. 1
Изобретение относится к области автоматики и измерительной техники и предназначено для использования преимущественно в системах для прочностных усталостных испытаний авиационных конструкций. Оно может быть использовано также в различных об- . ластях экспериментальной техники, где испытываемый объект подвергается циклическому воздействию по какому- ю либо механическому параметру Ссила, давление, деформация, перемещение, скорость, ускорение и т,д.) по заданной программе испытаний.
Известно устройство для управле- is ния циклическим нагружением при прочностных испытаниях 1.
Недостатком этого устройстве является зависимость точности воспроизведения фактических экстремальных 20 значений параметра нагруженйя от динамических характеристик следующей системы, что снижает его точность и надежность.
Наиболее близким к предлагаемому по техническому решению является устройство для управления циклическим нагружением при прочностных испытаниях, содержащее программный задатчик, датчик нагрузки, подключенный к входу устройства, и включенные последовательно интерполятор и следящий исполнительный блок, соединенный с выходом устройства fij.
Недостатком такого устройства является невысокая точность, обусловленная зависимостью экстремальных значений воспроизводимого параметра нагруженйя, например силы от динамических характеристик следящей системы.
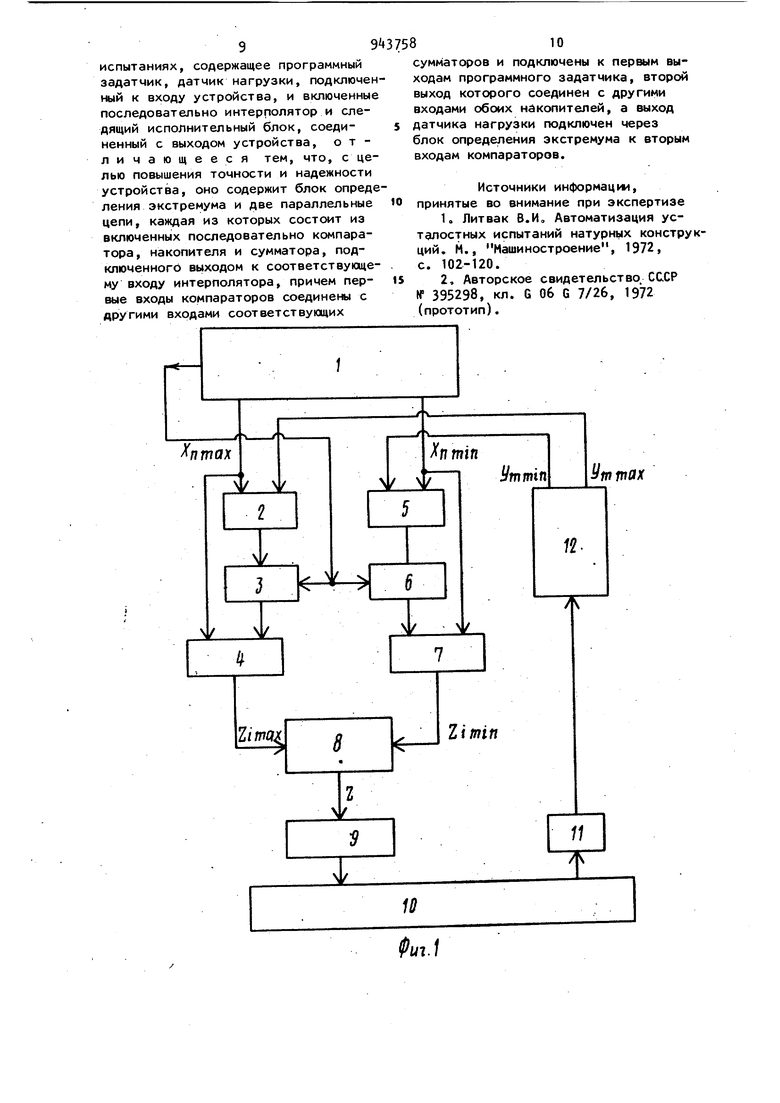
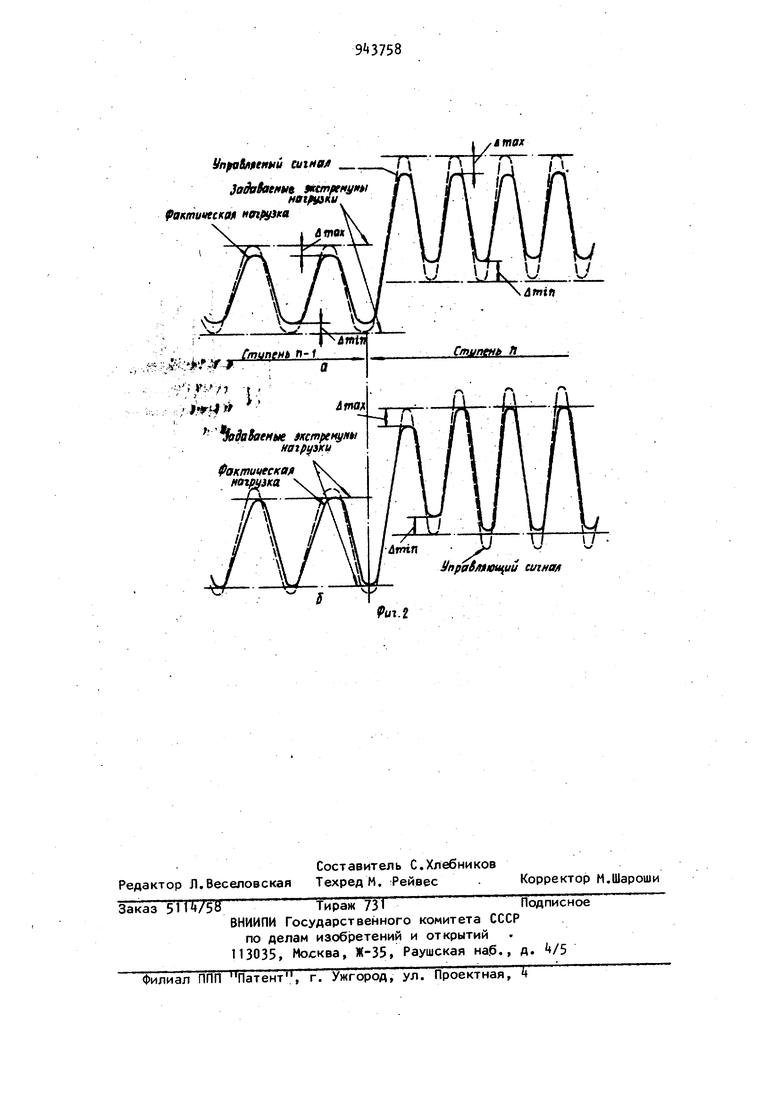
Слядящая система осуществляет нагружение испытываемой конструкции в соответствии с величиной управляющего сигнала. Однако вследствие инерционности следящей системы возникают ошибки воспроизведения экстремальных значений нагрузки и фазовое запазды39вание при воспроизведении заданного закона нагружений. Эти ошибки возрастают с увеличением частоты нагружения. При ресурсных испытаниях достоверность результатов испытаний определяется точностью воспроизведения экстремальных значений нагрузки на каждой ступени программы и не зависит от отставания по фазе. С целью повышения точности ограничивают частоту нагружения или повышают быстродействие следящей системы. Уменьшение частоты нагружения приводит к увеличению продолжительности испытаний В ряде случаев испытание необходимо проводить в области высоких частот для определения динамических характеристик испытываемой конструкции, где не обеспечивается заданная точность нагружения. Быстродействие следящей системы ограничено техничес кими возможностями. Современные быст родействующие электрогидравлические . следящие системы обеспечивают точность воспроизведения экстремальных значений нагрузки 1 в диапазоне частот не выше 2-3 Гц. Цель изобретения - повышение точности, и надежности устройства при воспроизведении экстремальных значений параметра нагружения и расширения частотного диапазона при програм мных циклических испытаниях конструк ций п/тем обеспечения независимости точности воспроизведения от динамических характеристик следящей систе мы. Поставленная цель достигается тем что в устройство для управления циклическим нагружением при прочностных испытаниях, содержащее программный задатчик, датчик нагрузки, подключенный к входу устройства, и включенные последовательно интерполя тор и следящий исполнительный блок, соединенный с выходом устройствавведены блок определения экстремума и две параллельные цепи, каждая из которых состоит из включенных последовательно компаратора, накопителя и сумматора, подключенного выходом к соответствующему входу интерполятора, причем первые входы компараторов соединены с другими входами соответствующих сумматоров и подключены к первым выходам программного задатчика, второй выход которого соединен с другими входами обоих накопителей а выход датчика нагрузки подкпючел через блок определения экстремума к вторым входам компараторов. При этом максимальные и минимальные значения управляющего сигнала на входе в следящую систему формируются по следующей зависимости: Z--X -ьГСХи-У), где Z соответствующее экстремальное значение управляющего сигнала; задаваемое на каждой ступени програмкв, экстремальное значение параметра нагружения i фактическое экстремальное значение параметра нагружения, измеренное вт-ом цикле .ступени программы. При переходе к новой ступени программы производят сброс суммы разностей, определенных в циклах предыдущей ступени. На фиг. 1 представлена блок-схема устройства; на фиг. 2 - графики изменения управляющего сигнала при переходе с одной ступени на другую при способе автоматического управления, реализуемом известным С а ) и описываемым (б) устройствами. Устройство содержит программный задатчик (блок задания ступеней нагружения 1, имеющий три выхода: выходы максимального (Х„, и минимального (, значений ступени нагружения и выход сигнала окончания ступени. Выходы экстремальных значений ступени блока 1 подключены соответственно к входам параллельных цепей коррекции максимумов и минимумов, состоящих соответственно из последовательно соединенных компаратора (блока сравнения) 2 максимумов, накопителя 3 разности максимумов и сумматора k, последовательно .соединенных компаратора (блока сравнения) 5 минимумов, накопителя 6 разности минимумов и сумматоРа 7. Выходы максимального и минимального значений ступени блока задания ступени нагружения 1 подключены квторым входам сумматоров t и 7 соответствующих цепей коррекции максимумов и минимумов, а выход окончания ступени блока 1 подключен к управляемому входу сброса накопителей 3 и 6, Выходы сумматоров 4 и 7 соединены с входом интерполятора 8, выход которого, являясь выходом все го программно-задающего устройства, подключен к входу следящей системы 9, выходной орган которой соединен с испытываемой конструкцией 10. Выход датчика параметра нагружения 11 подключен к входу блока определения экстремума Сэкстрематора 12. выходы максимума и минимума которого соединены с вторыми входами блоков сравнения 2 и 5 соответствующих цепей коррекции. Устройство работает следующим об разом. При автоматическом отслеживании многоступенчатых программ нагружения экстрематор 12 измеряет максимальные и минимальные значения пара метра нагружения в каждом цикле и передает измеренные значения ; экстремумов на первые входы блоков сравнения 2 и 5 цепей коррекции максимума и минимума. Блоки сравнения 2 и 5 сравнивают фактические значения экстремумов с заданными значениями экстремумов, которые поступаю на вторые входы блоков сравнения 2 и 5 от соответствующих выходов (ишощИ Mwiv) блока задания ступеней нагружения 1. Вычисленные разности одноименных заданных и фактических значений максимумов и минимумов с выхода блоков 2 и 5 посту пают на соответствующие накопители разностей 3 и 6, где и происходит их накопление в течение каждой стут пени нагружения. Далее накопленные разности максимума и минимума посту пают на входы сумматоров и 7, где они суммируются с одноименными значениями заданных экстремумов, посту пающих на другие входы сумматоров i и 7 от выходов «лока 1. Сигналы, равные сумме заданных значений экстремумов и накопленных разностей, от блоков и 7 поступаю ч на входы интерполятора 8, на выходе которого формируется функция заданного вида между уже скорректированными экстремальными значениями упрабляющего сигнала. Выход интерпрля тора 8, являясь выходом программнозадающего устройства, соединен с вх дом следящей системы 9. По окончании каждой, ступени нагружения произ водится сброс накопленных разностей а накопителях 3 и 6 по сигналу Сброс, приходящему от блока 1. Описанный процесс иллюстрируетя фиг. 26. В каждом -ом цикле нагружения ледящая система воспроизводит экстреумы параметра нагружения с ошибками iwax iifmax Yt ax д. . - Z. . -Y- -(1 1У1П1И Чпии, зависящими от ее динамических характеристик и пропорциональными экстремальным значениям управляющего сигнала:iway i iwiax (.imin где К и К,«1, В первом цикле И-ой ступени программы (накопители 3 и 6 обнулены) экстремальные значения управляющего сигнала равны их программным значениям, т.е. -т-Ч iwax wrwoiK iwiiw Это приводит к тому, что а первом цикле ошибки воспрсм з-ведения экстремумов-IWIQK /С- V-V iwivx wniiy -iwin равны ошибкам следящей системы, т.е. -ihKjxNvYKSx irmn iwin (S) °Нуиах 1 11гиах ип1ак ... (f V 7- k V J 1 will 2.1 mitt а иМ1и i Во втором цикле нагружения экстремальные значения управляющего сигнала формируются по следующей зависимостиiLwax Итак 7- л.г 2упли -««ИИ Пс дставпйя в выражение (7) значения (Г из выражения С5), получаем значения скорректированных во втором цикле экстремумов управляющего сигнала: ivnw hmiM .7 . Следовательно, фактические зна ния экстремумов нагрузки во вт цикле (с учетом ошибки следяще системы) равны: ivtiQx 2.v«ax awax /Lvnax .wax X- 7А iwiv ivfl-ivi 1.. ,. с учетом ( 8 ) выражение Э) приводи ся к виду wax ум1и Величины ошибок в врспроизвведении экстремальных значений парамет ра нагружения во втором цикле составят:d к-V-г-К х avnax away. % imw , l- VivniviJ т.е. на порядок меньше по сравнени с ошибками в первом цикле нагружения. Практически уже во втором цик ле ступени фа ти еские зйачения . экстремумов параметра нагружёнИй скоррё стированы до задаваемых знач нии nmiv.; есЛЙ ошибка следящей системы стетавляла 5%, то ошибка в воспроизведении экстремумов во втором цикле состав 0,25. В третьем цикле нагружения имее - / ЪУмш Hwoix vXv,v,o,)« nfli-l - мууюх к.ц-к/); 1 СХ m-ivi viwiM Экстремумы параметра нагружения равны соответственно 3 nax 3wiax i SwdX , - ЧУУЛ. )-4n,i. Ошибки в воспроизведении экстре мумов : гГ - К XгГ 1 1 упли а ИГгци8Соответственно для каждого -го цикла ступени экстремумы управляющего сигнала формируются по следу ющей зависимости 1 Ч41.. а ошибки в воспроизведении экстремумов равны: rf- -кЧ iv«oix i v vpcixT I hwiin Для сравнения на фиг. 2а представлены графики изменения управляющего сигнала и параметра нагружения при способе автоматического управления, реализуемом известным устройством, где не компенсируются ошибки воспроизведения экстремумов нагрузки, вызванные динамическими искажениями следящей системы. В предложенном устройстве (фиг.26) эти ошибки не компенсируются только в первом цикле каждой ступени. Однйк6, уЧИТЫвая большое число циклов нагружения на каждой ступени, можно заключить, 4tо точность воспроизведения экстремальных значений нагрузок существенно повышается на каждой ступени и позволяет проводить испытания в области высоких частот, где динамические ошибки следящей системы весьма значительны. Практически точность воспроизведения экстремумов нагрузки определяется только точно- . стью блока задания ступеней нагружения 1 и экстрематора 12, погрешность которых в современных устройствах не превышает 0,1-0,2. В современных машинах для усталости Hbix испытаний конструкций применение предлагаемого устройства позволит повысить частоту нагружения до предела, ограниченного мощностью нагружающих устройств испытательной, машины, т.е. более чем в 2-3 раза. При этом существенно повышается достоверность испытаний за счет повышения точности воспроизведения экстремумов нагрузки при многоступенчатом программном нагружении. Технико-экономический эффект от ведрения предложенного устройства на одном предприятии заключается в гооовой экономии 17.000 руб Формула изобретения Устройство для управления циклиеским нагружением при прочностных
испытаниях, содержащее программный задатчик, датчик нагрузки, подключенный к входу устройства, и включенные последовательно интерполятор и следящий исполнительный блок, соединенный с выходом устройства, отличающееся тем, что, с целью повышения точности и надежности устройства, оно содержит блок определения экстремума и две параллельные цепи, каждая из которых состоит из включенных последовательно компаратора, накопителя и сумматора, подключенного вцходом к соответствующему входу интерполятора, причем первые входы компараторов соединены с другими входами соответствующих
сумматоров и подключены к первым выходам программного задатчика, второй выход которого соединен с другими входами обоих накопителей, а выход датчика нагрузки подключен через блок определения экстремума к вторым входам компараторов.
Источники информации, принятые во внимание при экспертизе
1.Литвак В.И, Автоматизация усталостных испытаний натурных конструкций. М., Машиностроение, 1972,
с. 102-120.
2,Авторское свидетельство СССР № 395298, кл. G 06 G 7/26, 1972 (прототип).
Упчпах
ynfaS/iftHHu cutn0/f
Ja ftaeftHs fucmftfyw вЛ
fnKinuvecKafi непрузка
.
-I...|.ri
л max
и Т Г/
Упра6а ющ 1и сигнал