(54) МИКРОМАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Схват микроманипулятора | 1989 |
|
SU1703450A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Опора прямолинейного перемещения | 1981 |
|
SU949236A1 |
| Вибродвигатель | 1981 |
|
SU968868A1 |
| Привод запоминающего устройства | 1980 |
|
SU972583A1 |
| Печатающее устройство | 1980 |
|
SU885076A1 |
I
Изобретение относится к приборостроению и может быть применено в подвижных узлах микророботов и микроманипуляторов.
Известен микроманипулятор, содержащий корпус, рычаги, прикрепленные к ним губки, привод и блоки питания и управления 1.
Недостатками известного устройства являются сложность конструкции, низкое быстродействие и малая точность.
Цель изобретения - упрощение конструкции и повыщение быстродействия и точности перемещения губок.
Поставленная цель достигается тем, что каждый подвижный рычаг выполнен из упругой металлической ленты, согнутой в Г-образный угольник, на сторонах которого прикреплено, например приклеено, не менее, чем по одной дополнительно введенной в устройство пьезокерамической пластинке с электродами, электроды каждой пьезокерамнческой пластинки через коммутатор соединены с блоком напряжения, а к управляющему входу коммутатора подключен блок управления, причем один
конец угольника прикреплен к корпусу, а к другому концу прикреплена губка.
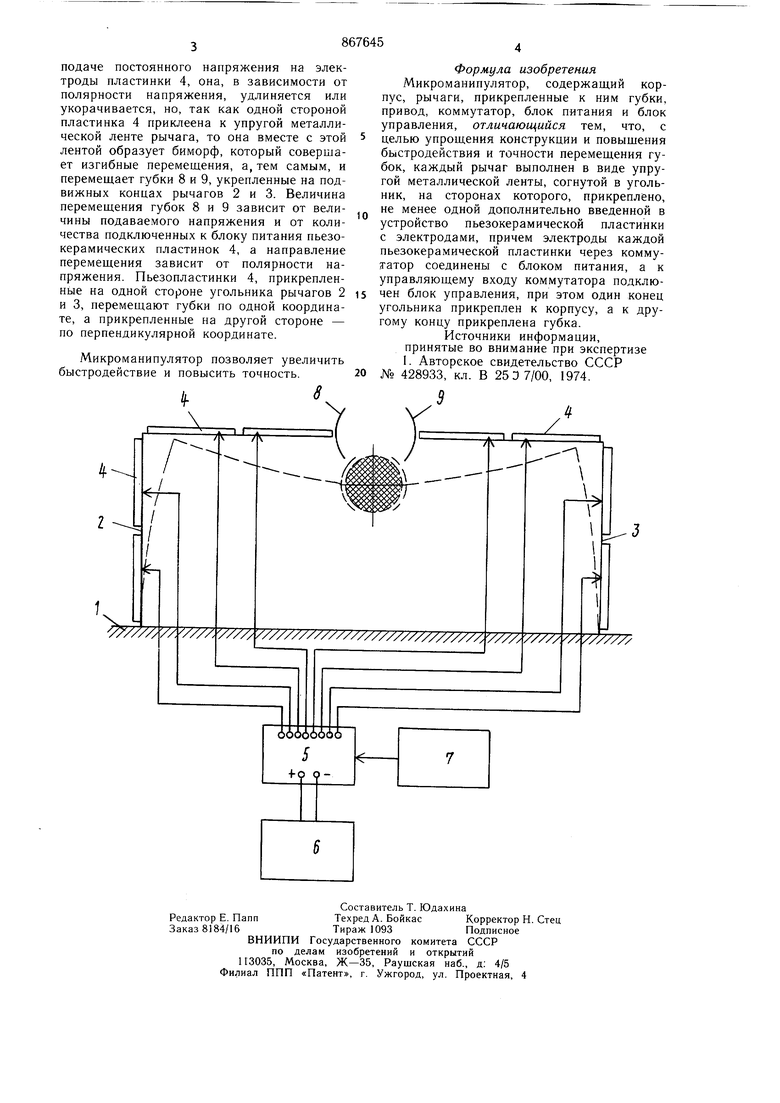
Устройство микроманипулятора поясняется чертежом.
Микроманипулятор содержит корпус 1, к которому прикреплены одним концом рычаги 2 и 3, каждый из которых выполнен из упругой металлической ленты,согнутой в Г-образный угольник, на сторонах которого приклеено не менее, чем по одной пьезокерамической пластинке 4 (на чертеже показано по две пьезокерамические пластинки 4) электроды всех пластинок 4 соединены ерез коммутатор 5 с блоком постоянного напряжения 6, а к управляющему входу коммутатора подключен блок управления 7, губки 8 и 9 прикреплены к подвижным цам рычагов 2 и 3.
Манипулятор работает следующим образом.
При включении блока постоянного напряжения 6, напряжение подается на контакты коммутатора, 5, к которым по сигналу блока управления 7 подключаются электроды одной, двух или при необходимости всех пьезокерамических пластинок 4. При подаче постоянного напряжения на электроды пластинки 4, она, в зависимости от полярности напряжения, удлиняется или укорачивается, но, так как одной стороной пластинка 4 приклеена к упругой металлической ленте рычага, то она вместе с этой лентой образует биморф, который совершает изгибные перемещения, а, тем самым, и перемещает губки 8 и 9, укрепленные на подвижных концах рычагов 2 и 3. Величина перемещения губок 8 и 9 зависит от величины подаваемого напряжения и от количества подключенных к блоку питания пьезокерамических пластинок 4, а направление перемещения зависит от полярности напряжения. Пьезопластинки 4, прикреплен11 IJ л fT.liIifi .1 1 11У1ич-1/ Д11Ч )jij......-ные на одной стороне угольника рычагов 2 и 3, перемещают губки по одной координате, а прикрепленные на другой стороне - но перпендикулярной координате Микроманипулятор позволяет увеличить быстродействие и повысить точность. i Формула изобретения Микроманипулятор, содержащий корпус, рычаги, прикрепленные к ним губки, привод, коммутатор, блок питания и блок управления, отличающийся тем, что, с целью упрощения конструкции и повыщения быстродействия и точности перемещения губок, каждый рычаг выполнен в виде упругой металлической ленты, согнутой в угольник, на сторонах которого, прикреплено, не менее одной дополнительно введенной в устройство пьезокерамической пластинки с электродами, причем электроды каждой пьезокерамической пластинки через коммутатор соединены с блоком питания, а к управляющему входу коммутатора подклюJГ-J-чен блок управления, при этом один конец угольника прикреплен к корпусу, а к другому концу прикреплена губка. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 428933, кл. В 25 D 7/00, 1974. 5
