(54) ОПОРА ПРЯМОЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Опора прямолинейного перемещения | 1981 |
|
SU949236A1 |
| Опора прямолинейного перемещения | 1975 |
|
SU581336A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Устройство для управления пьезоэлектрическим вибродвигателем | 1978 |
|
SU744879A1 |
| Спора прямолинейного перемещения | 1976 |
|
SU594351A2 |
| Устройство для измерения натяжения магнитной ленты | 1990 |
|
SU1783328A1 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Устройство для управления ша-гОВыМ ВибРОдВигАТЕлЕМ | 1979 |
|
SU801151A1 |
| Вибродвигатель | 1981 |
|
SU968869A1 |
1
Изобретение относится к приборостроению, в частности к конструкции прецизионных подвижных опор.
Известна опора прямолинейного перемещения, содержащая подвижный элемент, имеющий коробчатое поперечное сечение, с размещенными внутри него по крайней мере двумя выполненными в виде пьезокерамических элементов, подсоединенных к источнику высокочастотного напряжения, роликами, жестко установленными на основании и взаимодействующими с S-образно огибающей ролики гибкой лентой, закрепленной на подвижном элементе, причем опора снабжена фазосдвигающей схемой и эластичными кольцами, охватывающими ролики, выполненные каждый по крайней мере из трех секторов, подключенных к источнику высокочастотного напряжения через фазосдвигающую схему 1.
Недостатки этой опоры - относительно малые мощность, быстродействие пуска (так как бегущие волны деформации пьезокерамических колец демпфируются эластичными кольцами) и коэффициент трансформации энергии огибающей ролики гибкой ленты. При этом из-за отсутствия датчика положения подвижного элемента точность перемещения опоры является относительно низкой.
Известна также опора прямолинейного перемещения, содержащая подвижный элемент, имеющий коробчатое поперечное
5 сечение, с размещенными внутри него по крайней мере двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, каждый из которых выполнен в виде пьезоэлемента с секторами электродов,
10 подсоединенными к генератору переменного напряжения через фазосдвигающую схему, причем электроды размещены на внутренней и наружной боковых поверхностях пьезоэлементов, выполненных в виде цель,5 ных колец, а гибкая лента изготовлена из диэлектрического материала 2.
Недостатки данной опоры состоят в том, что у нее также относительно малая мощность и быстродействие пуска, так как бегущие волны деформации .пьезокерамичес20 ких колец демпфируются эластичными кольцами, а коэффициент трансформации энергии огибающей ролики гибкой ленты является маленьким, так как гибкая лента деформируется при деформации эластичных колец. Кроме того, из-за отсутствия датчика положения подвижного элемента точность перемещения опоры является относительно низкой.
Целью изобретения является повышение мощности, быстродействия пуска и точности перемещения опоры.
Поставленная цель достигается тем, что опора прямолинейного перемещения, содержащая подвижный элемент, имеющий коробчатое поперечное сечение, с размещенными внутри него, по крайней мере, двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, в каждом из которых помещены пьезокерамичеСкие кольца, электроды которых подключены к первому источнику переменного напряжения, снабжена установленными с натягом между роликами пьезопреобразователем, выполненным в виде пластинки, электроды которой разделены на четыре идентичных сектора, соединенных перекрестно между собой, а также дополнительными генератором переменного напряжения и сопряженным с ним фазовращателем, датчиком положения, реверсивным счетчиком, блоком сравнения кодов, блоком вентилей и блоком управления, при этом секторы пьезопреобразователя через блок вентилей подключены к дополнительным генератору переменного напряжения и фазовращателю, а датчик положения через последовательно соединенные реверсивный счетчик и блок сравнения кодов подключен к блоку управления, соединенному с блоком вентилей и реверсивным счетчиком.
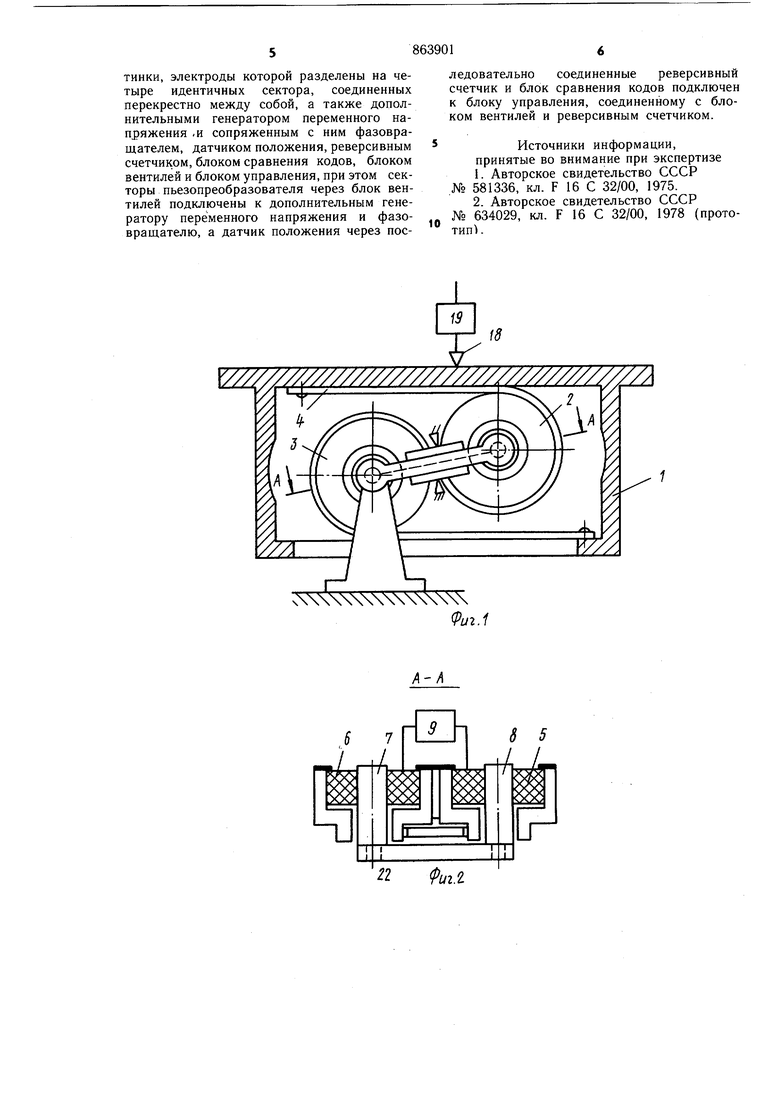
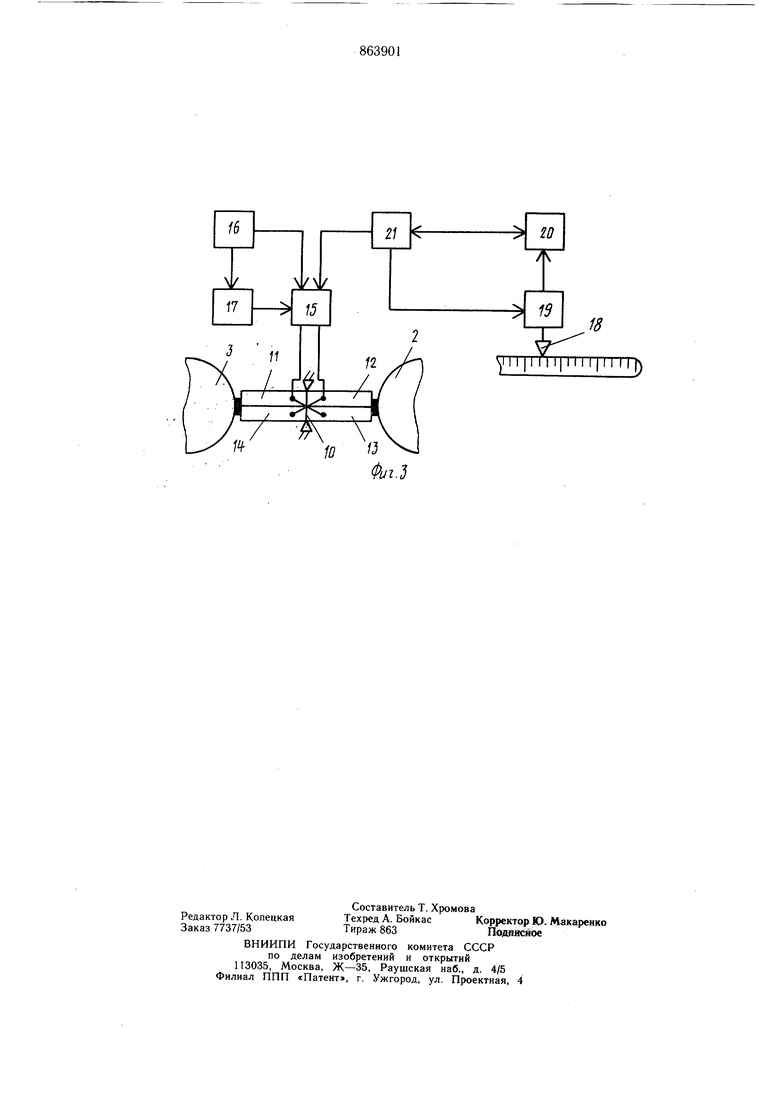
На фиг. 1 показана предлагаемая опора, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - электрическая схема питания управления опоры.
Опора содержит подвижный элемент 1, имеющий коробчатое сечение, внутри которого размещены два ролика 2 и 3, которые контактируют с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой 4. В каждом ролике 2 и 3 помещены пьезокерамические кольца 5 и 6, жестко насаженные на неподвижных осях 7 и 8. Электроды пьезокерамических колец подключены к источнику 9 переменного напряжения. Между роликами 2 и 3 с натягом установлен пьезопреобразователь 10, выполненный в виде пластинки, электроды которой разделены на четыре идентичных
сектора 11, 12, 13 и 14, которые соединены перекрестно между собою и через блок вентилей 15 подключены к генератору 16 переменного напряжения и фазовращателю 17. Датчик положения 18 через реверсивный счетчик 19 и блок сравнения кодов 20 подключен к блоку управления 21, соединенному также с блоком вентилей 15 и реверсивным счетчиком 19.
Опора работает следующим образом. При включении перемещения подвижного элемента 1 опоры сигналы переменной частоты с генератором 9 и 16 подаются к обкладкам пьезокерамических колец 5
и 6 и пьезопреобразователя 10, выполненного в виде пластинки. При радиальных высокочастотных колебаниях колец 5 и 6 между ними и подвижными роликами 2 и 3 создаются воздущные пленки, снижающие силы трения. При подаче переменных сигналов к перекрестно соединенным обкладкам 11, 13 и 12, 14 пьезопреобразователя 10 концы его соверщают колебания по эллипсу и взаимодействуют с боковыми поверхностями роликов 2 и 3, сообщая им момент
вращения в противоположных направлениях. Так как ролики 2 и 3 S-образно огибает гибкая лента 4, концы которой закреплены на подвижном элементе 1, он начинает перемещаться. Направление перемещения устанавливается при помощи блока
управления 21, сигнал которого через блок вентилей 15 подает соответствующие сигналы питания обкладок пьезопреобразователя 10 с генератора 16 переменного напряжения и сопряженного с ним фазовращателя 17. При перемещении подвижного элемента 1 сигнал с датчика положения 18 подается к реверсивном-у счетчику 19, показания которого соответствуют положению опоры и сравниваются с заданным блоком управления 21 положением опоры в блоке
0 сравнения кодов 20. При соответствии кодов блок питания выключает питание пьезокерамических элементов, тем самым останавливая перемещение подвижного элемента 1 с больщой точностью.
Таким образом, использование пьезопреобразователя, выполненного в виде пластинки, как ведущего узла, вращающего ролики 2 и 3, и пьезокерамических колец для уменьщения сил трения при вращении роликов способствует повыщению мощности и быстродействию пуска перемещения опоры.
Формула изобретения
5 Опора прямолинейного перемещения, содержащая подвижный элемент, имеющий коробчатое поперечное сечение, с размещенными внутри него, по крайней мере, двумя контактирующими с S-образно огибающей их и закрепленной на подвижном элементе гибкой лентой роликами, в каждом из которых помещены пьезокерамические кольца, электроды которых подключены к генератору переменного напряжения, отличающаяся тем, что, с целью повыщения
5 мощности, быстродействия пуска и точности перемещения, опора снабжена установленным с натягом между роликами пьезопреобразователем, выполненным в виде пластинки, электроды которой разделены на четыре идентичных сектора, соединенных перекрестно между собой, а также дополнительными генератором переменного напряжения .и сопряженным с ним фазоврапдателем, датчиком положения, реверсивным счетчиком, блоком сравнения кодов, блоком вентилей и блоком управления, при этом секторы пьезопреобразователя через блок вентилей подключены к дополнительным генератору переменного напряжения и фазовращателю, а датчик положения через последовательно соединенные реверсивный счетчик и блок сравнения кодов подключен к блоку управления, соединенному с блоком вентилей и реверсивным счетчиком.
Источники информации, принятые во внимание при экспертизе
№ 634029, кл. F 16 С 32/00, 1978 (прототипК
4X XV4VC V4
(PU2.1
8 5
2 (.t
Y I I I I I I I I I I I I I I I 1
