Изобретение относится к измерительной технике и может быть использовано в частности, для измерения углового рассогласования между осью датчика и направлением на удаленный светящийся объект.
Известен фотоэлектрический датчик углового положения объекта, содержащий призму, одна грань которой покрыта отражающим покрытием, и два фотоприемника 1).
Недостатком известного датчика является низкая точность измерения.
Наиболее близким к изобретению по технической сущности является фотоэлектрический датчик углового положения объекта, содержащий цилиндрическую линзу и светоприемные устройства, расположенные в фокальных плоскостях линзы, а такие полупрозрачное зеркало 2.
Недостатком известного датчика является то, что разделение пучка света от объекта происходит за цилиндрической линзой, пучки света от полупрозрачного зеркала попадают на разные светоприемные устройства, что приводит к относительно высокой погрешности измерения и вызывает необходимость постоянно следить
за интенсивностью излучения источника света.
Цель изобретения - повышение точности измерения.
Поставленная цель достигается тем, что фотоэлектрический датчик углового положения объекта снабжен двумя слоевыми деталями, оптические оси которых пересекаются под углом,
10 равным апертурному углу слоевых деталей, а биссектриса этого угла является оптической осью датчика, и второй цилиндрической линзой, расположенной как и первая меязду соответст15вующими выходным торцок слоевой детали и светоприемным устройством.
С целью повышения чувствительности измерения светоприемные устройства выполнены в виде линейных матриц фото20диодов .
Кроме, того, с целью определения положения объекта относительно двух координатных осей он-снабжен , рым датчиком, расположенным с первым .
25 во взаимно перпендикулярных плоскостях.
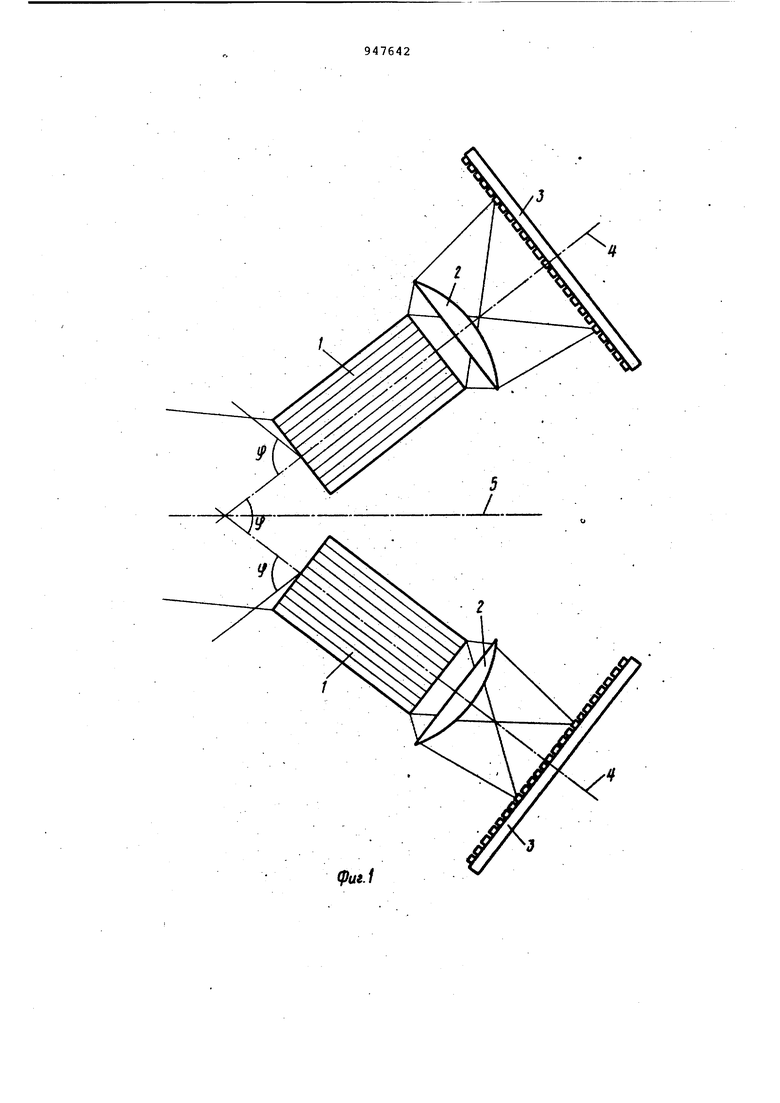
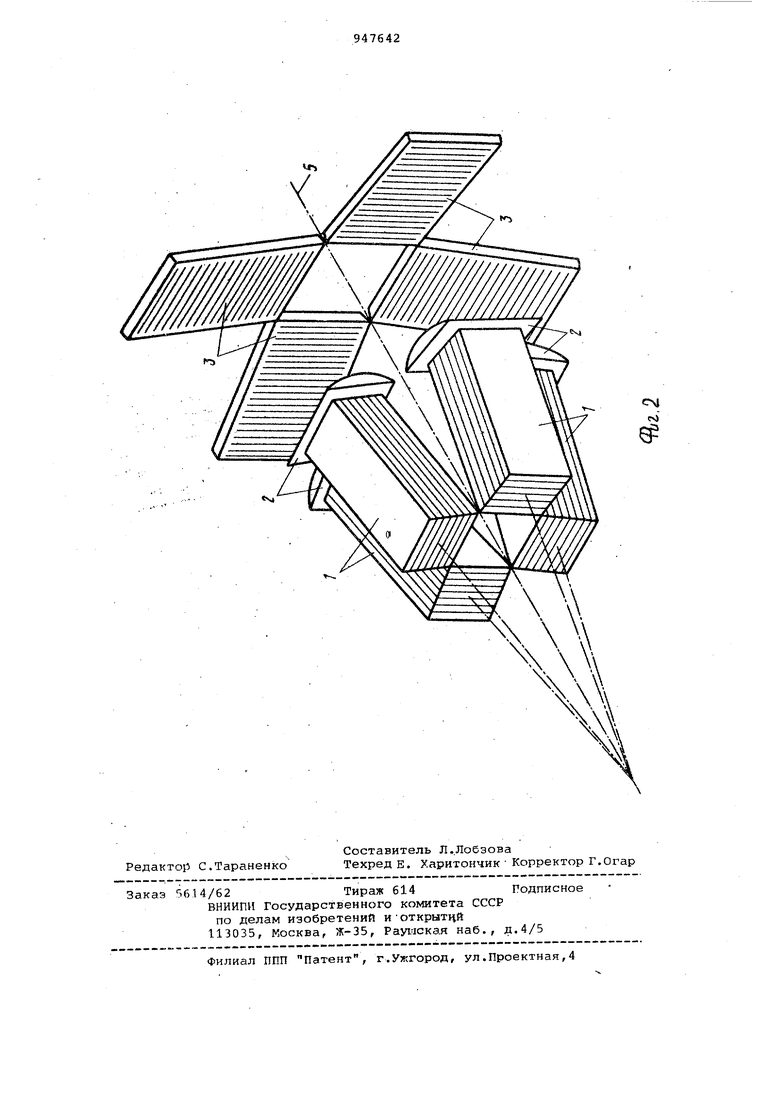
На фиг.1 изображена принципиаль-. ная схема фотоэлектрического датчика углового положения объекта} на - возможный вариант датчика.
30 Датчик содержит слоевые Детали 1 цилиндрические линзы 2, светоприемные устройства 3, выполненные в виде линейных матриц фотодиодов. Слоевые детали 1 состоят из чередующихся между собой оптически прозрачных плоскопараллельных световедущих и светоизолирующих слоев с различными, показателями преломления Причем показатель преломления световедущих слоев больше преломления све тоизолирующих слоев. Луч света по каждому из световедущих слоев распространяется по законам геометрической оптики благодаря полному внутреннему отражению на границах раздела световедущи-х и изолирующих слоев. Поэтому по слоевой детали могут распространяться только те лучи, которые падают на торец детали под углом к ее оптической оси {оптическая ось лежит в плоскости, парал лельной сЛоям). Слоевые детали 1 размещены в одной плоскости, параллельной координатной оси таким образом, что слои перпендикулярны плоскости, их оптические оси 4 пересекаются под углом tf , равным апертурному углу Ч слоевой детали 1, и оптическая ось 5 датчика служит биссектрисой этого угла. Непосредственно у выходных торцов слоевых деталей 1 размещено по цилиндрической линзе 2, в фЬкальной плоскости каждой линзы 2 распо-ложены светоприемные устройства 3 в виде линейных матриц фотодиодов. датчик работает следующим образо От светящегося объекта (не показ но), положение которого-надо опреде лить относительно одной оси координат, совпадающей с направлением оптической оси 5 датчика, на входные торцы обеих слоевых деталей 1 попад ет под некоторым углом пучок света. Пройдя слоевую деталь 1, свет разделяется ею на два пучка, угол мекду которьп ш вдвое больше, чем угол, под которым свет вошел во входной т рец слоевой детали 1. Оба пучка на выходе из слоевой детали 1 фокусируются линзой 2 на светоприемном устройстве 3 в виде двух тонких све тяпшхся отрезков прямой. Расстояние между отрезками прямых пропорционал но удвоенному углу наклона входного пучка света. Информация от одного светоприемного устройства 3 определяет величину угла координа ной осью и светящимся объектом. Рас положение светящихся отрезков прямо на втором светоприемном устройстве 3 определяет положение светящегося объекта относптельно опти,ческой оси 5 датчика слева, справа. Ср нивая расстояния между светяиимися отрезками прям1 1х на канцзом из свето приемных устройств 3, находят их разность, определяют величину рассогласования между осью 5 датчика и направлением на контролируемый объект. При точном наведении на объект расстояния между отрезками прямых равны и их разность равна нулю. измерения рассогласования положения объекта относительно двух взаимно перпендикулярных осей необходимо использовать два однокоординатных датчика (фиг.2), расположенных во взаимно перпендикулярных плоскостях. Для уменьшения габаритов датчика выходные торцы слоевых деталей 1 можно обработать в виде цилиндрических линз. Пpeдлaгae ий датчик может быть использован для построения систем измерения углового положения светящихся объектов, систем слекения за ними, а также может быть использован в фотоэлектрических автоколлиматорах для измерения отклонения зеркальных плоскостей от перпендикулярности к оси автоколлиматора. . Формула изобретения 1.Фотоэлектрический датчик углового положения объекта, содержащий цилиндрическую линзу и светоприемные устройства, расположенные в фокальных плоскостях линзы, о тличающийся тем, что, с целью повышения точности измерения, он снабжен двумя-слоевь и деталями, оптические оси которых пересекаются под углом, равным апертурному углу слоевых деталей, а биссектриса этого угла является оптической осью датчика, и второй цилиндрической линзой, расположенной как и первая между соответствующими выходным торцом слоевой детали и светоприемным устройством. 2.Датчик ПОП.1, отлича ющий с я тем, что, с целью повышения чувствительности измерения, светоприемные устройства выполнены в виде линейных матриц фотодиодов. 3.Датчик по ПП.1 и 2, о т л ичающийся тем, что, с целью определения положения объекта относительно двух координатных осей, он снабжен вторым датчиком, расположенным с первым во взаимно перпендикулярных плоскостях. Источники информации, принятые во внимание при экспертизе . 1.Авторское свидетельство СССР W 616531, кл. G 01 В 11/26, 1977. 2.Катыс Г.П. Оптико-электроннаш обработка информации. М., Машиностроение, 1973, с.363-364 (прототип) . х :