(54) ОПОРА ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора прямолинейного перемещения | 1979 |
|
SU863901A1 |
| Устройство для перемещения магнитной ленты | 1978 |
|
SU720533A2 |
| Спора прямолинейного перемещения | 1976 |
|
SU594351A2 |
| Опора прямолинейного перемещения | 1975 |
|
SU581336A1 |
| Пьезокерамическая муфта | 1982 |
|
SU1017846A1 |
| Устройство перемещения ленточного носителя | 1980 |
|
SU932557A1 |
| Вибродвигатель | 1979 |
|
SU845198A1 |
| Вибрационное лентопротяжное устройство | 1988 |
|
SU1597916A1 |
| Опора прямолинейного перемещения | 1976 |
|
SU623023A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
1
Изобретение относится к приборостроению и касается конструкций прецизионных подвижных опор.
Известна опора прямолинейного перемещения, содержащая подвижный элемент, имеющий коробчатое поперечное сечение, 5 с размещенными внутри него по крайней мере двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, каждый из которых выполнен в виде пьезо- Q элемента с секторными электродами, подсоединенными к источнику высокочастотного напряжения через фазосдвигающую схему. Электроды размещены на внутренней и наружной боковых поверхностях пьезоэлементов, выполненных в виде цельных 5 колец, а гибкая лента изготовлена из диэлектрического материала 1.
Недостатками известной опоры прямолинейного перемещения являются сравнительно низкая несущая способность и вы- 20 сокое электропотребление в связи с тем, что не используется вся рабочая поверхность пьезоэлектрических колец. При этом гибкая лента сравнительно тонкая и затрудняет образование волнового деформационного процесса между ею и эластичными кольцами, что также способствует повышенной электропотребляемости.
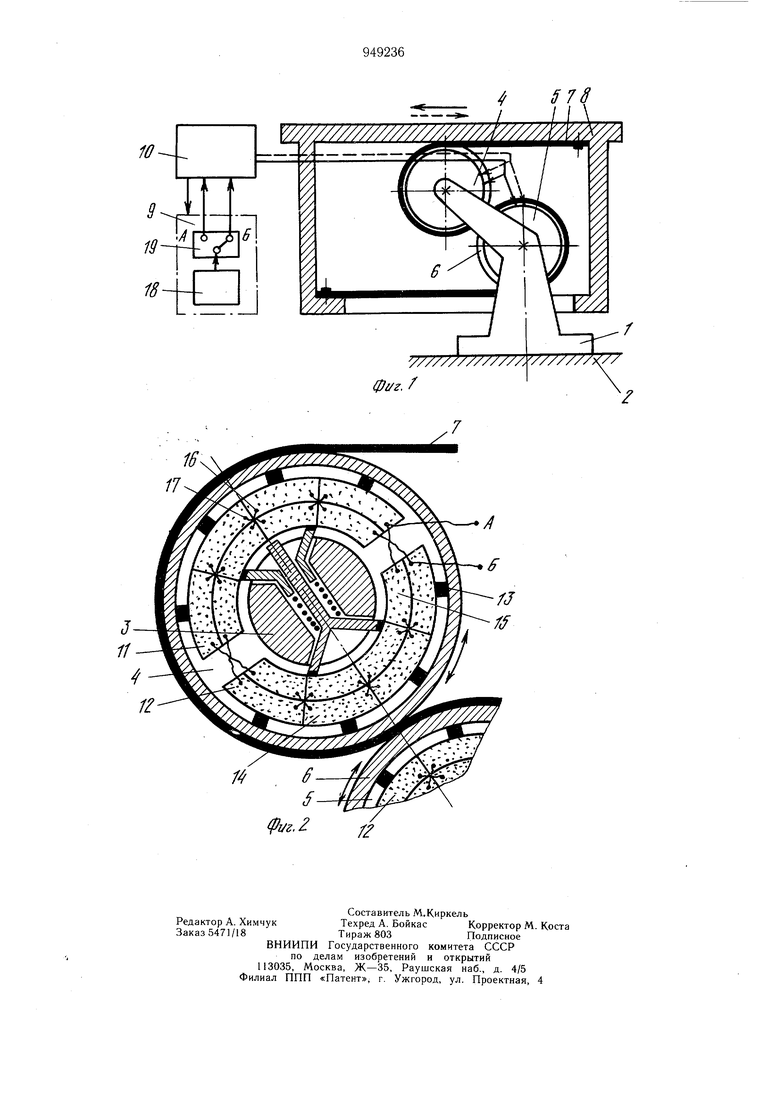
Известна также опора прямолинейного перемещения, содержащая основание, подвижный элемент, имеющий коробчатое поперечное сечение, с размещенными внутри него nq крайней мере двумя контактирующими с З-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, в каждом из которых помещены пьезокерамические кольца, электроды которых подключены к генератору переменного напряжения. Опора снабжена установленным с натягом между роликами пьезопреобразователем, выполненным в виде пластинки, электроды которой разделены на четыре идентичных сектора, соединенных перекрестно между собой, а также дополнительным генератором переменного напряжения и сопряженным с ним фазовращателем, датчиком положения, реверсивным счетчиком, блоком сравнения кодов, блоком вентилей и блоком управления, при этом сектора пьезопреобразователя через блок вентилей подключены к дополнительному генератору переменного напряжения и фазовращателю, а датчик положения через последовательно соединенные реверсивный счетчик и блок сравнения кодов подключен к блоку управления, соединенному с блоком вентилей и реверсивным счетчиком 2. Недостатками известной опоры прямолинейного перемещения являются сравнительно низкие несущая способность и надежность устройства. Пьезопластинка не способна развить достаточно высокий момент вращения роликов, а тем самым и несущую способность опоры, так как пьезопластинка претерпевает значительные механйческие усилия, а при увеличении амплитуды питающего напряжения нагревается и в результате механически разрущается. При фрикционном взаимодействии кольцевых пьезокерамических элементов роликов и их охватывающих жестких колец роликов со временем контактные зоны механически изнащиваются, появляются люфты, при этом затрудняется создание вибрационной сжатой газовой пленки (ВСГП) в роликах, что увеличивает энергопотребляемость опоры, а также жесткие кольца роликов уходят в сторону наименьщего сопротивления - от башмаков пьезопластинки, в результате чего бащмаки неравномерно сопрягаются с роликами, т. е. опора прямолинейного перемещения не обеспечивает надежность работы. Кроме этого, выставление кольцевых пьезокерамических элементов в роликах для oбecпe eния ВСГП, а также пьезопластинки, весьма точная и трудоемкая работа. Цель изобретения - повыщение несущей способности и надежности работы. Поставленная цель достигается тем, что в опоре прямолинейного перемещения, содержащей основание, подвижный элемент, имеющий коробчатое поперечное сечение с размещенными внутри него по крайней мере двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, в каждом из которых помещен в жесткой обойме кольцевой пьезокерамический преобразователь, установленный на кронштейне и электроды которого через блок управления перемещением подвижного элемента подключены к блоку питания, выполненному в виде генератора переменного напряжения, при этом каждый ролик снабжен размещенными между пьезокерамическим преобразователем и жесткой обоймой бащмаками, каждый кольцевой пьезокерамический преобразователь выполнен Б виде двух пьезокерамических полуколец, разделенных на сектора и дополнительно коаксиальным сечением на отдельные части, и размещенного между ними центрирующего механизма, обеспечивающего их унругорадиальное перемещение в плоскости, проходящей через линию контакта роликов, электроды пьезокерамических преобразователей размещены на их торцовых поверхностях и электрически соединены между собой в щахматном порядке в две группы, группы электродов пьезокерамических преобразователей через блок управления перемещением подвижного элемента подключены к блоку питания, при этом блок питания выполнен в виде последовательно соединенных переключателя и упомянутого генератора переменного напряжения. На фиг. 1 изображена предлагаемая опора, общий вид; на фиг. 2 - ролик без кронщтейна, разрез. Опора прямолинейного перемещения (фиг. 1) содержит кронщтейн 1, прикрепленный к неподвижному основанию 2. К кронщтейну 1 крепится центрирующий механизм 3 (фиг. 2), на котором устанавливаются ролики 4 и 5, через жесткую обойму 6 сопряженные с огибающей их S-образно щироким углом гибкой лентой 7 с натягом, неподвижно прикрепленной концами к подвижному элементу 8, имеющему коробчатое поперечное сечение. Опора также содержит блок 9 питания, через блок 10 управления перемещением подвижного элемента 8 подключенного к электродам кольцевых пьезокерамических преобразователей роликов 4 и 5, каждый из которых содержит кольцевой пьезокерамический преобразователь, образованный из двух полуколец II и 12, на внещней цилиндрической поверхности которых симметрично прикреплены бащмаки 13, сопряженные с жесткой обоймой 6, при этом центрирующий механизм обеспечивает упругорадиальное перемещение пьезокерамических полуколец 11 и 12 в плоскости, проходящей через линию контакта роликов 4 и 5 и между бащмаками 13. Полукольца 11 и 12 разделены на сектора и дополнительно коаксиальным сечением на отдельные части 14 и 15, при этом электроды 16 и 17 пьезокерамических преобразователей размещены на их торцовых поверхностях и электрически соединены между собой в щахматном порядке в две группы, подключенные к блоку 9 питания, при этом блок 9 питания снабжен последовательно соединенным с генератором 18 переменного напряжения переключателем 19. Опора прямолинейного перемещения работает следующим образом. При подаче от блока 10 управления сигнала на блок 9 питания, высокочастотное напряжение от генератора 18 переменного напряжения через переключатель 19, электрически переключенного в положение А, подается к блоку 10 управления, а от него
к электродам 17 частей 15 пьезокерамических полуколец 11 и 12 роликов 4 и 5. В полукольцах П и 12 образуются стоячие волны, которые заставляют вращаться по эллипсоидной траектории башмаки 13, взаимодействие которых с жесткой обоймой 6 способствует вращению последней и перемещению подвижного элемента 8. Реверс перемещения подвижного элемента 8 обеспечивается переключением переключателя 19 в положение Б. В данном случае высокочастотным напряжением питаются электроды 16 частей 14 полуколец 11 и 12 роликов 4 и 5, и жесткие обоймы 6 вращаются в направлении, противоположном предыдущему, перемещая подвижный элемент 8 в противоположную сторону. Отключив высокочастотное напряжение от электродов пьезокерамических полуколец 11 и 12 роликов 4 и 5, бащмаки 13 фиксируют жесткую обойму 6 упомянутых роликов, при этом обеспечивается быстродействие опоры в старт-стопном режиме работы. Разделение пьезокерамического преобразователя на два полукольца 11 и 12 и обеспечения постоянного упругого прижима башмаков 13 полуколец 12 и 11 к жестким обоймам 6 роликов 4 и 5 даже при износе контактирующей пары «башмаки-жесткая обойма обеспечивает высокую надежность работы опоры, повышают ее -мощность.
Исследования показывают, что по сравнению с известной, несущая способность опоры увеличена на 45-48%, а также увеличена надежность работы опоры, при этом упрощена схема блока питания.
Формула изобретения
Опора прямолинейного перемещения, содержащая основание, подвижный элемент, имеющий коробчатое поперечное сечение с размещенными внутри него по крайней мере двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, в каждом из которых помещен в жесткой обойме кольцевой пьезокерамический преобразователь, установленный на кронштейне и электроды которого через блок управления перемещением подвижного элемента подключены к блоку питания, выполненному в виде генератора переменного напряжения, отличающаяся тем, что, с целью повышения несущей способности и надежности, каждый ролик снабжен размещенным между пьезокерамическим преобразователем и жесткой обоймой бащмаками, каждый кольцевой пьезокерамический преобразователь выполнен в виде двух пьезокерамических полуколец, разделенных на сектора и дополнительно коаксиальным сечением на отдельные части, и размешенного между ними центрирующего механизма, обеспечивающего их упругорадиальное перемещение в плоскости, проходящей через линию контакта роликов, электроды пьезокерамических преобразователей размещены на их торцовых поверхностях и электрически соединены между собой в щахматном порядке в две группы, подключенные к блоку питания, при этом блок питания снабжен последовательно соединенным с генератором переменного напряжения переключателем.
Источники информации, принятые во внимание при экспертизе
4 П,д
