(5) МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ ДИНАМОМЕТР
| название | год | авторы | номер документа |
|---|---|---|---|
| Функциональный преобразователь | 1983 |
|
SU1145353A1 |
| Устройство для распознавания объектов на двумерном поле | 1981 |
|
SU1012459A1 |
| Интерполятор | 1983 |
|
SU1142848A1 |
| Имитатор технологического объекта | 1980 |
|
SU924672A1 |
| Устройство для измерения температуры | 1984 |
|
SU1281921A1 |
| Цифровой динамометр | 1978 |
|
SU682774A1 |
| Устройство для индикации распределения биопотенциалов на поверхности тела человека | 1978 |
|
SU688180A2 |
| Линейный интерполятор | 1989 |
|
SU1686408A1 |
| Линейный интерполятор | 1982 |
|
SU1075276A1 |
| Линейный интерполятор | 1987 |
|
SU1550475A1 |
1
Изобретение относится к импульсной технике и предназначено для регистрации усилий, оперативной оценки усилий , превышающих заданные допустимые значения, и оценки распределения усилий при ограниченном числе датчиков на исследуемом объекте в ряде различных измерений.
Известен цифровой динамометр, содержащий преобразователь усилия в код, соединенный через арифметический блок с коммутатором, выход которого подключен к входу преобразователя кода в усилие, связанного с индикатором, выполненным в виде блока цифровой индикации, и стабилизированный источник питания указанных блоков и преобразователя р .
К недостаткам известного динамометра относятся низкая точность и невозможность регистрации заданных допустимых усилий.
Наиболее близким по технической сущности к изобретению является циф.ровой динамометр, содержащий прёоб- разователь усилия в код, соединенный через арифметический блок с сигнальным входом коммутатора, выход которого связан со входом преобразователя кода в усилие, первый выход которого соединен с первым входом
10 блока цифровой индикации, а второй выход связан с первым входом блока сравнения, первый выход которого соединен с первым входом блока световой индикац|1и, второй выход подклю,j чен к входу блока управления, а другой вход блока сравнения подключен к первсту выходу блока управления, вторрй и третий выходы которого со- : единены соответственно с управляющим
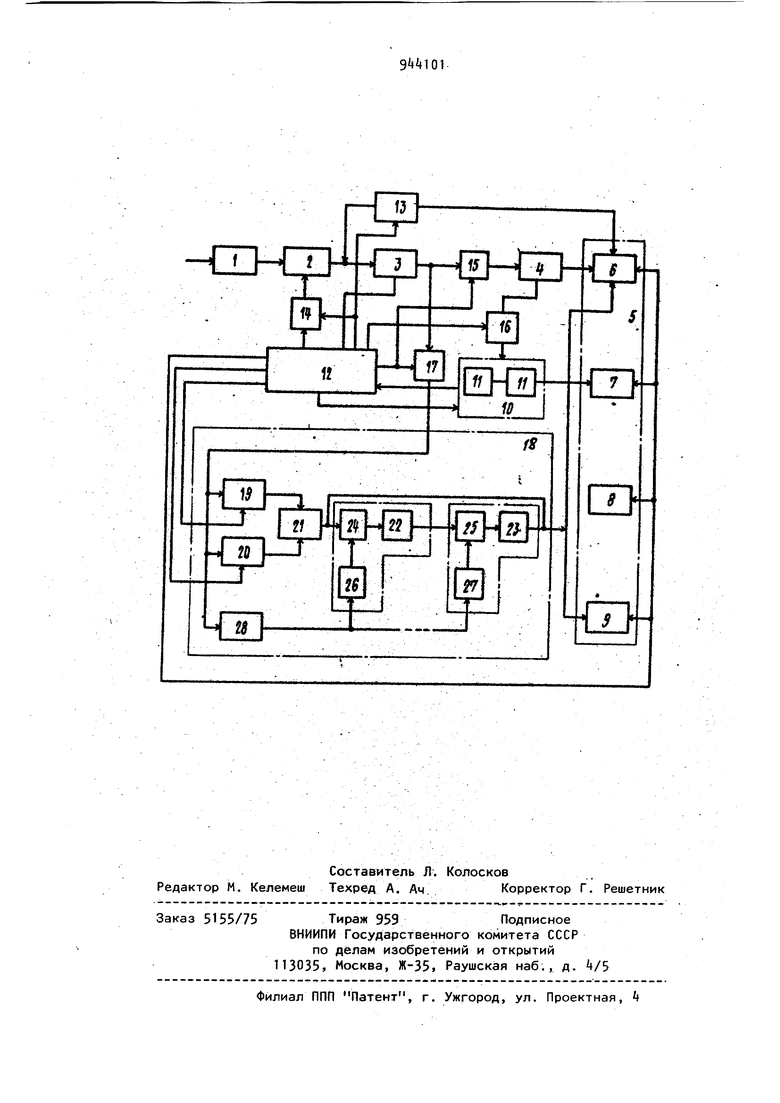
20 входом коммутатора и управляющими входами блоков цифровой и световой индикации 2J.
Однако и данный динамометр характеризуется низкой точностью изме 3 g рений, обусловленной отсутствием возможности оперативной оценки те кущей погрешности и ограниченным числом датчиков, которое не позволяет оценить распределение усилий на исследуемом объекте. Цель изобретения - повышение точности измерений. Поставленная цель достигается тем ч.то в многоканальный цифровой дина-мометр, содержащий преобразователь усилия в код, соединенный через ариф метический блок с сигнальным входом коммутатора, выход которого связан со входом преобразователя кода в усилие, первый выход которого соединен с первым входом блока цифровой индикации, а второй выход связан с первым входом блока сравнения,первый вход которого соединен с первым входом блока световой индикации, второй вход подключен к входу блока управления, другой вход блока сравнения подключен к первому выходу блока управления, второй и третий выходы которого соединены соответственно с уп равляющим входом коммутатора и управ ляющими входами блоков цифровой и св товой индикации, введены цифровой интерполятор, три элемента И, элемен И-НЕ и блок калибровки, причем вход блока калибровки подключен к четвертому выходу блока управления, а выходы подключены к сигнальному входу коммутатора и второму-входу блока цифровой индикации, управляющий вход первого элемента И подключен к входу блока калибровки, сигнальный вход первого элемента И соединен с пятым выходом блока управления, а выход подключен к управляющему входу арифметического блока, сигнальный вход второго элемента И подключен к второ му входу преобразователя кода в усил управляющий вход второго элемента И соединен с шестым выходом блока управления , а выход подключен к первому входу блока сравнения, сигнальный вход элемента И-НЕ подключен к выход компаратора,выход элемента И-НЕ соеди нен с входом преобразователя усилия в код, а управляющий вход подключен к седьмому выходу блока управления, соединенному с управляющим входом третьего элемента И, сигнальный вход которого подключен к сигнальному вхо ду элемента И-НЕ, а выход связан с .первым входом цифрового интерполятора, второй и третий выходы которого подключены соответственно к восьмому и девятому выходам блока управления, а выход соединен с третьим входом блока цифровой индикации и вторым входом блока световой индикации. При этом цифровой интерполятор содержит два входных элемента памяти, выходы которых подключены к входам элемента предварительной интерполяции, выход последнего подключен к цепи из п последовательно соединенных звеньев, каждое из которых состоит из элемента И и интерполирующего элемента, соединенных последовательно, и порогового элемента, вход которого подключен к второму входу элемента И, при этом выходы интерполирую-, щих элементов и элемента предварительной интерполяции соединены между собой и являются выходом цифрового интерполятора, управляющим входом которого являются соединенные между собой входы пороговых элементов, подключенные к выходу блока вычисления обратного коэффициента взаимной корреляции, вход которого соединен с сигнальными входами входных элементов памяти и является первым входом цифрового интерполятора. На чертеже представлена функциональная схема предлагаемого многоканального цифрового динамометра. Динамометр содержит преобразователь I усилия в код, арифметический блок 2, коммутатор 3 преобразователь 4 кода в усилие, индикатор 5, выполненный в виде блока 6 цифровой индикации и блоков 7, 8 и 9 световой индикации, блок 10 сравнения, состоящий из пороговых элементов 11, блок 12 управления, блок 13 калибровки, элемент И Н, элемент И-НЕ 15, элементы И 16 и 17, цифровой интерполятор 18, содержащий элементы 19 и 20 памяти, элемент 21 предварительной интерполяции, интерполирующие элементы 22 и 23, элементы И 2 и 25, пороговые элементы 2б и 27, блок 28 вычисления обратного коэффициента взаимной, корреляции. Измеряемые усилия поступают на преобразователь 1 усилия в код и затем на вход арифметического блока 2, где они фиксируются. Коммутатор 3, находящийся на выходе арифметического блока 2, подключен через элемент И-НЕ 15 к входу преобразователя 4 кода в усилие. 5 В режиме работы Измерение сигналы с Коммутатора 3 проходят через элемент И-НЕ 15 и поступают на вход преобразователя k кода в усилие, затем с первого выхода блока k преобразованные величины поступают на первый вход блока 6 цифровой индикации, где регистрируются. В режиме работы Контроль превышения с шестого выхода блока 12 управления на управляющий вход элемента И 16 поступает сигнал разрешения и преобразованные величины с второго выхода преобразователя k ко да в усилие поступают через элемент И 16 на вход блока 10 сравнения. При превышении преобразованной вели чиной усилия допустимого значения с второго выхода блока 10 сравнения поступает сигнал на вход блока 12 управления, цикл опроса прерывается осуществляется подключение той же самой ячейки из арифметического бло 2 и на первый вход блока 7 световой индикации поступает сигнал, указы вающий на наличие превышения допуска, а на управляющий вход блока 7 с третьего выхода блока 12 управления поступает сигнал указания места или номера параметра, вышедшего за допуск. Пp eкpaщeниe вызова на индикатор содержимого ячейки арифметического блока 2 после фиксации тенденции изменения величины усилия по дан ному каналу в ту или иную сторону осуществляется сигналом с второго выхода блока 12 управления. С первог выхода блока 12 управления регулируется подстройка величины допусков в блоке 10 сравнения в соответствии с заранее выбранным для каждого канала допустимым значением величины усилий В режиме работы Рельеф с седьмого выхода блока 12 управления пост пает сигнал на управляющий вход элемента И-НЕ 15 и одновременно на управляющий вход элемента И 17, что приводит к формированию пути прохож дения сигнала с выхода коммутатора 3 через- элемент И 17 на первый вход цифрового интерполятора 18. Далее сигналы, соответствующие двум точкам съема, фиксируются на элементах 19 и 20 памяти и в блоке 28 вычисления об ратного коэффициента взаимной корреляции. Величина коэффициента взаимной корреляции и степень интерполяции связаны обратной пропорционально зависимостью, т. е. при уменьшении 16 коэффициента степени интерполяции возрастает. Поэтому для осуществления последовательного подключения интерполирующих элементов 22 и 23 блок 28 выполнен так, что с его выхода на управляющие входы интерполирующих элементов поступает величина, обратная коэффициенту взаимной корреляции. При превышении установленных пороговых значений срабатывают соответст вующие элементы И 2, 25 и подключаются последующие интерполирующие элементы. Степень интерполяции возрастает, обеспечивая учет взаимосвязи между интерполируемыми точками. Если значение обратного коэффициента не превышает ни одного из заранее установленных значений пороговых элементов 26 и 27, то фиксируемые значения сигналов пройдут только через элемент 21 предварительной интерполяции, с выхода которого сигнал сразу поступает на третий вход блока 6 цифровой индикации и на второй вход блока 9 . световой индикации промежуточных значений сигнала. В режиме работы Калибровка с четвертого и пятого выходов блока 12 поступают сигналы на управляющие входы соответственно блока 13 калибровки и элемента И k, а также на сигнальный вход элемента И 14. С выхода элемента И It на управляющий вход арифметического блока 2 поступает сигнал запрета прохождения фиксируемых усилий, а на сигнальный вход коммутатора 3 поступают калиброванные сигналы, величина которых регистрируется непосредственно блоком 6 цифровой индикации через второй его вход, и после прохождения сигналов через функциональную схему устройства они регистрируются на блоке 6 цифровс 1 индикации через его первый вход. Блоком 12 управления с третьего выхода осуществляется синхронизация индикации регистрируемых результатов через управляющий вход блока 6. Такое схемное решение позволяет оперативно оценить текущую погрешность измерения регистрируемых усилий, определить диапазон измерения для различных случаев и произвести тарировку, устройства в целом. Предлагаемый многоканальный цифровой динамометр позволяет уменьшить искажения при оценке распределения усилий, регистрировать допустимые усилия и фиксировать моменты превышения ими заданных уровней. Введение операций калибровки и тарировки позволяет расширить область применения данного устройства, т. е. устройство становится универсальным. Формула изобретения 1. Многоканальный цифровой динамометр, содержащий преобразователь усилия в код, соединенный через ариф метический блок с сигнальным входом коммутатора, выход которого связан с входом преобразователя кода в усилие, первый выход которого соединен с первым входом блока цифровой индикации, а второй выход связан с первы входом блока сравнения, первый выход которого соединен с первым входом блока световой индикации, второй выход подключен к входу блока управления, другой вход блока сравнения подключен к первому выходу блока управления, второй и третий выходы которого соединены соответственно с управляющим входом коммутатора и управляющими входами блоков цифрйвой и световой индикации, о т л и ч а - ю щ и и с я тем, что, с целью повы шения точности измерений, внего вве дены цифровой интерполятор, три элемента И,, элемент И-НЕ. и блок калибровки, вход которого подключен к четвертому выходу блока управления у а выходы подключены к сигнальному вхй ду коммутатора и второму входу блока цифровой индикации, управляющий вход первого элемента И подключен к входу блока калибровки, сигнальный вход первого элемента И соединен с пятым выходом блока управления, а выход подключен к управляющему входу арифметического блока, сигнальный вход второго элемента И подключен к второ му выходу преобразователя кода в уси лие, управляющий вход второго элемен та И соединен с шестым выходом блока управления, а выход подключен к перв му входу блока сравнения, сигнальный ВХОД элемента И-НЕ подключен к выходу коммутатора, выход элемента И-НЕ соединен с входом преобразователя усилия в код, а управляющий вход подключен к седьмому выходу блока управления, соединенному с управляющим входом третьего элемента И, сигнальный вход которого подключен к сигнальному входу элемента И-НЕ, а выход связан с первым входом цифрового интерполятора, второй и третий выходы которого подключены соответственно к восьмому и девятому выходам блока управления, а выход соединен с третьим входом блока цифровой индикации и вторым входом блока световой индикации. 2. Динамометр по п, I, о т л и ч а ю щ и и с я тем, что цифровой интерполятор содержит два входных элемента памяти, выходы которых под:ключены к входам элемента предварительной интерполяции, выход последнего подключен к цепи из п последователь но соединенных звеньев, каждое из которых состоит из элемента И и интерполирующего элемента, соединенных последовательно, и порогового элемента, вход которого подключен к второму входу элемента И, при этом выходы интерполирующих элементов и элемента предварительной интерполяции соединены между собой и являются выходом цифрового интерполятора, управляющим входом которого являются соединенные между собой входы пороговых элементов подключенные к выходу блока вычисления обратного коэффи.циента взаимной корреляции вход ко.торого соединен с сигнальными входа|ми входных элементов памяти и явля ется первым входом цифрового интерполятора . ( . Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР №539229, кл. G 01 N , 1975. 2.Авторское свидетельство СССР (Г 68277, кя. G 01 N I/O, 1977.
