет предупреждения проездов запрещающих сигналов и превышения допускаемых скоростей движения, увеличить точность автоматического регулирования скорости и остановки поезда за счет измерения эффективности тормозных средств поезда, формирования прорра мной скорости в зависимости от фактической эффективности тормозных средств, профиля на блок-участке и реализации оптимальных ступеней торможений. Использование устройства в автоматизированных системах управления движением пригородных поездов для автоматического.тооможения у пассажирских платформ повышает точность остановки при значительных колебаниях массы поезда, обусловленных изменением населенности поезда. Формула изобретения Устройство для автоматического управления торможением поезда, содержащее расположенную в начале блок-участка передающую антенну, соединенную с генератором, и расположенные на локомотиве приемную антенну, соединенную с блоком приема информации, датчик, установленный на буксе колеса и соединенный со входами измерителя пути и измерителя скорости, блок программной скорости, один вход которого соединен с выходом измерителя пути, а второй - с выходом . блока приема информации, операционный усилитель с р егулируемым коэффициентом усиления, соединенный тремя входами с выходами соответственно датчика давления в тормозной магистрали, измеритель скорости, блоки программной скорости, а выходом - с трехпозиционным релейным элементом,., подкпюцбнным к вентилям торможения и отпуска тормозной системы поезда, с которыми соединен вход датчика давления в тормозной магистрали, регулятор коэффициента усиления, включенный в обГратную связь операционного усилителя и соединенный с Измерителем пути и блоком программной скорости, отличающеес я тем, что, с целью повышения точности остановки, оно снабжено измерителем эффективности тормозов и измерителем ускорения, вход которого соединен с выходом измерителя скорости, а выход - с четвертым входом операционного усилителя и с одним входом измерителя эффективности тормозов, второй вход которого соединен с выходом датчика давления в тормозной магистрали, третий вход - с выходом измерителя скорости, а выход - с третьим входом блока программной скорости. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №658017, кл. В 60 Т 8/00 (прототип).
